










一、简介
Scikit-image 官方网站
使用建议:搜索想要了解的函数,会有非常详细的解释以及函数源码。
skimage(全称scikit-image):是一个基于 scipy 和 numpy 构建的,专注于图像处理和计算机视觉的Python库。提供了一系列用于图像处理函数,包括图像滤波、边缘检测、图像分割、特征提取、图像配准等。
scipy是一个基于 numpy 构建的,具有更广泛通用的数学计算和科学计算的Python库。提供了优化、信号处理、统计、线性代数、数值积分、插值、稀疏矩阵等领域的函数。- 优势:同时支持2D和3D图像处理(与单帧图像处理相比,极大降低耗时问题,但内存占比高)。相比于 OpenCV、Pillow、scipy 等专注于2D图像处理库,skimage 更加专业和全面。
二、安装
(1)pip 安装:pip install scikit-image
(2)conda 安装:conda install scikit-image
import skimage
print(skimage.__version__) # 打印版本号
# 使用命令行,查看版本号
python -c "import skimage; print(skimage.__version__)"
三、模块简介:API reference
skimage包由许多的子模块组成,各个子模块提供不同的功能。
"""
主要子模块列表如下:
(1)skimage.io 读取、保存和显示(图片或视频)
(2)skimage.data 提供一些测试图片和样本数据
(3)skimage.color 颜色空间转换 (如:rgb2gray、gray2rgb)
(4)skimage.draw 图形绘制 (如:线条、矩形、圆等)
(5)skimage.filters 图像过滤 (如:增强、降噪、边缘检测、纹理分析等)
(6)skimage.transform 几何变换 (如:修改图像尺寸、旋转、裁剪、仿射变换等)
(7)skimage.morphology 形态学操作 (如:腐蚀、膨胀、开闭运算等)
(8)skimage.exposure 强度调整 (如:亮度调整、直方图均衡等)
(9)skimage.feature 特征提取 (如:直方图、角点检测、模板匹配等)
(10)skimage.graph 图形结构 (如:最小生成树、连通性、骨架等)
(11)skimage.measure 属性测量 (如:相似性或等高线等)
(12)skimage.segmentation 图像分割 (将图像分成不同的部分或对象)
(13)skimage.restoration 图像恢复和去噪(如:去卷积、反卷积等)
(14)skimage.util 通用函数 (如:类型转换等)
"""
四、项目实战
4.1、2D图像处理
4.1.0、测试图像:skimage.data
from skimage import data
# 2D图像
camera = data.camera()
coins = data.coins()
brick = data.brick()
chessboard_GRAY = data.checkerboard()
# 3D图像
cat = data.cat()
chelsea = data.chelsea()
coffee = data.coffee()
astronaut = data.astronaut()
rocket = data.rocket()
retina = data.retina()
4.1.1、图像属性
import skimage
img = skimage.io.imread('image.jpg') # 读取图像
print("类型 =", type(img))
print("尺寸 =", img.shape)
print("高度 =", img.shape[0])
print("宽度 =", img.shape[1])
print("通道数 =", img.shape[2])
print("像素总个数 =", img.size)
print("最大像素值 =", img.max())
print("最小像素值 =", img.min())
print("像素平均值 =", img.mean())
4.1.2、读取 / 显示 / 保存图像:skimage.io.imread() + skimage.io.imshow() + skimage.io.imsave()
import skimage
img = skimage.io.imread('image.jpg') # 读取图像
skimage.io.imshow(img) # 显示图像
skimage.io.show() # 阻塞程序,以便图像可以正常显示。
skimage.io.imsave('image1.png', img) # 保存图像
4.1.3、颜色空间转换:skimage.color.rgba2rgb + skimage.color.rgb2gray()
JPEG (.jpg)
