







二值化:设置一个阈值,图像灰度值如果小于这个阈值,就将对应灰度值设置为0,反之,保留。
按照设置阈值的方式:
1、固定阈值:预先设置的固定阈值;
2、自适应阈值:通过某种算法对图像像素进行处理,自动计算出最佳的阈值;
固定阈值就不多说了,太简单了!这里说一下自适应阈值,最经典的要数大津法(OTSU),将图像直方图用某一灰度分成两组,将分割后两组间方差对应的灰度值设置为最佳阈值,具体原理可以参考博客:点击打开链接,该博客也有对应代码,代码写的更加简洁明了。
步骤如下:
1)直方图统计0~255对应像素的数目;
2)将0,1,...,244,255依次设置为阈值,计算分组后两组的均值及方差;
3)找寻最大方差对应的分割阈值即为最佳阈值;
代码如下:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
Mat src = imread("1.jpg");
Mat gray_ori;
cvtColor(src, gray_ori, CV_BGR2GRAY);
Mat gray, gray_OTSU;
gray_ori.copyTo(gray);
gray_ori.copyTo(gray_OTSU);
// 1、fixed threshold
int thr = 30;
int i, j;
for (i = 0; i < gray.rows - 1; i++)
for (j = 0; j < gray.cols - 1; j++)
{
if (gray.at<uchar>(i, j) < thr)
{
gray.at<uchar>(i, j) = 0;
}
}
// 2、OTSU
// 2.1、直方图统计
int hist[256] = { 0 };
for (i = 0; i < gray_ori.rows - 1; i++)
for (j = 0; j < gray_ori.cols - 1; j++)
{
hist[gray_ori.at<uchar>(i, j)]++;
}
// 2.2、计算系数
int s = 0;
int hist_cum[256] = { 0 };
float hist_coeff[256] = { 0 };
for (i = 0; i < 256; i++) // 累计统计
{
s += hist[i];
hist_cum[i] = s;
hist_coeff[i] = 1.0 * s / (gray_ori.rows * gray_ori.cols);
//cout << hist_coeff[i] << endl;
}
// 2.3、计算加权值
s = 0;
int hist_cum_Add[256] = { 0 };
for (i = 0; i < 256; i++)
{
s += i * hist[i];
hist_cum_Add[i] = s;
//cout << hist_cum_Add[i] << endl;
}
// 2.4、计算均值
float hist_mean[256] = { 0 };
float hist_mean_l[256] = { 0 };
float hist_mean_r[256] = { 0 };
for (i = 0; i < 256; i++)
{
if (hist_cum[i] == 0)
{
hist_mean_l[i] = 0;
}
else
{
hist_mean_l[i] = hist_cum_Add[i] / hist_cum[i];
}
hist_mean_r[i] = (s - hist_cum_Add[i]) / (gray.rows * gray.cols - hist_cum[i]);
hist_mean[i] = hist_coeff[i] * hist_mean_l[i] + (1 - hist_coeff[i]) * hist_mean_r[i];
}
// 2.5、计算方差
float sigma[256] = { 0 };
for (i = 0; i < 256; i++)
{
sigma[i] = hist_coeff[i] * (hist_mean_l[i] - hist_mean[i]) * (hist_mean_l[i] - hist_mean[i]) +
(1 - hist_coeff[i]) * (hist_mean_r[i] - hist_mean[i]) * (hist_mean_r[i] - hist_mean[i]);
}
// 2.6、获取最佳阈值
float temp = 0;
int index = 0;
for (i = 0; i < 256; i++)
{
if (temp < sigma[i])
{
