







 本文探讨了串级控制系统的双闭环结构及其在电机控制中的应用,对比了单闭环和双闭环控制的区别,阐述了双闭环如何提高系统稳定性和响应速度。
本文探讨了串级控制系统的双闭环结构及其在电机控制中的应用,对比了单闭环和双闭环控制的区别,阐述了双闭环如何提高系统稳定性和响应速度。
双闭环结构
- 目前网上流传的一些关于双闭环的资料有很多我觉得是不对或者不够清楚的,在这边分享一下自己的理解,希望大家也能指点一下。
双闭环的作用
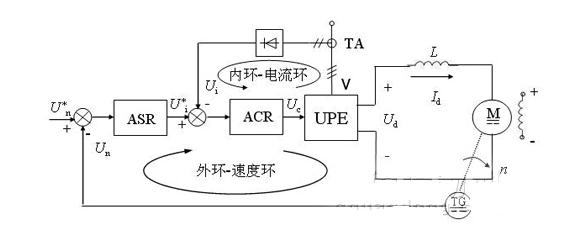
串级控制系统是改善控制质量的有效方法之一,在过程控制中得到了广泛的应用。所谓串级控制,就是采用两个控制器串联工作,外环控制器的输出作为内环控制器的设定值,由内环控制器的输出去操纵控制阀,从而对外环被控量具有更好的控制效果。这样的控制系统被称为串级系统。PID串级控制就是串级控制中的两个控制器均为PID控制器,它增强了系统的抗干扰性(也就是增强稳定性)。
- 1. 增加系统的稳定性这点是正确的,因为电机转速电流双闭环的电流换增加了对电流的反馈控制,不至于使得电流过分超调。
- 2. 但有观点认为电机双闭环可以加速启动,其实这点是不完全正确的,对于单闭环系统,只要允许较大的超调量,其实启动速度是足够快的。其实原观点表达的意思应该是加快系统启动到稳态的时间,也就是缩小调节时间。
单双闭环区别
- 双闭环比单闭环多了电流内环,用于控制电流的稳定性保证较小超调量和较好的稳定性,实际常用的简单单闭环控制系统中,为保证电流不超过电机承受极限,往往需要进行电流截止控制,另一方便未避免积分深度饱和,也需要对积分进行限幅,而为了达到快速启动的效果会给定较大的积分初值,如此一来,虽然可以勉强满足控制,但其实电流超调严重,而且稳定性较差。为此,双闭环可以减小电流的超调和过饱和现象,得到更加良好的控制效果。
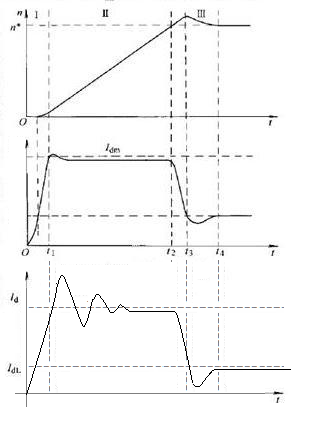
- 图一是双闭环控制下的启动电流
- 图二是双闭环控制下的转速波形
- 图三是单闭环控制下的电流波形
双闭环内环的输入问题
- 我们知道在单闭环系统中,输入转速差,转速控制器会输出对应的PWM来使得电机转速达到期望转速,其实我们已经默认了PWM和转速呈正相关关系。但在双闭环系统中,输入转速差,转速控制器会输出对应的电流大小,然后该电流与实际电流大小之差作为电流控制器的输入,再输出对应的PWM。这里面的疑问就是,我们怎么知道转速控制器对应特定转速差输出的对应电流大小应该是多少。(实际操作上我们其实就是瞎调pid而已,但其蕴含的原理是什么呢)
答:输出=速度误差 × 转动惯量/(采样时间 × 转矩系数)=(速度误差/采样时间) × 转动惯量/转矩系数=加速度 × 转动惯量/转矩系数=转矩/转矩系数=转矩电流。
即转矩最适电流=速度差*p,由于该过程不一定线性,因此需要积分环节控制存在。
- 在解答中,我们揭示了在一定程度上,转矩电流与转矩成正比,进而与转速差成正比,这样一来确定了输入转速差,我们应该输出多少电流,就好像单闭环系统中,输入转速差,我们知道应该输出多少PWM一样,这里面同样有对应关系,但往往我们都将其当作黑箱操作,而事实上双闭环在调参的过程中也是当作黑箱操作的,这边只是在原理上为大家弄清楚电流和转速差的对应关系。

















 2183
2183

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









