







本文将要介绍的论文就是:EdgeConnect: Generative Image Inpainting with Adversarial Edge Learning,因为知乎在(2019-02-02)前,缺少详细介绍这篇论文的文章,而我最近需要复现它,所以顺便在这里对这篇论文进行介绍,毕竟还是中文母语阅读起来方便,关于翻译或者算法的指正与争议。
翻译声明
- hallucinating edges 边缘假想图 (通过不完整的图片,生成假想的边缘轮廓图片)
- edges 边缘、轮廓(在出现歧义的情况下,我会将「边缘」翻译成「轮廓」)
- edge detection 边缘检测算法(由于大家都翻译成「边缘检测」)
- image Completion /inpainting 图片修补
- fill the missing regions 填补缺失区域(为包含 修补 之思,故不将 fill 译为 填充)
- ground truth image 真实图片 (我无法给出好的翻译)
- mask 掩膜 (采用的是 PhotoShop 的翻译)
0. 摘要
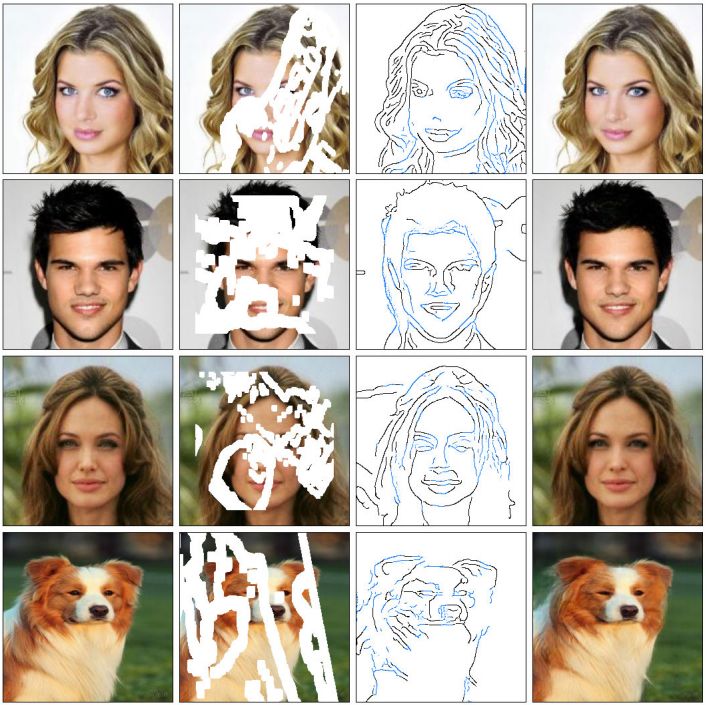
过去几年,深度学习技术在图片修补领域上取得了显著的成果。然而,这些技术在无法重构出(图片缺失区域的)合理结构,它们总是得到过于平滑或者模糊的结果。这篇论文开发了一种新的图片修补技术,它的修补效果更好,填补的区域展示出了更加精致的细节。我们提出的二阶段图片修补对抗模型 EdgeConnect,整合了边缘生成器与图片修补网络。先由边缘生成器生成出不规则缺失区域的边缘假想图,作为先验结果,然后在这张边缘假想图的基础上,使用图片修补网络对缺失区域进行填充。我们在可获取到的公共数据集 CelebA,Places2,以及 Paris StreetView 上对我们的模型进行端到端的评估,结果表明我们的结果在定量与定性的分析上,优于现阶段的其他算法。
1. 介绍
图片修补 (Image Completion /Inpainting) 就是将一张图片中的缺失区域进行修补。是许多图片编辑任务中的重要一步。举例说明,它可以被应用在 将图片中某个物体移除后,对缺失区域的修补任务上。人类有一种不可思议的能力去消除视觉上的不连续性 (visual inconsistencies)。因而填补区域必须在感知上合理 (be perceptually plausible)。另外,填补区域缺乏精细结构一直是一个令人不快的附属品,尤其是图片中的区域包含锐利的细节时。我们观察到现有图像修复技术会产生过度平滑或者模糊的区域,这推动了本文所介绍的方法的产生。
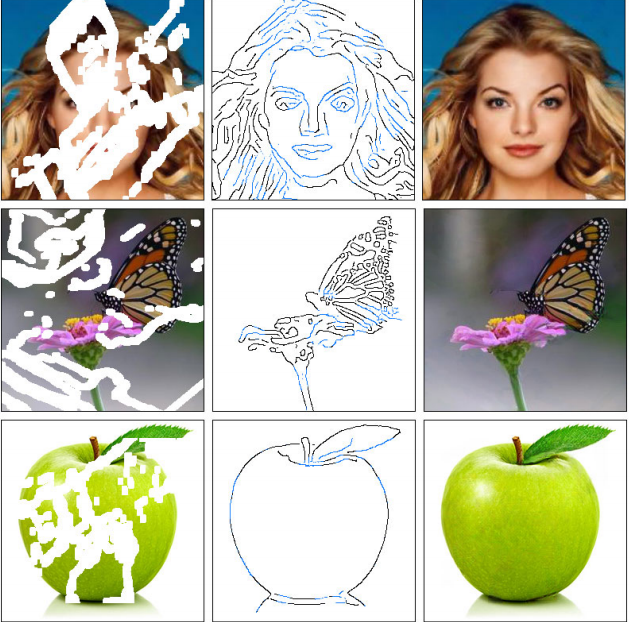
