









Flow-GRPO:将在线强化学习融入Flow Matching模型的创新
近年来,Flow Matching模型因其在图像生成领域的强大性能和理论基础而备受关注。然而,在处理复杂场景(如多物体、属性和关系的组合)以及文本渲染任务时,这些模型仍面临挑战。与此同时,在线强化学习(RL),特别是Group Relative Policy Optimization(GRPO),已在提升大语言模型推理能力方面展现出显著效果。论文《Flow-GRPO: Training Flow Matching Models via Online RL》首次将在线RL(具体为GRPO)与Flow Matching模型结合,提出了Flow-GRPO方法,显著提升了文本到图像(T2I)生成任务的表现。本文将面向熟悉Flow Matching和GRPO的读者,介绍Flow-GRPO的贡献、结合方式、解决的关键问题以及核心数学公式。
Paper: https://arxiv.org/pdf/2505.05470
Flow-GRPO的主要贡献
Flow-GRPO的贡献可以总结为以下三点:
-
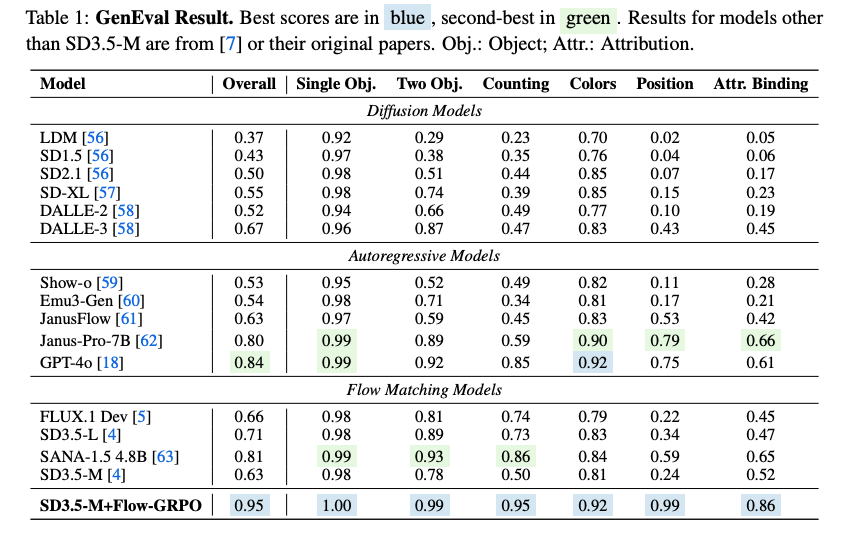
首次将GRPO引入Flow Matching模型:通过将确定性的ODE(常微分方程)采样转换为SDE(随机微分方程)采样,Flow-GRPO克服了Flow Matching模型的确定性限制,使在线RL能够应用于T2I任务。实验表明,Flow-GRPO将Stable Diffusion 3.5 Medium(SD3.5-M)在GenEval基准上的准确率从63%提升至95%,超越了GPT-4o的性能。
-
去噪步骤减少策略:Flow-GRPO提出了一种Denoising Reduction策略,在训练时减少去噪步骤(从40步降至10步),而在推理时保留完整去噪步骤(40步)。这显著提高了训练效率,同时保持了推理时的图像质量。
-
KL约束防止奖励黑客:通过引入Kullback-Leibler(KL)散度约束,Flow-GRPO有效避免了奖励黑客(reward hacking)现象,即奖励提升但图像质量或多样性下降。实验表明,适当的KL正则化能够在保持任务性能的同时,维护图像质量和生成多样性。
Flow Matching与GRPO的结合方式
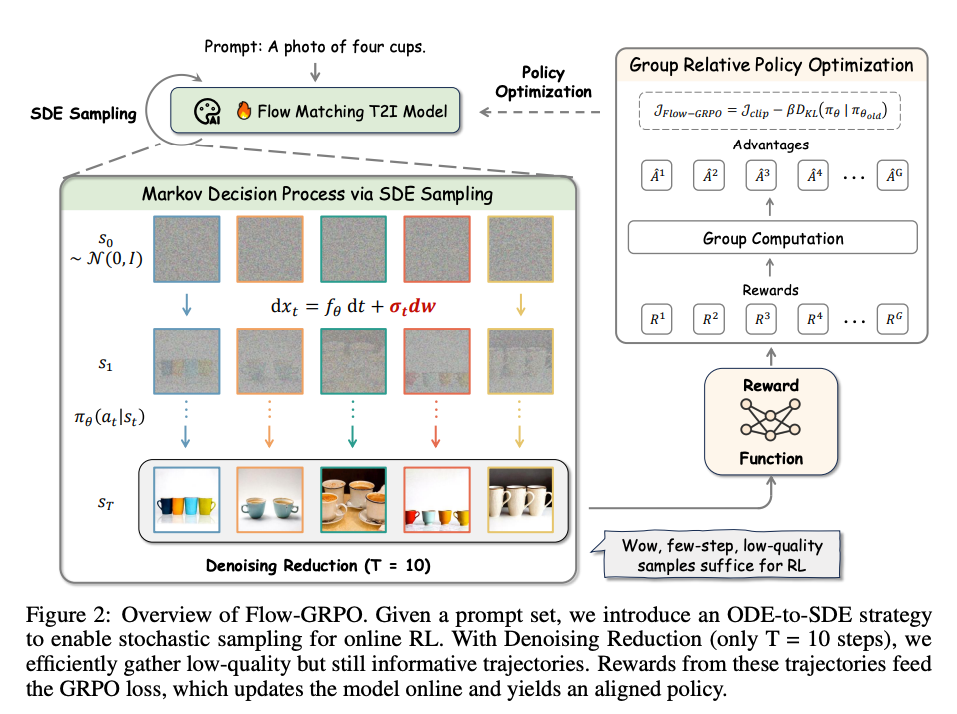
Flow Matching模型通过学习连续时间归一化流的向量场,实现高效的确定性采样。GRPO是一种轻量级在线RL算法,通过组内奖励归一化估计优势(advantage),避免了传统PPO算法中需要额外值函数网络的开销。Flow-GRPO将两者结合,核心思想是将Flow Matching的去噪过程建模为一个马尔可夫决策过程(MDP),并利用GRPO优化生成策略,使其最大化特定任务的奖励(如GenEval的准确率或PickScore的人类偏好分数)。
结合的具体步骤
-
去噪过程建模为MDP:论文将Flow Matching的去噪过程定义为一个MDP,其中:
- 状态 ( s t = ( c , t , x t ) s_t = (c, t, x_t) st=(c,t,xt) ),包括提示词 ( c c c )、时间步 ( t t t ) 和当前噪声样本 ( x t x_t xt )。
- 动作 ( a t = x t − 1 a_t = x_{t-1} at=xt−1 ),为网络预测的去噪样本。
- 策略 ( π ( a t ∣ s t ) = p θ ( x t − 1 ∣ x t , c ) \pi(a_t | s_t) = p_\theta(x_{t-1} | x_t, c) π(at∣st)=pθ(xt−1∣xt,c) ),为条件概率模型。
- 奖励仅在最后一步非零:( R ( s t , a t ) = r ( x 0 , c ) R(s_t, a_t) = r(x_0, c) R(st,at)=r(x0,c) )(当 ( t = 0 t=0 t=0 ) 时),否则为0。
-
GRPO优化:Flow-GRPO基于GRPO框架,优化以下正则化目标:
max θ E ( s 0 , a 0 , … , s T , a T ) ∼ π θ [ ∑ t = 0 T ( R ( s t , a t ) − β D K L ( π θ ( ⋅ ∣ s t ) ∥ π ref ( ⋅ ∣ s t ) ) ) ] \max_\theta \mathbb{E}_{\left(s_0, a_0, \ldots, s_T, a_T\right) \sim \pi_\theta}\left[\sum_{t=0}^T\left(R(s_t, a_t) - \beta D_{\mathrm{KL}}\left(\pi_\theta(\cdot | s_t) \| \pi_{\text{ref}}(\cdot | s_t)\right)\right)\right] θmaxE(s0,a0,…,sT,aT)∼πθ[t=0∑T(R(st,at)−βDKL(πθ(⋅∣st)∥πref(⋅∣st)))]
其中,( β \beta β ) 控制KL散度正则化强度,( π ref \pi_{\text{ref}} πref ) 为参考策略(通常为预训练模型)。GRPO通过组内奖励归一化计算优势:
A ^ t i = R ( x 0 i , c ) − mean ( { R ( x 0 i , c ) } i = 1 G ) std ( { R ( x 0 i , c ) } i = 1 G ) \hat{A}_t^i = \frac{R(x_0^i, c) - \text{mean}(\{R(x_0^i, c)\}_{i=1}^G)}{\text{std}(\{R(x_0^i, c)\}_{i=1}^G)} A^ti=std({R(x0i,c)}i=1G)R(x0i,c)−mean({R(x0i,c)}i=1G)
最终优化目标为:
F Flow-GRPO ( θ ) = E c ∼ C , { x i } i = 1 G ∼ π θ old ( ⋅ ∣ c ) [ 1 G ∑ i = 1 G 1 T ∑ t = 0 T − 1 ( min ( r t i ( θ ) A ^ t i , clip ( r t i ( θ ) , 1 − ε , 1 + ε ) A ^ t i ) − β D K L ( π θ ∥ π ref ) ) ] \mathcal{F}_{\text{Flow-GRPO}}(\theta) = \mathbb{E}_{c \sim \mathcal{C}, \{x^i\}_{i=1}^G \sim \pi_{\theta_{\text{old}}}(\cdot | c)} \left[ \frac{1}{G} \sum_{i=1}^G \frac{1}{T} \sum_{t=0}^{T-1} \left( \min \left( r_t^i(\theta) \hat{A}_t^i, \text{clip}(r_t^i(\theta), 1-\varepsilon, 1+\varepsilon) \hat{A}_t^i \right) - \beta D_{\mathrm{KL}}(\pi_\theta \| \pi_{\text{ref}}) \right) \right] FFlow-GRPO(θ)=Ec∼C,{xi}i=1G∼πθold(⋅∣c)[G1i=1∑GT1t=0∑T−1(min(rti(θ)A^ti,clip(rti(θ),1−ε,1+ε)A^ti)−βDKL(πθ∥πref))]
其中,( r t i ( θ ) = p θ ( x t − 1 i ∣ x t i , c ) p θ old ( x t − 1 i ∣ x t i , c ) r_t^i(\theta) = \frac{p_\theta(x_{t-1}^i | x_t^i, c)}{p_{\theta_{\text{old}}}(x_{t-1}^i | x_t^i, c)} rti(θ)=pθold(xt−1i∣xti,c)pθ(xt−1i∣xti,c) )。 -
核心策略:
- ODE-to-SDE转换:为引入随机性以支持RL探索,Flow-GRPO将确定性ODE采样转换为等效的SDE采样,保持边际分布一致。
- Denoising Reduction:训练时使用较少的去噪步骤(( T = 10 T=10 T=10 )),推理时使用完整步骤(( T = 40 T=40 T=40 )),加速数据收集。
解决的关键问题
将GRPO应用于Flow Matching模型面临两大挑战:
-
确定性与随机性的冲突:
- 问题:Flow Matching依赖确定性ODE采样(公式如下),无法提供RL所需的随机探索和概率计算:
d x t = v t d t \mathrm{d} \boldsymbol{x}_t = \boldsymbol{v}_t \mathrm{d} t dxt=vtdt
其中,( v t \boldsymbol{v}_t vt ) 为通过Flow Matching目标学习的向量场(就是下面的 v v v):
L ( θ ) = E t , x 0 ∼ X 0 , x 1 ∼ X 1 [ ∥ v − v θ ( x t , t ) ∥ 2 ] \mathcal{L}(\theta) = \mathbb{E}_{t, x_0 \sim X_0, x_1 \sim X_1} \left[ \left\| v - v_\theta(\boldsymbol{x}_t, t) \right\|^2 \right] L(θ)=Et,x0∼X0,x1∼X1[∥v−vθ(xt,t)∥2]
