







1. 题目简介
Input:
n
points in the plane
Output: 包含所有点的最小凸多边形的所有边
2. 基本思想 :Divide and Conquer
先把点集一分为二,分别求取相应凸多边形,然后对两个凸多边形合并。
3. 具体算法
- sort P={pi} for i=1⋯n , such that x1<x2<⋯xn
- divide
P
into
PL and PR equally by picking the median of X ,xmedian . Then PL={pi} iff. xi<xmedian , and PR=P−PL - After division, do it recursively.
- Merge: that’s the difficult part and we will expand it in detail.
4. 融合两个凸多边形
这部分是对具体算法第四部分的展开。
输入是两个点集以及包含相应点集的最小凸多边形,且有两个点集的
X
域不交叉,求一个
讨论包含所有点的最小凸多边形的性质。笔者能够想到的最简单的方法就是枚举任意三个点,然后对所有三个点所构成的三角形取并集。
但这个算法明显是
O(N
!
)
的。如果能够找到一个比较好的切入点,就会大幅降低了算法复杂度。
如下图所示,黑色菱形为已经计算好的两个凸多边形。对两者进行融合,其实是去寻找合理的两条红边,只需要讨论红边应该具有什么性质即可。
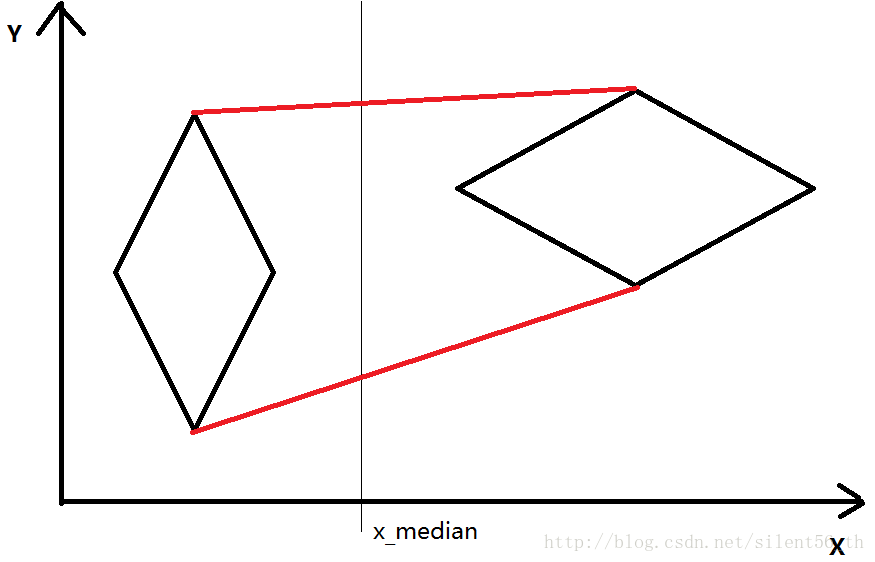
这个性质很直接了,凸多边形应该包含点集里面的所有点,并且因为是凸多边形,即所有角度数小于180°。
综上所述,对于上面的红边,应该有点集里面的所有点都比红边低,否则比红边高的点将不会被包含在以红边为边的所有凸多边形内。
形式化上诉结论有:
这是一个只有两个变量的线性规划问题,后面会解释,求解此问题复杂性为 O(N) 。
得到红边之后,逐一比较 xi∗a+b 和 yi ,若两者相等,则该点为凸多边形的顶点。
5. 整体算法的时间复杂度
如上所诉,有 T(N)=T(N/2)+O(N) ,容易求解 T(N)=O(NlogN) 。
6. 算法复杂性与数据性质的关系
若N极大,则复杂性为 O(1) 。
证明:因为推广N到 inf ,则覆盖全域,凸多边形为包含全域的凸多边形。
若已知最终的凸多边形的边数一定,为 h 。则复杂性最终为
O(Nlogh) 。证明:将求解凸多边形问题转换为求解凸多边形所有边的问题,进而可以将其转换为求解凸多边形上边和下边的问题。
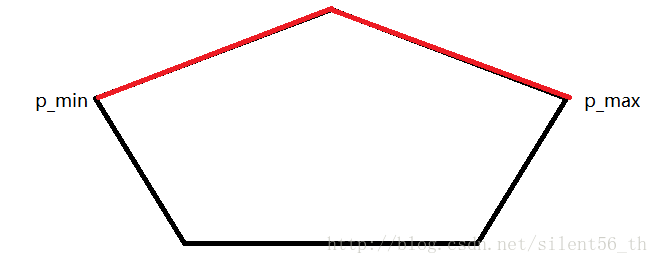
易证凸多边形的顶点中必然存在 (x1,y1) 和 (xN,yN) ,其中 x1=min(x),xN=max(x) 。 然后对凸多边形的边根据 pmin 和 pmax 进行划分,分为上边集和下边集,上边集和下边集交集为NULL,并集为所有边,上边位于所有下边上方。如下图所示,红边为上边,黑边为下边。
上边和下边的数目最多为 h ,现计算求解上边集的算法复杂性。
假设
T(N,h)=O(Nlogh)
,使用归纳法即可验证。














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









