







 CREST是一种首次将残差学习应用于目标跟踪的端到端模型,旨在克服光照变化、目标大小变化等影响,提升跟踪精度。通过深度学习框架,模型能自适应地优化和更新,残差映射补偿基本映射的误差,提高高斯响应图的质量,从而实现更精确的目标定位。
CREST是一种首次将残差学习应用于目标跟踪的端到端模型,旨在克服光照变化、目标大小变化等影响,提升跟踪精度。通过深度学习框架,模型能自适应地优化和更新,残差映射补偿基本映射的误差,提高高斯响应图的质量,从而实现更精确的目标定位。
不同于在目标检测和识别等领域取得的丰硕成果,深度学习在目标跟踪领域进展相对缓慢,
很大原因是缺乏数据——目标跟踪只有第一帧的标定框作为训练数据,在这种情况下训练一个深度模型十分困难。现有的基于深度学习的方法从几个不同的角度解决这个问题,但在跟踪速度和精度方面仍有很大的提升空间。
在目标追踪界泰斗、UC Merced 杨明玄教授的指导下,香港城市大学、阿德莱德大学、SenseNet的研究人员从深度学习的角度出发,提出了一种 端到端的跟踪模型,将 特征提取和响应生成融合在深度学习框架中,只采用单层卷积的端到端结构,就达到了利用深度特征的传统协同滤波器的效果。
在目标追踪界泰斗、UC Merced 杨明玄教授的指导下,香港城市大学、阿德莱德大学、SenseNet的研究人员从深度学习的角度出发,提出了一种 端到端的跟踪模型,将 特征提取和响应生成融合在深度学习框架中,只采用单层卷积的端到端结构,就达到了利用深度特征的传统协同滤波器的效果。
在此基础上,研究人员还引入残差学习来有效维持模型在目标运动中的预测性能,这也是残差学习的概念首次被用于目标跟踪领域。实验表明,新方法在标准的数据库中取得了state-of-the-art的精度效果。
1.目标跟踪
目标跟踪(Object Tracking)一直是计算机视觉中应用广泛而且富有挑战性的问题。简单说,目标跟踪就是在一段视频中,给定第一帧目标物体的位置和大小信息(标定框)后,让跟踪算法在后续的每一帧中对目标物体的位置和大小进行预测。
跟踪算法实时确定目标物体状态,为进一步智能分析提供了先决条件。目标跟踪技术在安防、人机交互和无人驾驶等一系列领域中都有应用。
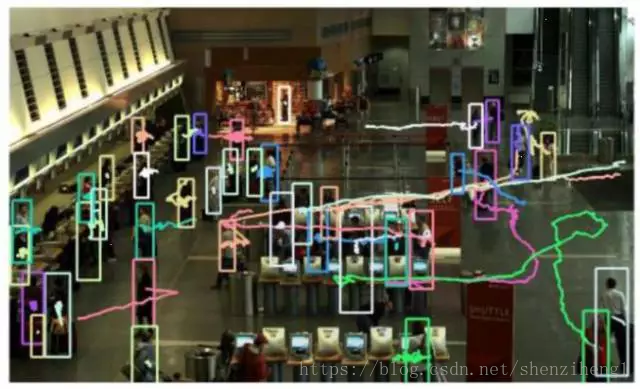
安防监控场景中行人跟踪和轨迹预测
在实际应用中,目标跟踪算法的效果受很多因素的制约,本质是由于物体在视频中出现的各种无法预测的变化。典型的制约因素包括:


物体在视频中从初始帧到当前帧,光照情况发生了剧烈的变化
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 745
745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