temp = sigma[i];
index = i;
}
}
cout << "best threshold is: " << index << endl;
// 进行阈值滤波
for (i = 0; i < gray_OTSU.rows - 1; i++)
for (j = 0; j < gray_OTSU.cols - 1; j++)
{
if (gray_OTSU.at<uchar>(i, j) < index)
{
gray_OTSU.at<uchar>(i, j) = 0;
}
}
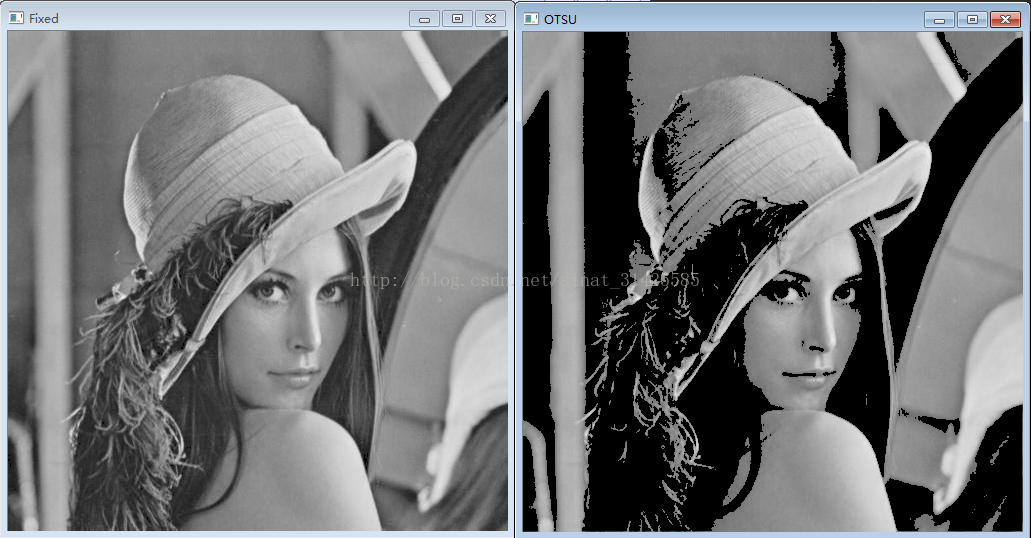
imshow("gray", gray);
imshow("OTSU", gray_OTSU);
waitKey();
return 0;
}运行效果如下:
刚才又看了一种迭代阈值法,具体步骤如下:
1、以图像均值初始化 best_thr;
2、利用best_thr将图像中像素分为两组:Group1和Group2;
3、计算Group1和Group2对应的均值u1和u2;
4、重新选择阈值:best_thr = (u1 + u2)/ 2.0;
重复2~4,直到u1和u2不再发生变化。
代码如下:
#include <opencv2/opencv.hpp>
#include <vector>
using namespace cv;
using namespace std;
int main()
{
Mat src = imread("1.jpg");
Mat gray;
cvtColor(src, gray, CV_BGR2GRAY);
int i, j;
double sum = 0;
double best_thr = 0;
for (i = 0; i < gray.rows; i++)
for (j = 0; j < gray.cols; j++)
{
sum += gray.at<uchar>(i, j);
}
// 以图像像素均值来初始化阈值
best_thr = sum / (gray.rows * gray.cols);
vector<Point> Lows;
vector<Point> Higs;
bool flag = true;
float u1 = 0, u2 = 0;
float s1 = 0, s2 = 0;
while (flag)
{
Lows.clear();
Higs.clear();
// 获取分割后的两个部分
for (i = 0; i < gray.rows; i++)
for (j = 0; j < gray.cols; j++)
{
if (gray.at<uchar>(i, j) < best_thr)
{
Lows.push_back(Point(i, j));
}
else
{
Higs.push_back(Point(i, j));
}
} // end for
s1 = 0;
u1 = 0;
for (i = 0; i < Lows.size(); i++)
{
s1 += gray.at<uchar>(Lows[i].x, Lows[i].y);
}
u1 = s1 / Lows.size();
s2 = 0;
u2 = 0;
for (i = 0; i < Higs.size(); i++)
{
s2 += gray.at<uchar>(Higs[i].x, Higs[i].y);
}
u2 = s2 / Higs.size();
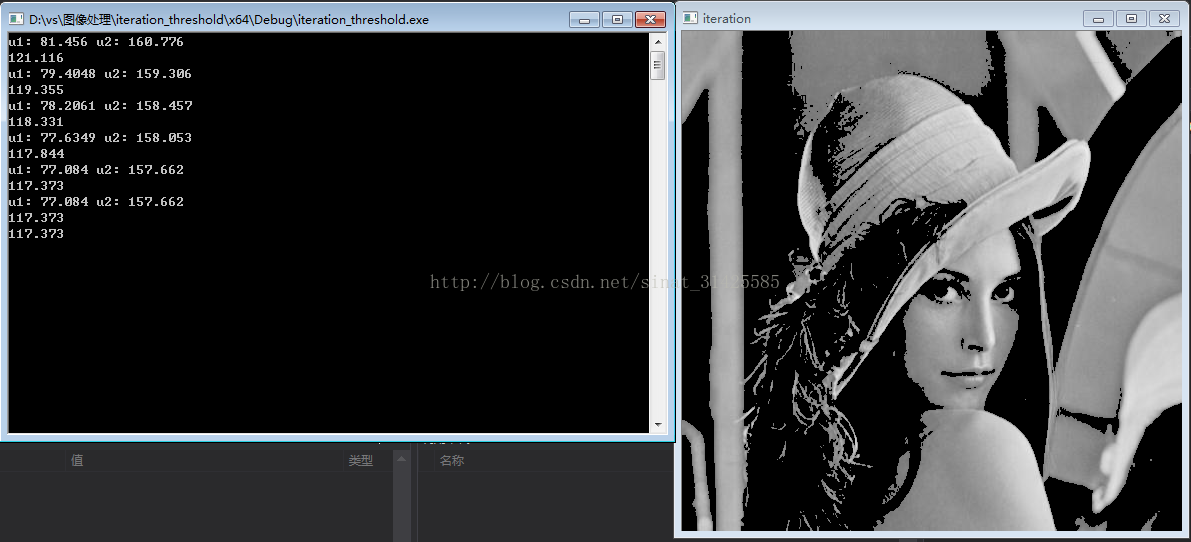
cout << "u1: " << u1 << " u2: " << u2 << endl;
// 迭代的终止条件:u1和u2都不再变化
if (abs(best_thr - (u1 + u2) / 2.0) < 0.1)
{
flag = false;
}
else
{
best_thr = (u1 + u2) / 2.0;
}
cout << best_thr << endl;
}// end while
cout << best_thr << endl;
for (i = 0; i < gray.rows; i++)
for (j = 0; j < gray.cols; j++)
{
if (gray.at<uchar>(i, j) < best_thr)
{
gray.at<uchar>(i, j) = 0;
}
}
imshow("iteration", gray);
waitKey();
return 0;
}效果如下:














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