确定性采样(如欧拉法)生成单一轨迹,无法计算 ( p ( x t − 1 ∣ x t , c ) p(x_{t-1} | x_t, c) p(xt−1∣xt,c) ),也缺乏探索多样性。 - 解决方案:Flow-GRPO通过ODE-to-SDE转换引入随机性,构造等效SDE:
d x t = ( v t ( x t ) − σ t 2 2 ∇ log p t ( x t ) ) d t + σ t d w \mathrm{d} \boldsymbol{x}_t = \left( \boldsymbol{v}_t(\boldsymbol{x}_t) - \frac{\sigma_t^2}{2} \nabla \log p_t(\boldsymbol{x}_t) \right) \mathrm{d} t + \sigma_t \mathrm{d} \boldsymbol{w} dxt=(vt(xt)−2σt2∇logpt(xt))dt+σtdw
其中,( d w \mathrm{d} \boldsymbol{w} dw ) 为维纳过程增量,( σ t \sigma_t σt ) 控制随机性。关键在于计算边际分数 ( ∇ log p t ( x t ) \nabla \log p_t(\boldsymbol{x}_t) ∇logpt(xt) ),对于Rectified Flow,论文推导:
∇ log p t ( x ) = − x t − 1 − t t v t ( x ) \nabla \log p_t(\boldsymbol{x}) = -\frac{\boldsymbol{x}}{t} - \frac{1-t}{t} \boldsymbol{v}_t(\boldsymbol{x}) ∇logpt(x)=−tx−t1−tvt(x)
代入后得到最终SDE:
d x t = [ v t ( x t ) + σ t 2 2 t ( x t + ( 1 − t ) v t ( x t ) ) ] d t + σ t d w \mathrm{d} \boldsymbol{x}_t = \left[ \boldsymbol{v}_t(\boldsymbol{x}_t) + \frac{\sigma_t^2}{2 t} \left( \boldsymbol{x}_t + (1-t) \boldsymbol{v}_t(\boldsymbol{x}_t) \right) \right] \mathrm{d} t + \sigma_t \mathrm{d} \boldsymbol{w} dxt=[vt(xt)+2tσt2(xt+(1−t)vt(xt))]dt+σtdw
使用Euler-Maruyama离散化,更新规则为:
x t + Δ t = x t + [ v θ ( x t , t ) + σ t 2 2 t ( x t + ( 1 − t ) v θ ( x t , t ) ) ] Δ t + σ t Δ t ϵ \boldsymbol{x}_{t+\Delta t} = \boldsymbol{x}_t + \left[ \boldsymbol{v}_\theta(\boldsymbol{x}_t, t) + \frac{\sigma_t^2}{2 t} \left( \boldsymbol{x}_t + (1-t) \boldsymbol{v}_\theta(\boldsymbol{x}_t, t) \right) \right] \Delta t + \sigma_t \sqrt{\Delta t} \epsilon xt+Δt=xt+[vθ(xt,t)+2tσt2(xt+(1−t)vθ(xt,t))]Δt+σtΔtϵ
其中,( ϵ ∼ N ( 0 , I ) \epsilon \sim \mathcal{N}(0, \boldsymbol{I}) ϵ∼N(0,I) )。此过程使策略 ( π θ ( x t − 1 ∣ x t , c ) \pi_\theta(x_{t-1} | x_t, c) πθ(xt−1∣xt,c) ) 成为各向同性高斯分布,KL散度可闭式计算:
D K L ( π θ ∥ π ref ) = Δ t 2 ( σ t ( 1 − t ) 2 t + 1 σ t ) 2 ∥ v θ ( x t , t ) − v ref ( x t , t ) ∥ 2 D_{\mathrm{KL}}(\pi_\theta \| \pi_{\text{ref}}) = \frac{\Delta t}{2} \left( \frac{\sigma_t (1-t)}{2 t} + \frac{1}{\sigma_t} \right)^2 \left\| \boldsymbol{v}_\theta(\boldsymbol{x}_t, t) - \boldsymbol{v}_{\text{ref}}(\boldsymbol{x}_t, t) \right\|^2 DKL(πθ∥πref)=2Δt(2tσt(1−t)+σt1)2∥vθ(xt,t)−vref(xt,t)∥2
- 问题:Flow Matching依赖确定性ODE采样(公式如下),无法提供RL所需的随机探索和概率计算:
-
采样效率低:
- 问题:Flow Matching模型通常需要多次去噪迭代(例如40步),导致在线RL的数据收集成本高昂,尤其是对于大型模型。
- 解决方案:Denoising Reduction策略在训练时使用较少去噪步骤(( T = 10 T=10 T=10 )),实验表明这不会显著影响奖励优化,而推理时仍使用完整步骤以保证图像质量。这实现了约4倍的训练加速。
数学公式解释
以下是对核心公式的深入解释:
-
Flow Matching目标:
L ( θ ) = E t , x 0 ∼ X 0 , x 1 ∼ X 1 [ ∥ v − v θ ( x t , t ) ∥ 2 ] \mathcal{L}(\theta) = \mathbb{E}_{t, x_0 \sim X_0, x_1 \sim X_1} \left[ \left\| v - v_\theta(\boldsymbol{x}_t, t) \right\|^2 \right] L(θ)=Et,x0∼X0,x1∼X1[∥v−vθ(xt,t)∥2]
其中,( v = x 1 − x 0 v = x_1 - x_0 v=x1−x0 ),( x t = ( 1 − t ) x 0 + t x 1 x_t = (1-t) x_0 + t x_1 xt=(1−t)x0+tx1 )。此目标通过回归目标速度场 ( v v v ) 训练模型,使其学习从噪声 ( x 1 x_1 x1 ) 到数据的连续变换。 -
ODE-to-SDE转换:
- 确定性ODE:( d x t = v t d t \mathrm{d} \boldsymbol{x}_t = \boldsymbol{v}_t \mathrm{d} t dxt=vtdt ),生成单一轨迹。
- 目标SDE需保持相同边际分布,满足Fokker-Planck方程:
∂ t p t ( x ) = − ∇ ⋅ [ f SDE p t ( x ) ] + 1 2 ∇ 2 [ σ t 2 p t ( x ) ] \partial_t p_t(\boldsymbol{x}) = -\nabla \cdot \left[ f_{\text{SDE}} p_t(\boldsymbol{x}) \right] + \frac{1}{2} \nabla^2 \left[ \sigma_t^2 p_t(\boldsymbol{x}) \right] ∂tpt(x)=−∇⋅[fSDEpt(x)]+21∇2[σt2pt(x)]
与ODE的边际演化匹配:
∂ t p t ( x ) = − ∇ ⋅ [ v t p t ( x ) ] \partial_t p_t(\boldsymbol{x}) = -\nabla \cdot \left[ \boldsymbol{v}_t p_t(\boldsymbol{x}) \right] ∂tpt(x)=−∇⋅[vtpt(x)]
推导得到SDE的漂移项:
f SDE = v t − 1 2 σ t 2 ∇ log p t ( x ) f_{\text{SDE}} = \boldsymbol{v}_t - \frac{1}{2} \sigma_t^2 \nabla \log p_t(\boldsymbol{x}) fSDE=vt−21σt2∇logpt(x)
结合Rectified Flow的边际分数:
∇ log p t ( x ) = − x t − 1 − t t v t ( x ) \nabla \log p_t(\boldsymbol{x}) = -\frac{\boldsymbol{x}}{t} - \frac{1-t}{t} \boldsymbol{v}_t(\boldsymbol{x}) ∇logpt(x)=−tx−t1−tvt(x)
最终SDE如前所述,离散化后支持随机采样。
-
GRPO目标:
GRPO通过剪切目标和KL正则化优化策略,核心公式中,优势 ( A ^ t i \hat{A}_t^i A^ti ) 通过组内奖励归一化估计,剪切比率 ( r t i ( θ ) r_t^i(\theta) rti(θ) ) 确保稳定更新,KL项防止模型偏离预训练权重。
实验结果与意义
Flow-GRPO在三个任务上表现出色:
- 组合图像生成:在GenEval上,准确率从63%提升至95%,在未见物体和计数任务中展现出强大泛化能力。
- 视觉文本渲染:文本准确率从59%提升至92%。
- 人类偏好对齐:PickScore从21.72提升至23.31,图像质量和多样性得以保持。
这些结果表明,Flow-GRPO不仅提升了任务性能,还通过KL约束有效避免了奖励黑客,确保了图像质量和多样性。Denoising Reduction策略显著降低了训练成本,为在线RL在生成模型中的应用提供了实用性。
未来展望
Flow-GRPO的成功为在线RL在生成模型中的应用开辟了新方向。未来可探索:
- 视频生成:将Flow-GRPO扩展到视频生成,需设计适合视频的奖励模型并优化多目标平衡。
- 更高效的采样:进一步优化去噪步骤或探索自适应步长策略。
- 多模态应用:将方法推广到文本到语音或其他模态生成任务。
总之,Flow-GRPO通过创新性地结合Flow Matching和GRPO,解决了确定性与随机性冲突及采样效率低的问题,为生成模型的强化学习优化提供了新的范式。
代码
请注意代码请参考原作者的github开源代码!!!
Code:https://github.com/yifan123/flow_grpo
这里只是抛砖引玉,读者当作伪代码看即可。
复现《Flow-GRPO: Training Flow Matching Models via Online RL》中的训练代码需要实现以下核心组件:1) Flow Matching模型(以Stable Diffusion 3.5 Medium为基础);2) ODE-to-SDE转换以引入随机性;3) Denoising Reduction策略;4) GRPO优化过程。由于论文基于SD3.5-M并使用了LoRA微调,我们将提供一个简化的Python训练代码示例,使用PyTorch和Hugging Face的diffusers库,结合GRPO优化逻辑。代码将聚焦于复现论文中描述的Flow-GRPO训练流程,针对GenEval任务(Compositional Image Generation)。
以下假设:
- 使用
diffusers中的SD3.5-M模型作为基础。 - 实现ODE-to-SDE采样和Denoising Reduction。
- 使用简化的GenEval奖励函数(基于对象计数)。
- 由于完整实现需要大量计算资源(论文使用24个NVIDIA A800 GPU),代码将提供核心逻辑,需在高性能环境中运行。
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.distributions import Normal
from diffusers import StableDiffusionPipeline
from transformers import CLIPTextModel, CLIPTokenizer
import numpy as np
from peft import LoraConfig, get_peft_model
import uuid
import logging
from dataclasses import dataclass
from typing import List, Tuple
import asyncio
import platform
# 配置日志
logging.basicConfig(level=logging.INFO)
logger = logging.getLogger(__name__)
# 超参数配置(参考论文Appendix B.2)
@dataclass
class Config:
batch_size: int = 24 # 组大小G=24
train_timesteps: int = 10 # 训练时T=10
eval_timesteps: int = 40 # 推理时T=40
noise_level: float = 0.7 # 噪声水平a=0.7
kl_beta: float = 0.004 # KL正则化系数(GenEval任务)
clip_eps: float = 0.2 # GRPO剪切范围
lora_alpha: int = 64
lora_rank: int = 32
learning_rate: float = 1e-4
max_epochs: int = 10
image_resolution: int = 512
device: str = "cuda" if torch.cuda.is_available() else "cpu"
# 奖励函数(简化版,基于GenEval对象计数)
def compute_reward(images: torch.Tensor, prompt: str) -> torch.Tensor:
"""
模拟GenEval奖励:基于对象计数准确性
假设prompt格式为"A photo of N objects"
实际需使用物体检测模型(如YOLO)计算N_gen
"""
# 提取prompt中的参考对象数
import re
match = re.search(r"A photo of (\d+) objects", prompt)
n_ref = int(match.group(1)) if match else 1
# 模拟物体检测(实际需替换为真实检测模型)
n_gen = torch.randint(n_ref - 1, n_ref + 2, (images.shape[0],)).float().to(images.device)
# 奖励公式:r = |N_gen - N_ref| / N_ref
reward = 1 - torch.abs(n_gen - n_ref) / n_ref
return reward.clamp(0, 1)
# Flow-GRPO训练类
class FlowGRPOTrainer:
def __init__(self, config: Config):
self.config = config
self.device = torch.device(config.device)
# 初始化SD3.5-M模型
self.pipe = StableDiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-3.5-medium",
torch_dtype=torch.float16,
use_auth_token=False
).to(self.device)
# 应用LoRA微调
lora_config = LoraConfig(
r=config.lora_rank,
lora_alpha=config.lora_alpha,
target_modules=["transformer_blocks"], # 针对SD3.5-M的Transformer模块
lora_dropout=0.1
)
self.pipe.unet = get_peft_model(self.pipe.unet, lora_config)
# 参考模型(冻结权重)
self.ref_pipe = StableDiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-3.5-medium",
torch_dtype=torch.float16,
use_auth_token=False
).to(self.device)
for param in self.ref_pipe.unet.parameters():
param.requires_grad = False
# 优化器
self.optimizer = torch.optim.Adam(
self.pipe.unet.parameters(),
lr=config.learning_rate
)
# 噪声调度器
self.scheduler = self.pipe.scheduler
def ode_to_sde_step(self, x_t: torch.Tensor, t: float, model, prompt: str) -> Tuple[torch.Tensor, torch.Tensor]:
"""
ODE-to-SDE转换(论文Eq. 12)
"""
with torch.no_grad():
# 计算速度场 v_θ(x_t, t)
v_theta = model(x_t, t, prompt).sample # 假设model返回速度场
# SDE漂移项
sigma_t = self.config.noise_level * np.sqrt(t / (1 - t + 1e-6))
drift = v_theta + (sigma_t ** 2 / (2 * t + 1e-6)) * (x_t + (1 - t) * v_theta)
# 时间步长
delta_t = 1.0 / self.config.train_timesteps
# 随机项
epsilon = torch.randn_like(x_t)
diffusion = sigma_t * np.sqrt(delta_t) * epsilon
# SDE更新
x_next = x_t + drift * delta_t + diffusion
# 计算策略概率(高斯分布)
mean = x_t + drift * delta_t
log_prob = Normal(mean, sigma_t * np.sqrt(delta_t)).log_prob(x_next)
return x_next, log_prob
def sample_trajectory(self, prompt: str, timesteps: int) -> Tuple[List[torch.Tensor], List[torch.Tensor]]:
"""
使用SDE采样生成轨迹
"""
x_t = torch.randn(
(self.config.batch_size, 4, self.config.image_resolution // 8, self.config.image_resolution // 8),
device=self.device,
dtype=torch.float16
)
trajectory = [x_t]
log_probs = []
for step in range(timesteps):
t = 1.0 - step / timesteps