- 通常是三通道(RGB):主要使用红色、绿色和蓝色(RGB)三个通道来存储颜色信息。
- 不支持透明度:JPEG不具备Alpha通道,因此不支持透明背景。
- YCbCr色彩空间:在压缩过程中,JPEG图像通常使用YCbCr色彩空间,将图像分为亮度(Y)和两个色度分量(Cb、Cr),便于更高效的压缩。
- 单通道图像(灰度图像):JPEG格式可以存储单通道灰度图像,适用于只需黑白信息的情况。
PNG (.png)
- 通常是三通道(RGB)或四通道(RGBA):可以存储RGB三通道或包含Alpha通道的四通道(RGBA)图像。
- 支持透明度通道:与JPEG不同,PNG支持透明图像,因此常用于需要透明背景的图像场景。
- 双通道图像(灰度图像与Alpha通道):支持将灰度图像与Alpha通道结合,形成两通道(GA)图像。
- 单通道图像(灰度图像):PNG可以是单通道灰度图像,适用于黑白图像。
import skimage
import numpy as np
# (1)读取四通道图像RGBA=[245, 612, 4]
rgba = skimage.io.imread(r"F:\py\color_image.png")
# (2)若为三通道图像RGB =[245, 612, 3],则手动添加透明度(Alpha通道)
if rgba.shape[-1] == 3:
alpha = 1 # 透明度=0.5
# 创建 Alpha 通道 A=[245, 612, 1]
alpha_channel = np.full((rgba.shape[0], rgba.shape[1], 1), fill_value=int(255*alpha), dtype=np.uint8)
rgba = np.concatenate([rgba, alpha_channel], axis=-1) # 将 Alpha 通道与 RGB 图像合并,生成 RGBA 图像
# (3)颜色空间转换
rgb = skimage.color.rgba2rgb(rgba) # rgba转rgb
gray = skimage.color.rgb2gray(rgb) # rgb转gray
skimage.io.imshow(rgb) # 显示图像
skimage.io.show() # 阻塞程序,以便图像可以正常显示。
4.2、3D图像处理
4.2.1、相位一致性算法:skimage.feature.hessian_matrix() + skimage.feature.hessian_matrix_eigvals()
相位一致性(Phase Congruency, PC):在信号处理或系统分析中,保持信号或系统的相位信息在不同频率下保持不变的性质。
- 定义:在频率域分析中,信号(或图像)可以表示为幅度谱和相位谱。
频谱(频率谱):表示信号在不同频率上的强度。幅度谱(Amplitude Spectrum):表示信号在频率域上的振幅或幅度分布;相位谱(Phase Spectrum):表示信号在频率域上的相位信息; —— 决定了信号或图像的位置和特征的空间分布- 作用:在频域分析中,通常对信号进行傅里叶变换来获取其频谱,然后可以从频谱中提取相位谱和幅度谱。若不保持相位一致性,则频谱的相位信息被破坏,导致图像模糊、失真或者无法还原原始信号。
- 应用:图像配准、图像拼接和图像重建。
基于相位一致性的边缘检测
相位一致性算法步骤:
- (1)
归一化处理:将像素值归一化到0到1之间,以便后续计算的稳定性。- (2)
矩阵计算:对图像进行Hessian矩阵计算,获取每个像素点的Hessian矩阵。Hessian矩阵描述了图像的局部二阶导数信息,可以用于描述图像的曲率和边缘信息。- (3)
特征值计算:从Hessian矩阵中计算特征值和特征向量。特征值表示了Hessian矩阵在不同方向上的曲率,特征向量表示了对应于特征值的方向。在相位一致性算法中,我们主要关注特征值的大小。- (4)
相位一致性计算:通过对特征值的计算,得到每个像素点处的相位一致性值。相位一致性值反映了图像局部结构和纹理信息的一致性程度。边缘和纹理区域通常具有较高的相位一致性值,而平坦区域或噪声区域通常具有较低的相位一致性值。- (5)
后处理:根据相位一致性值进行一些后处理操作,如阈值化或非极大值抑制,以便进一步提取感兴趣的边缘和纹理特征。

import numpy as np
import tifffile
import napari
import time
from skimage.feature import hessian_matrix, hessian_matrix_eigvals, canny
from skimage.filters import median
def phase_congruency(image, k=2.0, f=2.0):
image = median(image)
edges = np.zeros_like(image)
for i in range(image.shape[0]):
