







一、维纳滤波器介绍
1.1系统输入与输出
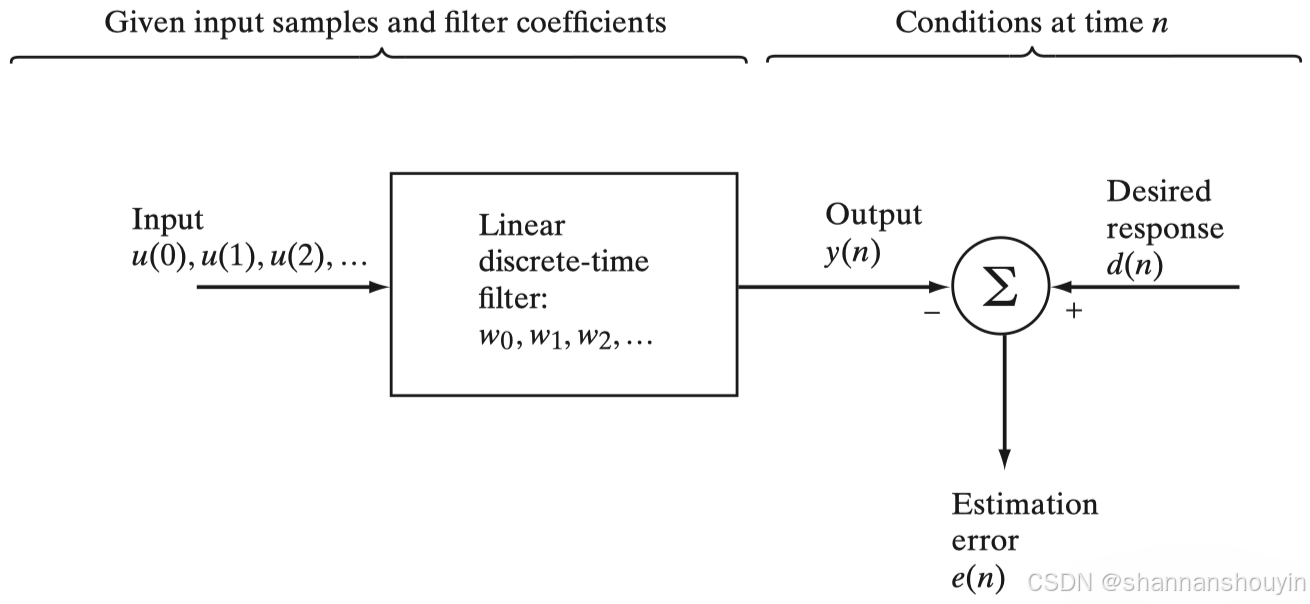
维纳滤波器(Wiener Filter)是一种处理离散信号的线性最优滤波器,它的设计目的是使输出信号与期望信号之间的均方误差(MSE)最小化。
输入信号为:
为期望响应,也就是在不含误差的情况下的理想输出,假设其均值为0(一般会对信号进行减去均值处理),即
;
为噪声,
是滤波器的输入,可以看作是我们实际测量得到的包含误差的原始数据。
输出信号为:
为维纳滤波器的系数(冲激响应),
为卷积符号,
为滤波器的输出,称为我们的估计量。滤波器系统框图如下:
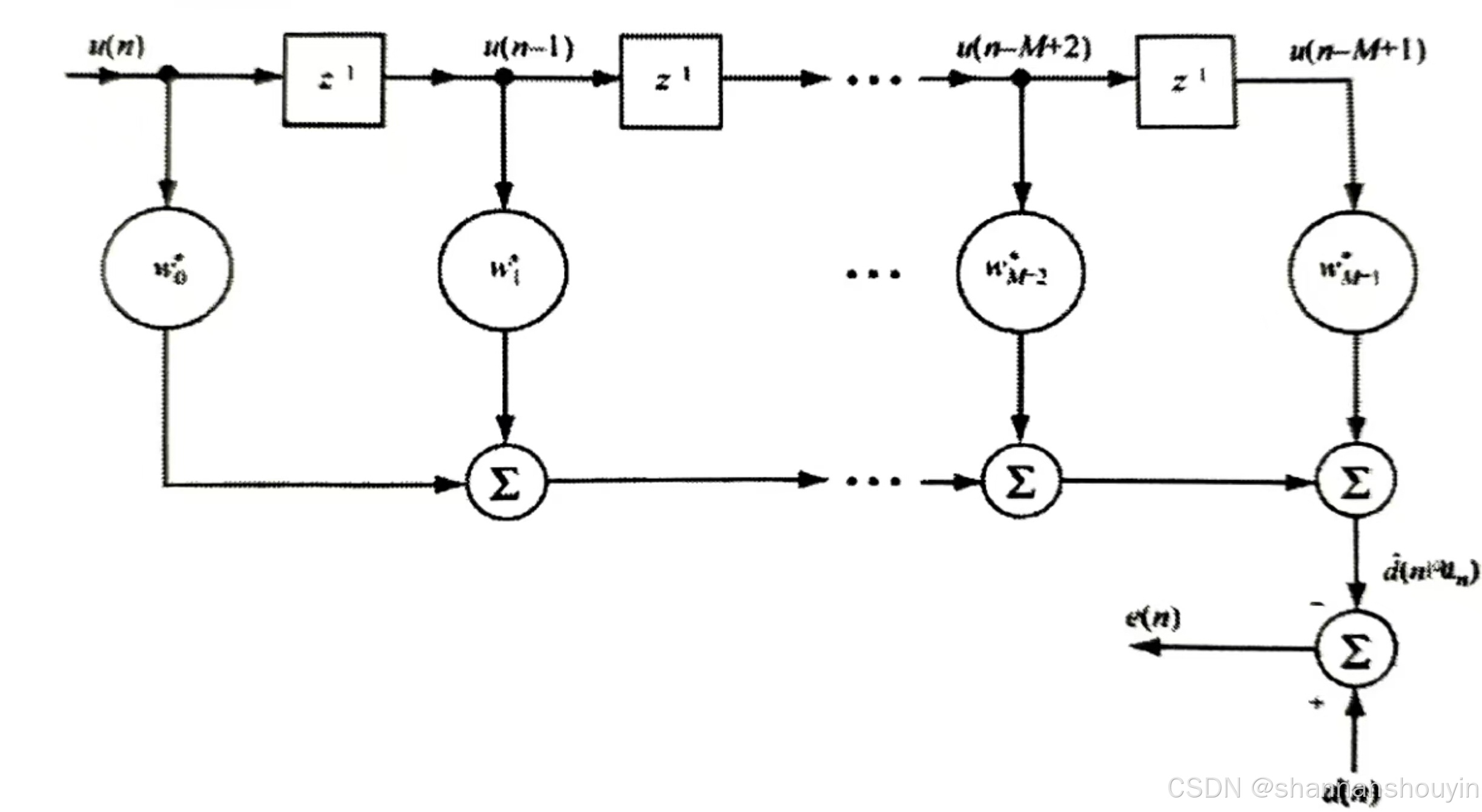
假设FIR滤波器有M阶,滤波器抽头系数为,输入为
,滤波器n时刻的输出可以写作:
n时刻滤波器的输出为滤波器冲激响应和滤波器输入的线性卷积,其中,k表示滤波器的第k阶抽头。我们讨论的信号是在复数域的,此时星号表示复共轭。FIR滤波器系统框图为:
1.2维纳滤波器目标
维纳滤波器的目标是找到线性最优的,使估计量
在均方误差意义下最大程度接近我们的期望响应
,以上述FIR滤波器为例,估计量与期望相应之差为:
基于均方误差,我们的目标误差函数为:
维纳滤波器的目标是使最小,我们需要找到是
时对应的滤波器系数
。
二、维纳-霍夫方程(Wiener-Hopf equation)推导
2.1维纳-霍夫方程推导
为了找到使滤波器输出均方误差最小的系数,首先将(2)带入(3)并展开,得:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