x_t, log_prob = self.ode_to_sde_step(x_t, t, self.pipe.unet, prompt)
trajectory.append(x_t)
log_probs.append(log_prob)
return trajectory, log_probs
def compute_kl_divergence(self, x_t: torch.Tensor, t: float, x_next: torch.Tensor, prompt: str) -> torch.Tensor:
"""
计算KL散度(论文Eq. 13)
"""
with torch.no_grad():
v_theta = self.pipe.unet(x_t, t, prompt).sample
v_ref = self.ref_pipe.unet(x_t, t, prompt).sample
sigma_t = self.config.noise_level * np.sqrt(t / (1 - t + 1e-6))
delta_t = 1.0 / self.config.train_timesteps
kl = (delta_t / 2) * ((sigma_t * (1 - t) / (2 * t + 1e-6) + 1 / sigma_t) ** 2) * \
torch.norm(v_theta - v_ref, dim=(1, 2, 3)) ** 2
return kl
def train_step(self, prompt: str) -> float:
"""
单步训练
"""
self.pipe.unet.train()
# 采样轨迹
trajectory, log_probs = self.sample_trajectory(prompt, self.config.train_timesteps)
x_0 = trajectory[-1] # 最终生成图像(潜空间)
# 解码图像
with torch.no_grad():
images = self.pipe.vae.decode(x_0 / self.pipe.vae.config.scaling_factor).sample
images = (images / 2 + 0.5).clamp(0, 1)
# 计算奖励
rewards = compute_reward(images, prompt)
# 计算优势
advantages = (rewards - rewards.mean()) / (rewards.std() + 1e-6)
# GRPO损失
loss = 0
for t in range(self.config.train_timesteps - 1):
x_t = trajectory[t]
x_next = trajectory[t + 1]
log_prob = log_probs[t]
# 计算参考策略概率
with torch.no_grad():
_, ref_log_prob = self.ode_to_sde_step(x_t, 1.0 - t / self.config.train_timesteps, self.ref_pipe.unet, prompt)
# 比率
ratio = torch.exp(log_prob - ref_log_prob)
# 剪切损失
clipped_ratio = torch.clamp(ratio, 1 - self.config.clip_eps, 1 + self.config.clip_eps)
grpo_loss = -torch.min(ratio * advantages, clipped_ratio * advantages).mean()
# KL散度
kl_div = self.compute_kl_divergence(x_t, 1.0 - t / self.config.train_timesteps, x_next, prompt).mean()
loss += grpo_loss + self.config.kl_beta * kl_div
# 优化
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
return loss.item()
async def train(self, prompts: List[str]):
"""
训练循环(支持Pyodide异步运行)
"""
for epoch in range(self.config.max_epochs):
epoch_loss = 0
for prompt in prompts:
loss = self.train_step(prompt)
epoch_loss += loss
logger.info(f"Epoch {epoch+1}, Prompt: {prompt}, Loss: {loss:.4f}")
# Pyodide异步支持
if platform.system() == "Emscripten":
await asyncio.sleep(0.01)
logger.info(f"Epoch {epoch+1}, Average Loss: {epoch_loss / len(prompts):.4f}")
# 主函数
async def main():
config = Config()
trainer = FlowGRPOTrainer(config)
# 模拟GenEval提示词
prompts = [
"A photo of 2 objects",
"A photo of 3 objects",
"A photo of 4 objects"
]
await trainer.train(prompts)
# 运行
if platform.system() == "Emscripten":
asyncio.ensure_future(main())
else:
if __name__ == "__main__":
asyncio.run(main())
代码说明
-
模型初始化:
- 使用
diffusers库加载SD3.5-M模型,并应用LoRA微调(论文使用LoRA,( α = 64 \alpha=64 α=64), ( r = 32 r=32 r=32))。 - 冻结参考模型(
ref_pipe)以计算KL散度和参考策略概率。
- 使用
-
ODE-to-SDE转换:
- 实现论文Eq. 12的SDE更新规则,添加漂移项和随机项。
- 假设
unet输出速度场(实际需适配SD3.5-M的输出格式,可能需要额外处理)。 - 噪声水平( σ t = a t 1 − t \sigma_t = a \sqrt{\frac{t}{1-t}} σt=a1−tt ),( a = 0.7 a=0.7 a=0.7 )。
-
Denoising Reduction:
- 训练时使用10个时间步(
train_timesteps=10),推理时可切换到40步(eval_timesteps=40)。 - 采样轨迹时使用较少步骤以加速数据收集。
- 训练时使用10个时间步(
-
GRPO优化:
- 实现论文Eq. 4的GRPO损失,包括剪切目标和KL正则化。
- 优势通过组内奖励归一化计算(Eq. 5)。
- KL散度基于Eq. 13计算,( β = 0.004 \beta=0.004 β=0.004)(GenEval任务)。
-
奖励函数:
- 简化为基于对象计数的奖励(论文Eq. in Section 5.1),实际应用需集成物体检测模型(如YOLO)以计算( N gen N_{\text{gen}} Ngen )。
- 奖励公式:( r = 1 − ∣ N gen − N ref ∣ N ref r = 1 - \frac{|N_{\text{gen}} - N_{\text{ref}}|}{N_{\text{ref}}} r=1−Nref∣Ngen−Nref∣),范围[0,1]。
-
异步支持:
- 遵循Pyodide指南,添加异步训练循环以支持浏览器运行。
- 使用
asyncio.sleep控制帧率,避免无限循环。
使用说明
-
环境准备:
- 安装依赖:
pip install torch diffusers transformers peft numpy - 确保GPU环境(论文使用24个A800 GPU,单GPU可能需要调整batch size)。
- 安装依赖:
-
数据准备:
- 准备GenEval风格的提示词,示例中为简单占位符,实际需使用GenEval官方脚本生成(参考论文脚注2)。
-
扩展:
- 奖励函数:替换
compute_reward为真实物体检测模型。 - 视觉文本渲染:修改奖励为OCR准确性(论文Eq. in Section 5.1)。
- 人类偏好:集成PickScore模型(参考论文链接)。
- 奖励函数:替换
注意事项
- 计算资源:完整复现需要大量GPU资源,建议在多GPU集群上运行。
- 模型输出:SD3.5-M的
unet输出需适配为速度场,实际实现可能需要修改diffusers管道。 - 奖励模型:论文使用多种奖励(如Aesthetic Score、DeQA),需额外集成(参考Appendix B.1)。
- 超参数:代码使用论文建议值,实际需根据任务调整(如( β \beta β))。
此代码提供了一个简单的框架,真实复现需进一步集成GenEval数据集、物体检测模型和完整奖励函数。
疑问解答
疑惑聚焦于GRPO(Group Relative Policy Optimization)在Flow-GRPO中的目的、使用的样本,以及是否针对SDE去噪过程中“效果不好”的样本进行强化学习。为了解答这些问题,我将结合论文内容,深入解释GRPO的作用、样本选择逻辑,并澄清与SDE去噪过程的关系。以下内容面向熟悉Flow Matching和GRPO的读者,尽量简洁但全面。