edges[i] = canny(image[i], low_threshold=50, high_threshold=200)
start_time = time.time() # 记录开始时间
#######################################################
H = hessian_matrix(image, sigma=2.0, mode='reflect')
eigvals = hessian_matrix_eigvals(H)
#######################################################
end_time = time.time() # 记录结束时间
runtime = end_time - start_time # 计算运行时间
print(runtime)
lambda1 = eigvals[0, ...] * -1 # First eigenvalue
lambda2 = eigvals[1, ...] * -1 # Second eigenvalue
lambda3 = eigvals[2, ...] * -1 # Third eigenvalue
phase_congruency = np.sqrt(lambda1 ** 2 + lambda2 ** 2 + lambda3 ** 2) / (np.abs(lambda1) + np.abs(lambda2) + np.abs(lambda3))
# Enhance edges using Canny result for each slice
pc_image = phase_congruency*0.5 + (edges)
pc = pc_image ** k * f
return pc
def main():
image_path = r'SampleImage.tif'
image = tifffile.imread(image_path)
image = image.astype(np.float32)
image /= np.max(image)
pc_image = phase_congruency(image)
viewer = napari.Viewer()
viewer.add_image(pc_image, name='Phase Congruency', colormap='gray')
viewer.add_image(image, name='raw Image', colormap='gray')
napari.run()
if __name__ == '__main__':
main()
"""##################################################################################################
函数作用:用于计算图像局部二阶导数的方法,得到图像的Hessian矩阵。Hessian矩阵可用于检测图像中的特定结构,如边缘、角点和斑点等。
函数说明:H = skimage.feature.hessian_matrix(image, sigma=1.0, order='rc')
输入参数:
(1)image:输入的灰度图像。该图像必须是二维的(单通道)。
(2)sigma:用于控制高斯滤波的标准差,影响图像平滑效果。默认值为1.0。
- 较小的sigma值会使高斯滤波器的响应更加锐利,可以提取细节特征,但同时也会增加噪声的敏感性。
- 较大的sigma值会使高斯滤波器的响应更加平滑,可以提取更大尺度的特征,但可能会导致细节丢失。
(3)order:表示输出的Hessian矩阵的排列顺序。
'rc':按照rc(row-major, 行主)顺序排列,即按行优先排列。
'xy':按照xy顺序排列,即按照x和y方向的导数排列。
输出参数:
H:图像的Hessian矩阵。对于二维图像,输出是一个形状为(2, 2, M, N)的数组,其中M和N是输入图像的高度和宽度。
##################################################################################################
函数作用:用于计算图像的Hessian矩阵的特征值(Eigenvalues),特征值是Hessian矩阵的特征向量对应的值,可以用于描述图像局部结构的特性。
函数说明:Eigenvalues = skimage.feature.hessian_matrix_eigvals(H)
输入参数: H:图像的Hessian矩阵。———— 对于二维图像,H是一个形状为(2, 2, M, N)的数组,其中M和N是输入图像的高度和宽度。
输出参数: Hessian矩阵的特征值数组。———— 对于每个像素,输出是一个形状为(2, M, N)的数组,其中M和N是输入图像的高度和宽度。
Eigenvalues[0]对应第一个特征值,Eigenvalues[1]对应第二个特征值。
