







背景知识介绍
下图所示是正交编码器输出的信号。一般情况下输出A/B正交信号和 I 绝对位置信号。
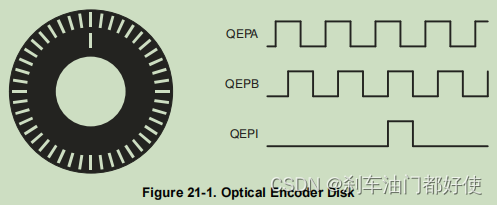
实际应用中A/B/I的波形如下图所示,I 位置处为0,然后由A B的相位变化区分方向正转和反转。
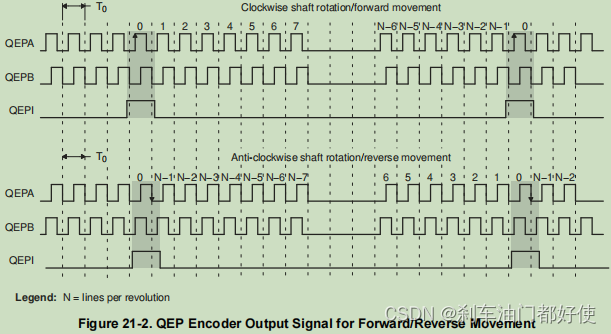
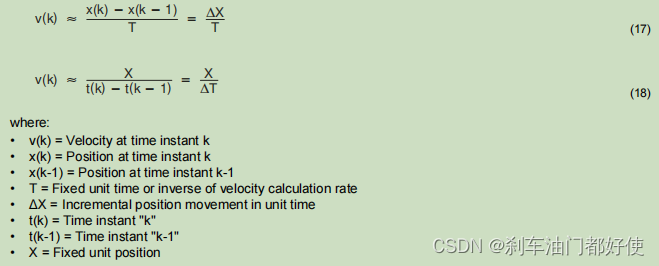
计算转速有如下2个公式。为获得较高精度,高速状态下使用公式17计算,低速状态下使用公式18计算。
功能框图概览
下图是EQEP的整体框图。

从GPIO获取输入,然后送到QDU子模块。
QDU子模块在QDECCTL控制寄存器配置后可以正常工作,把输入信号处理后得到QCLK和QDIR两个关键信号,还有QI QS两个信号。
然后PCCU子模块在QEPCTL/QEINT等寄存器配置后正常工作,使用QDIR和QCLK来进行增减计数。产生一些latch,cmp事件,中断事件等。
UTIME可以产生一个时基,送给PCCU和QCAP使用。
QWDOG可以用来检测电机停转。
QCAP主要用于低速测量。
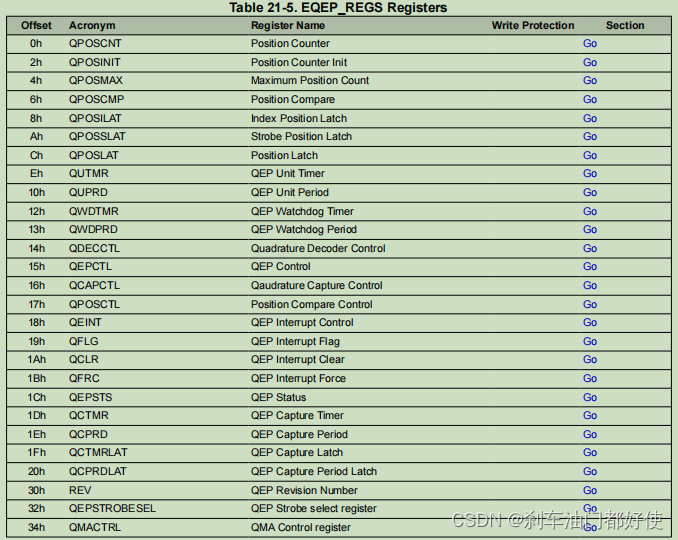
寄存器
参考文档:
TMS320F28004x Real-Time Microcontrollers Technical Reference Manual (Rev. G)















 1082
1082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