1. GRPO的目的是什么?
在Flow-GRPO中,GRPO的目的是通过在线强化学习(RL)优化Flow Matching模型的生成策略,使其在特定任务(如GenEval的组合图像生成、视觉文本渲染或人类偏好对齐)上最大化奖励。具体来说:
-
优化生成策略:Flow Matching模型(如SD3.5-M)通过确定性ODE采样生成图像,但其初始性能可能无法很好地处理复杂任务(如精确的对象计数或文本渲染)。GRPO通过调整模型参数(策略 ( π θ \pi_\theta πθ)),使生成的图像更符合任务奖励的要求。
-
最大化期望奖励:GRPO的目标是优化以下正则化目标(论文Eq. 4):
max θ E ( s 0 , a 0 , … , s T , a T ) ∼ π θ [ ∑ t = 0 T ( R ( s t , a t ) − β D K L ( π θ ( ⋅ ∣ s t ) ∥ π ref ( ⋅ ∣ s t ) ) ) ] \max_\theta \mathbb{E}_{\left(s_0, a_0, \ldots, s_T, a_T\right) \sim \pi_\theta}\left[\sum_{t=0}^T\left(R(s_t, a_t) - \beta D_{\mathrm{KL}}\left(\pi_\theta(\cdot | s_t) \| \pi_{\text{ref}}(\cdot | s_t)\right)\right)\right] θmaxE(s0,a0,…,sT,aT)∼πθ[t=0∑T(R(st,at)−βDKL(πθ(⋅∣st)∥πref(⋅∣st)))]
其中,( R ( s t , a t ) R(s_t, a_t) R(st,at)) 是奖励(仅在最后一步 ( t = 0 t=0 t=0) 非零),( β D K L \beta D_{\mathrm{KL}} βDKL) 是KL散度正则化项,防止模型偏离预训练权重太远。 -
改进任务性能:例如,在GenEval任务中,GRPO通过优化使模型生成的图像更准确地满足提示词要求(如对象数量、颜色、空间关系),将准确率从63%提升至95%(论文Table 1)。
总结:GRPO的目的是通过RL微调Flow Matching模型,使其生成的图像在特定任务上获得更高奖励,同时保持图像质量和多样性(通过KL约束避免奖励黑客)。
2. 把哪些样本用来强化学习?
GRPO使用的样本是通过SDE采样生成的一组图像轨迹,这些样本是模型根据当前策略 ( π θ \pi_\theta πθ)(即当前模型参数)为给定提示词生成的。具体来说:
-
样本生成过程:
- 对于每个提示词 ( c c c),模型使用SDE采样(论文Section 4.2,Eq. 12)生成一组 ( G = 24 G=24 G=24) 个图像(论文Appendix B.2),每张图像对应一条从初始噪声 ( x T x_T xT) 到最终图像 ( x 0 x_0 x0) 的去噪轨迹 ( { x T i , x T − 1 i , … , x 0 i } \{x_T^i, x_{T-1}^i, \ldots, x_0^i\} {xTi,xT−1i,…,x0i})(( i = 1 , … , G i=1, \ldots, G i=1,…,G))。
- 这些轨迹是通过ODE-to-SDE转换生成的,引入随机性以支持RL探索(论文Eq. 12):
x t + Δ t = x t + [ v θ ( x t , t ) + σ t 2 2 t ( x t + ( 1 − t ) v θ ( x t , t ) ) ] Δ t + σ t Δ t ϵ \boldsymbol{x}_{t+\Delta t} = \boldsymbol{x}_t + \left[ \boldsymbol{v}_\theta(\boldsymbol{x}_t, t) + \frac{\sigma_t^2}{2 t} \left( \boldsymbol{x}_t + (1-t) \boldsymbol{v}_\theta(\boldsymbol{x}_t, t) \right) \right] \Delta t + \sigma_t \sqrt{\Delta t} \epsilon xt+Δt=xt+[vθ(xt,t)+2tσt2(xt+(1−t)vθ(xt,t))]Δt+σtΔtϵ
其中,( ϵ ∼ N ( 0 , I ) \epsilon \sim \mathcal{N}(0, \boldsymbol{I}) ϵ∼N(0,I)) 引入随机性,( σ t = a t 1 − t \sigma_t = a \sqrt{\frac{t}{1-t}} σt=a1−tt)(( a = 0.7 a=0.7 a=0.7))控制噪声水平。
-
样本选择:
- 所有生成的样本都用于强化学习,而不仅仅是“效果不好”的样本。GRPO通过组内奖励归一化(论文Eq. 5)计算每个样本的优势:
A ^ t i = R ( x 0 i , c ) − mean ( { R ( x 0 i , c ) } i = 1 G ) std ( { R ( x 0 i , c ) } i = 1 G ) \hat{A}_t^i = \frac{R(x_0^i, c) - \text{mean}(\{R(x_0^i, c)\}_{i=1}^G)}{\text{std}(\{R(x_0^i, c)\}_{i=1}^G)} A^ti=std({R(x0i,c)}i=1G)R(x0i,c)−mean({R(x0i,c)}i=1G)
其中,( R ( x 0 i , c ) R(x_0^i, c) R(x0i,c)) 是第 ( i i i) 张生成图像的奖励(例如,GenEval任务中基于对象计数准确性计算)。 - 优势 (
A
^
t
i
\hat{A}_t^i
A^ti) 衡量了每个样本相对于组内平均奖励的表现:
- 高奖励样本(( A ^ t i > 0 \hat{A}_t^i > 0 A^ti>0)):表明该轨迹生成的效果更好,GRPO会增加此类轨迹的生成概率。
- 低奖励样本(( A ^ t i < 0 \hat{A}_t^i < 0 A^ti<0)):表明效果较差,GRPO会减少此类轨迹的生成概率。
- 中等奖励样本:通过组内归一化,GRPO也能利用这些样本的信息,确保策略更新稳定。
- 所有生成的样本都用于强化学习,而不仅仅是“效果不好”的样本。GRPO通过组内奖励归一化(论文Eq. 5)计算每个样本的优势:
-
样本的多样性:
- SDE采样的随机性确保了生成轨迹的多样性(论文Section 5.3,Figure 5(b)),这对RL的探索至关重要。噪声水平 ( a = 0.7 a=0.7 a=0.7) 被调优以平衡探索和图像质量。
- 所有样本(无论奖励高低)都用于计算GRPO损失(论文Eq. 6),通过最小化以下目标更新策略:
F Flow-GRPO ( θ ) = E c , { x i } i = 1 G ∼ π θ old [ 1 G ∑ i = 1 G 1 T ∑ t = 0 T − 1 ( min ( r t i ( θ ) A ^ t i , clip ( r t i ( θ ) , 1 − ε , 1 + ε ) A ^ t i ) − β D K L ( π θ ∥ π ref ) ) ] \mathcal{F}_{\text{Flow-GRPO}}(\theta) = \mathbb{E}_{c, \{x^i\}_{i=1}^G \sim \pi_{\theta_{\text{old}}}} \left[ \frac{1}{G} \sum_{i=1}^G \frac{1}{T} \sum_{t=0}^{T-1} \left( \min \left( r_t^i(\theta) \hat{A}_t^i, \text{clip}(r_t^i(\theta), 1-\varepsilon, 1+\varepsilon) \hat{A}_t^i \right) - \beta D_{\mathrm{KL}}(\pi_\theta \| \pi_{\text{ref}}) \right) \right] FFlow-GRPO(θ)=Ec,{xi}i=1G∼πθold[G1i=1∑GT1t=0∑T−1(min(rti(θ)A^ti,clip(rti(θ),1−ε,1+ε)A^ti)−βDKL(πθ∥πref))]
其中,( r t i ( θ ) = p θ ( x t − 1 i ∣ x t i , c ) p θ old ( x t − 1 i ∣ x t i , c ) r_t^i(\theta) = \frac{p_\theta(x_{t-1}^i | x_t^i, c)}{p_{\theta_{\text{old}}}(x_{t-1}^i | x_t^i, c)} rti(θ)=pθold(xt−1i∣xti,c)pθ(xt−1i∣xti,c)) 是策略比率,( ε = 0.2 \varepsilon=0.2 ε=0.2) 是剪切范围。
总结:GRPO使用SDE采样生成的一组 ( G = 24 G=24 G=24) 个图像轨迹(包括高、中、低奖励样本),通过优势归一化利用所有样本的信息来优化策略。样本的选择不局限于“效果不好”的样本,而是涵盖所有生成结果以支持全面探索和学习。
3. 是否把SDE去噪过程中“效果不好”的样本用来强化学习?