##################################################################################################"""
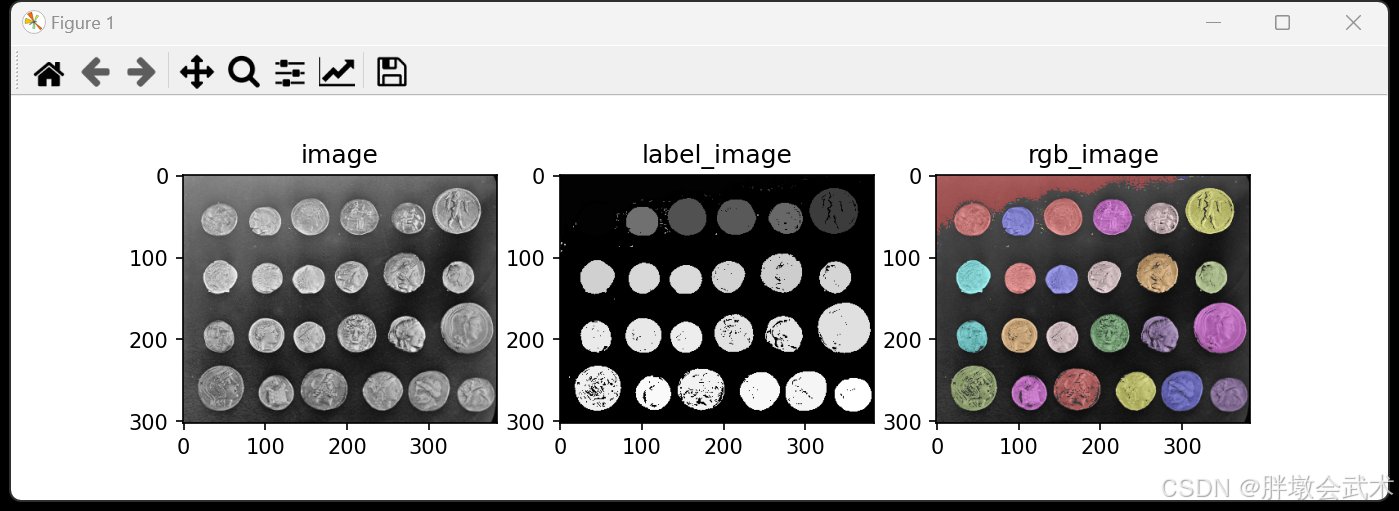
4.2.2、连通区域算法:skimage.filters.threshold_otsu() + skimage.measure.label() + skimage.measure.regionprops()
import matplotlib.pyplot as plt
from skimage import data, filters, measure, color
# (1)加载示例图像(硬币图像)
image = data.coins()
# (2)图像处理
thresh_value = filters.threshold_otsu(image) # 使用Otsu方法计算全局阈值
binary_image = image > thresh_value # 生成二值图像(大于阈值的像素为前景,小于阈值的为背景)
label_image = measure.label(binary_image) # 对二值图像进行标签标记
regions = measure.regionprops(label_image) # 使用regionprops函数提取标记区域的属性
print(f"thresh_value = {thresh_value}")
# (3)输出每个区域的属性
for region in regions:
print(f"Region {region.label}:")
print(f" - Area: {region.area}")
print(f" - Bounding Box: {region.bbox}")
print(f" - Centroid: {region.centroid}")
# (4)可视化结果
plt.subplot(131), plt.imshow(image, 'gray'), plt.title('image')
plt.subplot(132), plt.imshow(label_image, 'gray'), plt.title('label_image')
plt.subplot(133), plt.imshow(color.label2rgb(label_image, image=image, bg_label=0)), plt.title('rgb_image')
plt.show()
# color.label2rgb(label_image, image=image, bg_label=0): 用于将标记图像转换为伪彩色图像
# (将每个标记区域以不同颜色显示,并且可以叠加在原始灰度图像上进行对比。)
"""###########################################################################
函数介绍:大津阈值法 - 根据图像的直方图自适应获取最佳的二值化阈值(前景+背景)
函数说明:threshold = skimage.filters.threshold_otsu(image, nbins=256)
输入参数:
image:待阈值处理的输入图像。可以是灰度图像或多通道图像。灰度图像将直接使用,多通道图像会首先转换为灰度图像。
nbins:(可选参数)用于指定图像直方图的 bin 数量,默认为 256。增加 bin 数量可能会更准确地计算阈值,但会增加计算开销。
输出参数:
threshold:计算得到的 Otsu 阈值,用于对输入图像进行二值化处理。
###########################################################################
函数介绍:连通区域标记 - 对二值化图像的每个连通区域进行唯一标记,并用不同的整数值表示。
函数说明:labeled_image, num_labels = skimage.measure.label(image, connectivity=1, return_num=True)
输入参数:
image:输入的二值化图像。其像素值只有 True 或 False,表示图像的前景和背景。
connectivity:(可选参数)用于指定连通区域的连接方式。默认为 1,表示使用 4 连通(4-connectivity),即上下左右四个方向相邻的像素被认为是连通的。可以设置为 2,表示使用 8 连通(8-connectivity),即包括对角线方向的像素。
return_num:(可选参数)控制是否返回连通区域的数量。默认为 False,不返回。如果设置为 True,将返回连通区域的数量。
输出参数:
labeled_image:连通区域标记后的图像
num_labels:如果设置了 return_num=True,将返回连通区域的数量。
