








 本文深入解析GAMP软件,一种开源的多系统GNSS精密单点定位解决方案,利用未差分和未组合观测值进行定位。文章详细介绍了GAMP的定位流程,包括时间更新、状态向量更新、先验残差计算、滤波更新、后验残差计算及状态更新等步骤,并提供了关键代码段。此外,还提供了GAMP软件的下载链接及参考文献。
本文深入解析GAMP软件,一种开源的多系统GNSS精密单点定位解决方案,利用未差分和未组合观测值进行定位。文章详细介绍了GAMP的定位流程,包括时间更新、状态向量更新、先验残差计算、滤波更新、后验残差计算及状态更新等步骤,并提供了关键代码段。此外,还提供了GAMP软件的下载链接及参考文献。
函数整体:pppos
整体观测方程:
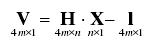
V为观测值残差向量;H为系数矩阵;X为待估参数向量;l为观测值减去计算量
1.时间更新:udstate_ppp

X矩阵与P矩阵更新:

位置:udpos_ppp
钟差(包含系统间偏差ISB和GLONASS频率间偏差ICB两个可选额外估计):udclk_ppp
天顶对流层:udtrop_ppp
电离层(选择无电离层组合时不考虑):udiono_ppp
L5接收机dcb(仅三频定位时考虑):uddcb_ppp
模糊度:udbias_ppp
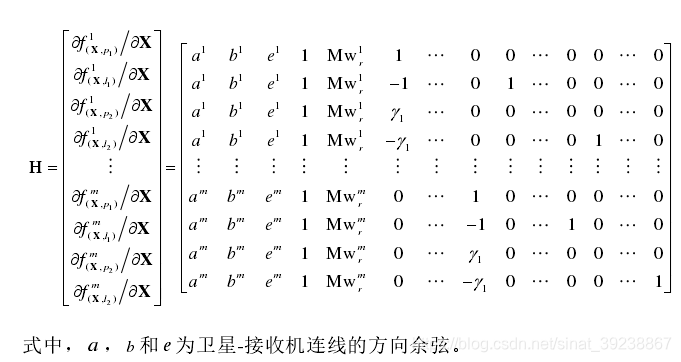
矩阵中各参数的位置索引: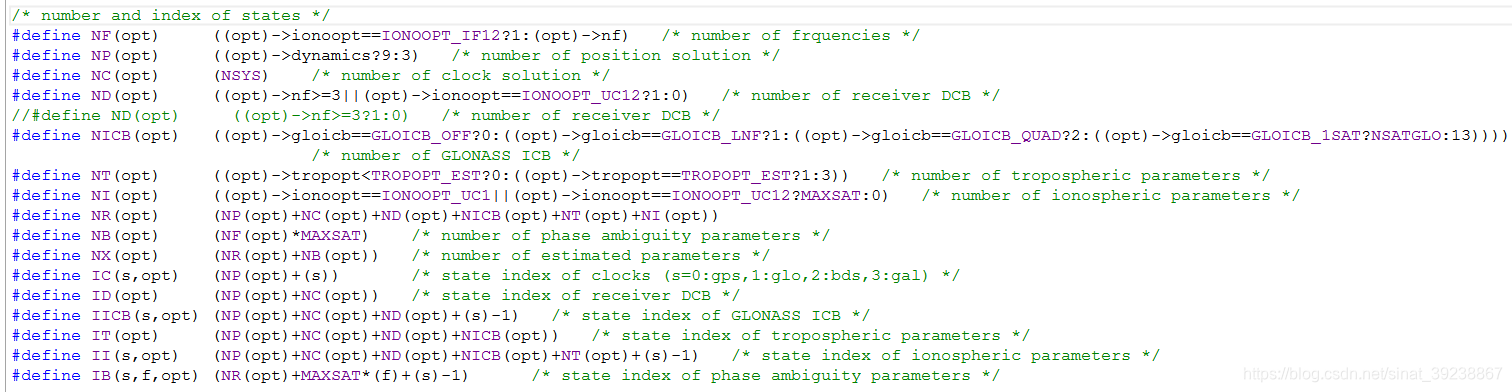
2.先验残差:ppp_res(post=0)

H矩阵、R矩阵、V矩阵更新:
V计算核心代码:

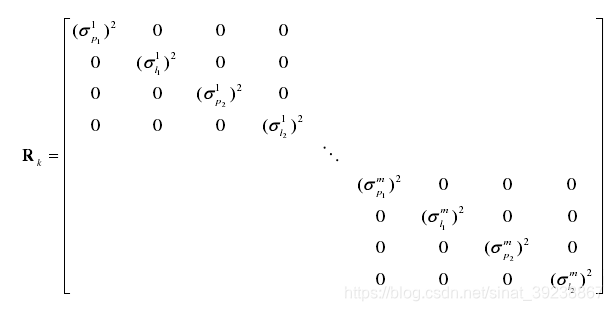
方差计算采用高度角模型,E即高度角。
R矩阵计算核心代码:
3.滤波更新:filter
 Q=H’PH+R
Q=H’PH+R
K=PHQ^-1
xp=x+Kv
Pp=(I-KH’)P(I-KH’)’+KRK’
(Pp的更新并未采用常规的Pp=(I-KH’)P公式)
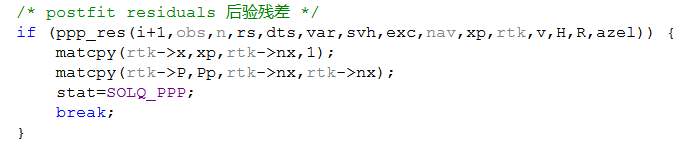
4.后验残差:ppp_res(post>0)
5.状态更新:update_stat

GAMP下载地址:https://www.ngs.noaa.gov/gps-toolbox/GAMP.htm
参考文献:
[1] Zhou F, Dong D, Li W*, Jiang X, Wickert J, Schuh H. GAMP: An open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations. GPS Solutions, 2018. doi:10.1007/s10291-018-0699-9
[2] 周锋. 多系统 GNSS 非差非组合精密单点定位相关理论和方法研究[D].2018.上海:华东师范大学

















 1629
1629

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