你的疑问提到是否专门针对SDE去噪过程中“效果不好”的样本进行强化学习。答案是不是专门针对“效果不好”的样本,而是利用所有样本,通过优势估计来区分好坏。以下是详细解释:
-
SDE去噪过程:
- SDE采样生成从初始噪声 ( x T x_T xT) 到最终图像 ( x 0 x_0 x0) 的轨迹,每条轨迹包含 ( T = 10 T=10 T=10) 个去噪步骤(训练时,论文Section 4.3)。
- 去噪过程中的中间状态 ( x t x_t xt)(( t = T , T − 1 , … , 1 t=T, T-1, \ldots, 1 t=T,T−1,…,1))用于计算策略概率 ( p θ ( x t − 1 ∣ x t , c ) p_\theta(x_{t-1} | x_t, c) pθ(xt−1∣xt,c)) 和KL散度,但最终奖励 ( R ( x 0 , c ) R(x_0, c) R(x0,c)) 仅基于最终图像 ( x 0 x_0 x0)(论文Section 3.2)。
-
“效果不好”的样本:
- 在GRPO中,“效果不好”的样本指的是奖励 ( R ( x 0 i , c ) R(x_0^i, c) R(x0i,c)) 较低的生成图像(例如,GenEval任务中对象计数错误)。
- 这些样本不会被单独挑选出来,而是作为组内样本的一部分,通过优势 ( A ^ t i \hat{A}_t^i A^ti) 的负值自然减少其对策略更新的贡献。
- 例如,如果某张图像的奖励低于组平均值,其优势 ( A ^ t i < 0 \hat{A}_t^i < 0 A^ti<0),GRPO会通过损失函数降低生成类似轨迹的概率(论文Eq. 6中的 ( min ( r t i A ^ t i , clip ) \min(r_t^i \hat{A}_t^i, \text{clip}) min(rtiA^ti,clip)) 项)。
-
所有样本的作用:
- GRPO的核心是利用组内奖励的相对差异(通过归一化优势)来指导策略更新。低奖励样本帮助模型识别“避免”的生成路径,高奖励样本则引导模型朝“更好”的方向优化。
- 论文实验(Section 5.3)表明,SDE采样的随机性(噪声水平 ( a = 0.7 a=0.7 a=0.7))确保了样本多样性,覆盖了从“效果不好”到“效果很好”的各种情况,这种多样性对RL探索至关重要(Figure 5(b))。
-
与去噪过程的关系:
- SDE去噪过程中的中间步骤(如 ( x t → x t − 1 x_t \to x_{t-1} xt→xt−1))并不直接判断“效果好坏”,而是提供策略概率和轨迹信息,用于计算GRPO损失。
- “效果不好”仅在最终图像 ( x 0 x_0 x0) 的奖励计算中体现,GRPO通过回溯整条轨迹(从 ( x T x_T xT) 到 ( x 0 x_0 x0))优化整个去噪过程,使未来的轨迹更可能生成高奖励图像。
总结:GRPO不专门针对SDE去噪过程中“效果不好”的样本,而是利用所有生成的样本(包括好、中、差),通过优势归一化区分效果好坏,优化整个去噪策略以提升最终图像的奖励。
4. 结合代码的解释
为了进一步澄清,参考了之前提供的训练代码,以下是与GRPO样本使用相关的关键部分:
-
样本生成(
sample_trajectory方法):def sample_trajectory(self, prompt: str, timesteps: int) -> Tuple[List[torch.Tensor], List[torch.Tensor]]: x_t = torch.randn((self.config.batch_size, 4, self.config.image_resolution // 8, self.config.image_resolution // 8), device=self.device, dtype=torch.float16) trajectory = [x_t] log_probs = [] for step in range(timesteps): t = 1.0 - step / timesteps x_t, log_prob = self.ode_to_sde_step(x_t, t, self.pipe.unet, prompt) trajectory.append(x_t) log_probs.append(log_prob) return trajectory, log_probs- 这里为每个提示词生成 (
G
=
24
G=24
G=24) 条轨迹(
batch_size=24),每条轨迹包含 ( T = 10 T=10 T=10) 个去噪步骤,使用SDE采样(ode_to_sde_step)。 - 所有轨迹都保存,用于后续奖励和优势计算。
- 这里为每个提示词生成 (
G
=
24
G=24
G=24) 条轨迹(
-
奖励和优势计算(
train_step方法):rewards = compute_reward(images, prompt) advantages = (rewards - rewards.mean()) / (rewards.std() + 1e-6)- 每条轨迹的最终图像 (
x
0
x_0
x0) 计算奖励(
compute_reward),基于任务(如对象计数)。 - 优势通过组内归一化计算,覆盖所有样本(高、中、低奖励),用于区分效果好坏。
- 每条轨迹的最终图像 (
x
0
x_0
x0) 计算奖励(
-
GRPO损失(
train_step方法):for t in range(self.config.train_timesteps - 1): x_t = trajectory[t] x_next = trajectory[t + 1] log_prob = log_probs[t] with torch.no_grad(): _, ref_log_prob = self.ode_to_sde_step(x_t, 1.0 - t / self.config.train_timesteps, self.ref_pipe.unet, prompt) ratio = torch.exp(log_prob - ref_log_prob) clipped_ratio = torch.clamp(ratio, 1 - self.config.clip_eps, 1 + self.config.clip_eps) grpo_loss = -torch.min(ratio * advantages, clipped_ratio * advantages).mean() kl_div = self.compute_kl_divergence(x_t, 1.0 - t / self.config.train_timesteps, x_next, prompt).mean() loss += grpo_loss + self.config.kl_beta * kl_div- 每条轨迹的每个时间步都用于计算策略比率 ( r t i r_t^i rti) 和KL散度,所有样本(无论奖励高低)都贡献到损失中。
- 优势 ( A ^ t i \hat{A}_t^i A^ti)(基于奖励)决定每个样本对策略更新的影响:高奖励样本推动策略向其靠拢,低奖励样本则减少其影响。
代码体现:所有生成的轨迹(包括“效果不好”的样本)都用于GRPO优化,通过优势归一化自动调整样本的贡献权重。
5. 解答你的具体疑惑
-
“是把SDE去噪过程中效果不好的样本用来强化学习吗?”
- 不是专门使用“效果不好”的样本,而是使用所有样本((
G
=
24
G=24
G=24) 条轨迹)。GRPO通过优势 (
A
^
t
i
\hat{A}_t^i
A^ti) 自动区分效果好坏:
- 效果好的样本(高奖励,( A ^ t i > 0 \hat{A}_t^i > 0 A^ti>0))引导策略优化。
- 效果不好的样本(低奖励,( A ^ t i < 0 \hat{A}_t^i < 0 A^ti<0))减少其生成概率。
- 中间样本(( A ^ t i ≈ 0 \hat{A}_t^i \approx 0 A^ti≈0))提供稳定性和探索信息。
- SDE去噪过程的随机性确保样本覆盖多种可能性(论文Figure 5(b)),而不是只关注“不好”的样本。
- 不是专门使用“效果不好”的样本,而是使用所有样本((
G
=
24
G=24
G=24) 条轨迹)。GRPO通过优势 (
A
^
t
i
\hat{A}_t^i
A^ti) 自动区分效果好坏:
-
“GRPO如何决定哪些样本重要?”
- 通过组内奖励归一化(Eq. 5),GRPO计算每个样本的优势 ( A ^ t i \hat{A}_t^i A^ti),优势高的样本对策略更新贡献更大。
- 低奖励样本不会被丢弃,而是通过负优势帮助模型学习“避免”类似的生成路径。
-
“SDE去噪过程与样本好坏的关系?”
- 去噪过程本身不判断样本好坏,仅生成多样化轨迹。样本的好坏由最终图像的奖励 ( R ( x 0 , c ) R(x_0, c) R(x0,c)) 决定,GRPO通过回溯轨迹优化整个去噪策略。
6. 总结
- GRPO的目的:通过在线RL优化Flow Matching模型的生成策略,最大化任务奖励(如GenEval准确率),同时通过KL约束保持图像质量和多样性。
- 使用的样本:所有通过SDE采样生成的 (G=24) 条轨迹(包括高、中、低奖励样本),通过优势归一化区分效果好坏。
- 是否针对“效果不好”的样本:不是专门针对“效果不好”的样本,而是利用所有样本,GRPO通过优势自动调整每个样本的贡献,低奖励样本帮助模型避免不良生成路径。
- SDE的作用:SDE采样引入随机性,生成多样化轨迹,支持RL探索,但样本好坏由最终奖励决定,而非去噪过程中的中间状态。
推理过程和正常flow matching的区别
详细解答:
- 正常Flow Matching模型的推理过程:是否需要ODE求解器一步步生成图像?
- Flow-GRPO训练后的模型在推理时的使用方式:与正常Flow Matching有何不同?