###########################################################################
函数介绍:属性计算 - 获取连通区域的属性:面积 + 周长 + 重心 + 边界框。
函数说明:props = skimage.measure.regionprops(label_image, intensity_image=None, cache=True)
输入参数:
label_image:连通区域标记后的图像,通常是通过 skimage.measure.label() 函数得到的标记图像。
intensity_image:(可选参数)输入的原始图像(灰度图像或彩色图像),用于计算连通区域的强度相关属性。默认为 None,表示不计算强度属性。
cache:(可选参数)控制是否缓存标记图像。默认为 True,表示对标记图像进行缓存,以便后续的处理。如果设置为 False,则每次调用 regionprops 函数时都会重新计算标记图像。
输出参数:
regions:一个包含连通区域属性的列表。每个连通区域都对应一个字典,其中包含了该区域的各种属性。
获取属性:
for region in regions:
label = region.label 区域的唯一标签或标识符。用于标识不同的连通区域。
image = region.image 区域的像素值掩码,通常是一个与原始图像相同大小的布尔数组,True表示该区域非零值。
bbox = region.bbox 表示区域边界框的坐标范围(min_slice, min_row, min_col, max_slice, max_row, max_col)
coords = region.coords 区域内非零像素的坐标列表。
centroid = region.centroid 区域的中心点坐标(centroid_slice, centroid_row, centroid_col)
perimeter = region.perimeter 区域的周长。
area = region.area 区域的面积,表示区域内非零像素的数量。
convex_area = region.convex_area 区域的凸包面积。
equivalent = region.equivalent_diameter与区域相同面积的圆的直径。
orientation = region.orientation 区域的主要轴的方向。
major = region.major_axis_length 区域的主要轴的长度。
minor = region.minor_axis_length 区域的次要轴的长度。
moments = region.moments 区域的矩属性,用于计算区域的矩,包括一阶矩、二阶矩、中心矩、归一化矩等。
eccentricity= region.eccentricity 区域的离心率,表示区域的形状。
solidity = region.solidity 区域的实心度,表示区域内部像素占整个凸包的比例。
###########################################################################"""
4.2.3、调整图像尺寸(缩放+插值):skimage.transform.resize()
若order=0(最近邻插值),则输出图像中的每个像素都是原始图像中最近邻像素的值,没有使用插值。
import numpy as np
from skimage import transform
import time
original_image = np.random.random((100, 200, 300)) # 随机生成示例数据
target_size = (200, 400, 600) # 设置目标长宽高
###############################################
# order阶数越高,精度越高,但耗时越长。
###############################################
for ii in range(6):
t = time.time()
# 调整图像: 缩放+插值
resized_image = transform.resize(original_image, target_size, mode='constant', cval=0, order=ii)
print("总共耗时:", time.time() - t)
print("原始图像 =", original_image.shape)
print("缩放图像 =", resized_image.shape)
"""
原始图像 = (100, 200, 300)
缩放图像 = (200, 400, 600)
总共耗时: 0.3540208339691162
总共耗时: 2.0999197959899902
总共耗时: 4.99407434463501
总共耗时: 10.33707880973816