- 代码示例:展示推理过程的实现。
解答将面向熟悉Flow Matching和GRPO的读者,结合论文中的数学公式和实验细节,保持简洁但全面。
1. 正常Flow Matching模型的推理过程
Flow Matching模型的核心是学习一个连续时间归一化流的向量场,通过确定性常微分方程(ODE)从噪声样本 ( x 1 ∼ N ( 0 , I ) \boldsymbol{x}_1 \sim \mathcal{N}(0, \boldsymbol{I}) x1∼N(0,I) ) 生成数据样本 ( x 0 ∼ X 0 \boldsymbol{x}_0 \sim X_0 x0∼X0 )。推理过程确实需要使用ODE求解器逐步生成图像。以下是详细说明:
-
数学基础(论文Section 3.1):
- Flow Matching模型(如Rectified Flow)定义了从数据 (
x
0
\boldsymbol{x}_0
x0 ) 到噪声 (
x
1
\boldsymbol{x}_1
x1 ) 的线性插值:
x t = ( 1 − t ) x 0 + t x 1 , t ∈ [ 0 , 1 ] \boldsymbol{x}_t = (1-t) \boldsymbol{x}_0 + t \boldsymbol{x}_1, \quad t \in [0,1] xt=(1−t)x0+tx1,t∈[0,1] - 模型通过最小化Flow Matching目标学习速度场 (
v
θ
(
x
t
,
t
)
\boldsymbol{v}_\theta(\boldsymbol{x}_t, t)
vθ(xt,t) ):
L ( θ ) = E t , x 0 ∼ X 0 , x 1 ∼ X 1 [ ∥ v − v θ ( x t , t ) ∥ 2 ] , v = x 1 − x 0 \mathcal{L}(\theta) = \mathbb{E}_{t, x_0 \sim X_0, x_1 \sim X_1} \left[ \left\| v - v_\theta(\boldsymbol{x}_t, t) \right\|^2 \right], \quad v = x_1 - x_0 L(θ)=Et,x0∼X0,x1∼X1[∥v−vθ(xt,t)∥2],v=x1−x0 - 推理时,生成过程遵循确定性ODE(论文Eq. 7):
d x t = v t d t \mathrm{d} \boldsymbol{x}_t = \boldsymbol{v}_t \mathrm{d} t dxt=vtdt
- Flow Matching模型(如Rectified Flow)定义了从数据 (
x
0
\boldsymbol{x}_0
x0 ) 到噪声 (
x
1
\boldsymbol{x}_1
x1 ) 的线性插值:
-
ODE求解器:
- 为了从初始噪声 (
x
1
\boldsymbol{x}_1
x1 ) 生成图像 (
x
0
\boldsymbol{x}_0
x0 ),需要数值求解上述ODE。常见方法包括:
- 显式欧拉法(论文Eq. 8):
x t − Δ t = x t + Δ t v θ ( x t , t , c ) \boldsymbol{x}_{t-\Delta t} = \boldsymbol{x}_t + \Delta t \boldsymbol{v}_\theta(\boldsymbol{x}_t, t, c) xt−Δt=xt+Δtvθ(xt,t,c)
其中,( c c c ) 是提示词(如文本提示),( Δ t = 1 / T \Delta t = 1/T Δt=1/T),( T T T ) 是时间步数(论文使用 ( T = 40 T=40 T=40 ) 用于推理,Appendix B.2)。 - 更高阶方法(如Runge-Kutta或Heun方法),以提高精度。
- 显式欧拉法(论文Eq. 8):
- 求解过程从 ( t = 1 t=1 t=1 )(纯噪声)开始,逐步迭代到 ( t = 0 t=0 t=0 \)(生成图像),每次迭代更新 ( x t \boldsymbol{x}_t xt ),最终得到 ( x 0 \boldsymbol{x}_0 x0 )。
- 论文中,Stable Diffusion 3.5 Medium(SD3.5-M)使用 ( T = 40 T=40 T=40 ) 个时间步进行推理(Appendix B.2),确保生成高质量图像。
- 为了从初始噪声 (
x
1
\boldsymbol{x}_1
x1 ) 生成图像 (
x
0
\boldsymbol{x}_0
x0 ),需要数值求解上述ODE。常见方法包括:
-
逐步生成:
- 是的,正常Flow Matching模型在推理时需要ODE求解器“一步步”生成图像。每个时间步 ( t t t ) 调用模型预测速度场 ( v θ \boldsymbol{v}_\theta vθ ),更新状态 ( x t \boldsymbol{x}_t xt ),直到完成去噪过程。
- 这种确定性采样是Flow Matching相较于扩散模型(如DDPM)的优势,因为它需要更少的步骤(论文Section 2)且生成过程是可预测的。
总结:正常Flow Matching模型在推理时通过ODE求解器(如欧拉法)逐步从噪声 ( x 1 \boldsymbol{x}_1 x1 ) 生成图像 ( x 0 \boldsymbol{x}_0 x0 ),每次迭代基于速度场 ( v θ \boldsymbol{v}_\theta vθ )。论文中,SD3.5-M使用 ( T = 40 T=40 T=40 ) 个时间步进行确定性采样。
2. Flow-GRPO训练后的模型在推理时的使用方式
经过GRPO训练的Flow-GRPO模型在推理时的使用方式与正常Flow Matching模型基本一致,即仍然使用确定性ODE采样,而不会直接使用训练时引入的SDE(随机微分方程)采样。以下是详细分析:
-
训练与推理的区别:
- 训练阶段(论文Section 4):
- Flow-GRPO通过ODE-to-SDE转换(论文Eq. 12)引入随机性,生成多样化的去噪轨迹以支持强化学习(RL)的探索:
x t + Δ t = x t + [ v θ ( x t , t ) + σ t 2 2 t ( x t + ( 1 − t ) v θ ( x t , t ) ) ] Δ t + σ t Δ t ϵ \boldsymbol{x}_{t+\Delta t} = \boldsymbol{x}_t + \left[ \boldsymbol{v}_\theta(\boldsymbol{x}_t, t) + \frac{\sigma_t^2}{2 t} \left( \boldsymbol{x}_t + (1-t) \boldsymbol{v}_\theta(\boldsymbol{x}_t, t) \right) \right] \Delta t + \sigma_t \sqrt{\Delta t} \epsilon xt+Δt=xt+[vθ(xt,t)+2tσt2(xt+(1−t)vθ(xt,t))]Δt+σtΔtϵ
其中,( ϵ ∼ N ( 0 , I ) \epsilon \sim \mathcal{N}(0, \boldsymbol{I}) ϵ∼N(0,I)) 是随机噪声,( σ t = a t 1 − t \sigma_t = a \sqrt{\frac{t}{1-t}} σt=a1−tt)(( a = 0.7 a=0.7 a=0.7))控制随机性。 - SDE采样仅用于训练,以生成多样化样本(( G = 24 G=24 G=24) 条轨迹)并计算GRPO损失(论文Eq. 6),优化模型参数 ( θ \theta θ)。
- 训练时使用Denoising Reduction策略(( T = 10 T=10 T=10) 个时间步)以加速数据收集(论文Section 4.3)。
- Flow-GRPO通过ODE-to-SDE转换(论文Eq. 12)引入随机性,生成多样化的去噪轨迹以支持强化学习(RL)的探索:
- 推理阶段:
- 在推理时,Flow-GRPO模型恢复到确定性ODE采样,与原始Flow Matching模型相同,使用完整时间步(( T = 40 T=40 T=40),Appendix B.2)。
- SDE采样引入的随机性仅用于训练阶段的探索,推理时不需要随机噪声,因为目标是生成高质量、确定性的图像。
- 论文明确指出(Section 4.3):“Full denoising steps are still used during testing to maintain performance.” 即推理时使用原始的去噪步数(( T = 40 T=40 T=40))以确保图像质量。
- 训练阶段(论文Section 4):
-
GRPO训练的影响:
- GRPO通过在线RL优化了模型参数 ( θ \theta θ),使速度场 ( v θ ( x t , t , c ) \boldsymbol{v}_\theta(\boldsymbol{x}_t, t, c) vθ(xt,t,c) ) 更适应特定任务(如GenEval的组合图像生成)。优化后的模型在生成图像时更可能满足任务要求(例如,准确的对象计数或文本渲染)。
- 具体来说,GRPO调整了策略 ( π θ ( x t − 1 ∣ x t , c ) \pi_\theta(x_{t-1} | x_t, c) πθ(xt−1∣xt,c)),使生成的轨迹更倾向于高奖励结果(论文Section 4.1)。但在推理时,模型仍然通过确定性ODE采样生成图像,不需要计算策略概率或优势。
-
推理过程:
- 输入:提示词 ( c c c )(如“A photo of 3 objects”)和初始噪声 ( x 1 ∼ N ( 0 , I ) \boldsymbol{x}_1 \sim \mathcal{N}(0, \boldsymbol{I}) x1∼N(0,I) )。
- 步骤:
- 使用优化后的模型 ( v θ \boldsymbol{v}_\theta vθ ) 和ODE求解器(如欧拉法),从 ( t = 1 t=1 t=1 ) 到 ( t = 0 t=0 t=0 ) 逐步更新 ( x t \boldsymbol{x}_t xt )。
- 使用 ( T = 40 T=40 T=40 ) 个时间步(与原始SD3.5-M一致),确保高质量生成。
- 最终输出潜空间图像 ( x 0 \boldsymbol{x}_0 x0 ),通过变分自编码器(VAE)解码为像素空间图像。
- 与正常Flow Matching的区别:
- 唯一的区别是模型参数 ( θ \theta θ) 经过GRPO优化,生成图像更符合任务奖励(如GenEval准确率从63%提升至95%,论文Table 1)。
- 推理过程的算法(ODE采样)和时间步数(( T = 40 T=40 T=40))与原始模型相同。
-
为何不使用SDE采样?:
- SDE采样在训练时引入随机性以支持RL探索(论文Section 4.2),但随机性可能降低图像质量(论文Section 5.3,Figure 5(b)提到过高噪声会导致质量下降)。
- 推理时,目标是生成高质量、确定性的图像,因此使用原始的确定性ODE采样(论文Section 4.3)。
总结:Flow-GRPO训练后的模型在推理时与正常Flow Matching模型一致,使用确定性ODE求解器(如欧拉法)以 ( T = 40 T=40 T=40 ) 个时间步逐步生成图像。GRPO优化仅影响模型参数(速度场 ( v θ \boldsymbol{v}_\theta vθ )),使生成结果更符合任务要求,而不改变推理算法或引入SDE采样。
3. 代码示例:推理过程
以下是一个简化的Python代码示例,展示如何使用经过Flow-GRPO训练的SD3.5-M模型进行推理,基于diffusers库。代码假设模型已通过GRPO训练并保存为LoRA权重。
import torch
from diffusers import StableDiffusionPipeline
from peft import PeftModel
import logging
from dataclasses import dataclass
import asyncio
import platform
# 配置日志
logging.basicConfig(level=logging.INFO)
logger = logging.getLogger(__name__)
# 推理配置
@dataclass
class InferenceConfig:
timesteps: int = 40 # 推理时间步T=40
image_resolution: int = 512
device: str = "cuda" if torch.cuda.is_available() else "cpu"
lora_path: str = "./flow_grpo_lora" # 假设LoRA权重路径
# 推理类
class FlowGRPOInference:
def __init__(self, config: InferenceConfig):
self.config = config
self.device = torch.device(config.device)
# 加载SD3.5-M模型
self.pipe = StableDiffusionPipeline.from_pretrained(
"stabilityai/stable-diffusion-3.5-medium",
torch_dtype=torch.float16,
use_auth_token=False
).to(self.device)
# 加载GRPO训练的LoRA权重
self.pipe.unet = PeftModel.from_pretrained(self.pipe.unet, config.lora_path)
# 噪声调度器
self.scheduler = self.pipe.scheduler
def ode_step(self, x_t: torch.Tensor, t: float, prompt: str) -> torch.Tensor:
"""
确定性ODE采样步骤(欧拉法,论文Eq. 8)
"""
with torch.no_grad():
# 计算速度场 v_θ(x_t, t, c)
v_theta = self.pipe.unet(x_t, t, prompt).sample # 假设unet输出速度场
# 欧拉更新
delta_t = 1.0 / self.config.timesteps
x_next = x_t + delta_t * v_theta
return x_next
def generate(self, prompt: str, num_images: int = 1) -> torch.Tensor:
"""
使用ODE采样生成图像
"""
# 初始化噪声
x_t = torch.randn(
(num_images, 4, self.config.image_resolution // 8, self.config.image_resolution // 8),
device=self.device,
dtype=torch.float16
)
# ODE采样
for step in range(self.config.timesteps):
t = 1.0 - step / self.config.timesteps
x_t = self.ode_step(x_t, t, prompt)
# 解码图像
with torch.no_grad():
images = self.pipe.vae.decode(x_t / self.pipe.vae.config.scaling_factor).sample
images = (images / 2 + 0.5).clamp(0, 1)
return images
async def run(self, prompt: str):
"""
异步推理(支持Pyodide)
"""
logger.info(f"Generating image for prompt: {prompt}")
images = self.generate(prompt)
logger.info("Image generated successfully")
return images
# 主函数
async def main():
config = InferenceConfig()
inferencer = FlowGRPOInference(config)
# 示例提示词
prompt = "A photo of 3 objects"
images = await inferencer.run(prompt)
# 保存或显示图像(需额外实现)
# 例如:torchvision.utils.save_image(images, "output.png")
if platform.system() == "Emscripten":
asyncio.ensure_future(main())
else:
if __name__ == "__main__":
asyncio.run(main())
代码说明
-
模型加载:
- 加载SD3.5-M模型,并应用GRPO训练的LoRA权重(假设保存在
./flow_grpo_lora)。 - LoRA权重仅调整部分参数,保持推理效率(论文Appendix B.2)。
- 加载SD3.5-M模型,并应用GRPO训练的LoRA权重(假设保存在
-
ODE采样(
ode_step方法):- 实现确定性ODE采样(论文Eq. 8),使用欧拉法更新状态 ( x t \boldsymbol{x}_t xt )。
- 假设
unet输出速度场 ( v θ \boldsymbol{v}_\theta vθ ),实际需适配SD3.5-M的输出格式。
-
生成过程(
generate方法):- 从初始噪声 ( x 1 \boldsymbol{x}_1 x1 ) 开始,使用 ( T = 40 T=40 T=40 ) 个时间步逐步去噪。
- 最终图像通过VAE解码为像素空间。
-
异步支持:
- 遵循Pyodide指南,添加异步推理以支持浏览器运行。
-
与训练的区别:
- 推理时不使用SDE采样(无随机项 ( ϵ \epsilon ϵ)),仅使用确定性ODE采样。
- 时间步数固定为 ( T = 40 T=40 T=40 ),与原始SD3.5-M一致(Appendix B.2)。
使用说明
- 环境:安装
diffusers,torch,peft(参考上一回答)。 - LoRA权重:需提供GRPO训练后的LoRA权重,实际运行前替换
lora_path。 - 运行:
python flow_grpo_inference.py - 输出:生成图像保存或显示(需额外实现,例如使用
torchvision)。
4. 解答你的具体疑惑
-
“正常Flow Matching模型是否需要ODE求解器一步步生成图像?”
- 是的,正常Flow Matching模型在推理时使用ODE求解器(如欧拉法),以 ( T = 40 T=40 T=40 ) 个时间步(论文标准)从噪声 ( x 1 \boldsymbol{x}_1 x1 ) 逐步生成图像 ( x 0 \boldsymbol{x}_0 x0 )。这是因为Flow Matching基于确定性ODE采样(论文Eq. 7)。
-
“Flow-GRPO训练后的模型如何使用?”
- 推理时与正常Flow Matching模型相同,使用确定性ODE采样(论文Eq. 8),时间步数为 ( T = 40 T=40 T=40 ),无需SDE采样。
- GRPO训练优化了模型参数,使生成图像更符合任务奖励(如GenEval准确率提升至95%),但不改变推理算法。
- 代码示例展示了使用优化后的模型进行ODE采样的过程,与原始SD3.5-M的推理流程一致。
-
“SDE在推理中是否使用?”
- 不使用。SDE采样仅用于训练阶段以支持RL探索(论文Section 4.2)。推理时使用确定性ODE采样以确保高质量图像(论文Section 4.3)。
5. 总结
- 正常Flow Matching:推理时使用ODE求解器(如欧拉法),以 ( T = 40 T=40 T=40 ) 个时间步逐步从噪声生成图像,基于确定性ODE采样。
- Flow-GRPO训练后:推理过程与正常Flow Matching相同,使用优化后的模型参数(速度场 ( v θ \boldsymbol{v}_\theta vθ ))和确定性ODE采样(( T = 40 T=40 T=40 )),不使用SDE采样。GRPO仅提升模型在任务上的性能(如GenEval准确率),不改变推理算法。
- 代码实现:提供了一个基于
diffusers的推理示例,展示如何加载GRPO训练的LoRA权重并使用ODE采样生成图像。
后记
2025年5月11日于上海,在grok 3大模型辅助下完成。

















 1988
1988

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