总共耗时: 19.263009786605835
总共耗时: 32.0386061668396
"""
"""##############################################################################################################
函数说明:skimage.transform.resize(image, output_shape, mode='reflect', cval=0, order=1, clip=True,
preserve_range=False, anti_aliasing=None, anti_aliasing_sigma=None)
输入参数:
(1)image:待调整大小的输入图像。
2D图像 = (height, width);
3D图像 = (depth, height, width)。
(2)output_shape:目标输出图像的大小。
2D图像 = (new_height, new_width);
3D图像 = (new_depth, new_height, new_width)。
(3)mode(可选):插值方法。
'constant': 在图像边界外使用常数值填充。
'edge': 在图像边界外使用图像边缘像素值填充。
'symmetric': 在图像边界外使用图像的对称像素值填充。
'reflect': 在图像边界外使用图像的镜像像素值填充。
'wrap': 在图像边界外使用图像的环绕像素值填充。
(4)cval(可选):当mode='constant'时使用,指定填充的常数值(默认0)。
(5)order(可选):插值阶数(默认1)。阶数越高,精度越高,但耗时越长。
0: 最近邻插值(Nearest-neighbor)
特点:选择离目标像素最近的一个原始像素作为插值结果。
优点:速度快、计算简单;
缺点:会产生块状(马赛克)效果,图像边缘不平滑。
1: 双线性插值(Bi-linear)
特点:利用目标像素周围 2×2 个像素的线性加权平均计算插值结果。
优点:计算速度较快,生成的图像比最近邻更平滑;
缺点:细节表现一般,可能会出现轻微的模糊。
2: 双二次插值(Bi-quadratic)
特点:使用 3×3 邻域内的像素通过二次多项式拟合进行插值。
优点:在保持较高平滑度的同时能改善细节;
缺点:计算量比双线性略大,效果不如双三次常见。
3: 双三次插值(Bi-cubic)
特点:采用 4×4 邻域像素,通过三次多项式插值计算结果。
优点:能较好地平衡图像平滑度与细节保留,是较为常用且效果优良的插值方法;
缺点:计算量较双线性大,处理速度稍慢。
4: 双四次插值(Bi-quartic)
特点:使用较大邻域(例如 5×5)并采用四次多项式进行插值。
优点:能获得更高的平滑度和连续性;
缺点:计算复杂度进一步增加,处理速度较慢,且在某些情况下可能过于平滑。
5: 双五次插值(Bi-quintic)
特点:使用更大邻域(例如 6x6)并采用五次多项式进行插值。
优点:在理论上能够更准确地重构连续图像;
缺点:计算量大,处理速度慢,而且过高阶的插值有时可能引入不必要的过渡效果。
(6)clip(可选): 指定是否将输出图像剪裁到指定输出范围内(默认True)。如:将输出图像限制在0到1之间。
(7)preserve_range(可选): 指定是否保持图像数据类型的范围。True表示输出图像保持与原始图像的数据类型。False表示输出图像为浮点数类型(float64)。
(8)anti_aliasing(可选): 指定是否启用抗锯齿处理。True表示将应用抗锯齿过滤器来减少下采样导致的混叠效应。
(9)anti_aliasing_sigma(可选): 指定抗锯齿过滤器的标准差 [默认0.01 * max(new_shape)]。如果anti_aliasing设置为True,则该参数用于指定抗锯齿过滤器的标准差。
输出参数:
返回调整后的图像。
##############################################################################################################
请注意:
(1)skimage.transform.resize函数通常用于简单的插值操作。对于更复杂的3D图像处理任务,可能需要使用其他库,如SimpleITK、ITK或PyTorch等。
(2)order阶数越高,精度越高,但耗时越长。
##############################################################################################################"""



















 3955
3955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