我们将图片修补分为两个阶段(如图 1):轮廓生成与图片修补。
- 边缘轮廓生成只关注生成缺失区域中的假想边缘轮廓。
- 图片修补网络使用轮廓假想图,以及输入的不完整图片,对缺失区域的 RGB 像素数值进行估计。
为了确保生成的边缘假想图 (hallucinated edges) 与 填补区域的 RGB 像素值 (RGB pixel intensities) 在视觉上的感受是连续的 (visually consistent),这两个阶段的任务,我们都使用了对抗网络去完成。两个网络都包含了基于深度特征的损失函数,以生成尽可能逼真的图片 (enforce perceptually realistic results)。
像大部分计算机视觉问题一样,图片修补任务比深度学习技术更早地被广泛地使用。广义上讲,传统的图片修补方法可以分为两种:扩散型 (diffusion-based) 与 补丁型 (patch-based)。。。。
省略对 扩散型 (diffusion-based) 与 补丁型 (patch-based) 的解释,你们『望文生义』或者『顾名思义』就行了。
目前的深度学习方法在图片修补任务上取得了显著的成果。这些方案通过学习数据的分布对缺失的像素进行填补。他们可以生成缺失区域内连贯的结构。这是传统的技术几乎不可能实现的创举。虽然这些方法可以为缺失区域生成有意义的结构,但是生成的区域通常是模糊图像,或者(不自然的)伪像 (suffer from artifacts),这表明了这些方法无法准确地重建高频率的信息。
然后,要怎样才能促使图片修补网络生成精致的细节?在图片的结构可以很好地使用它的边缘图片进行表示的情况下,我们(的研究工作)表明了:对图片修补网络进行调整,在缺失区域上生成(轮廓图 作为)先验结果是可行的。显然,我们无法获取缺失区域的边缘。相反,我们可以训练一个轮廓生成器,利用它生成这些缺失区域的轮廓。我们 “生成轮廓线条,在生成填充色彩” 的方案,有一部分灵感来自于艺术家的工作过程。。。。(省略艺术家 Betty Edwards 的话)。。。他从艺术的角度强调了草图的重要性。我们认为轮廓恢复是图片修补中的一项简单的任务,我们提出的模型,在实质上解耦合了图片修补过程中 对缺失区域的 高频与低频信息的恢复过程。
我们在标准的数据集 CelebA,Places2,以及 Paris Sreet View 上进行评估。我们将我们的模型的性能与目前最好的方案进行比较。我们提供了实验囧过来研究边缘信息对图片修补任务的影响。我们的文章做出了以下贡献:
- 一个可以生成(缺失区域)的假想轮廓的边缘轮廓生成器。它在给定了 图片剩余部分的灰度图 的情况下,能够给出缺失区域的轮廓假想图。
- 一个图片修补网络,它可以结合缺失区域(作为先验)的假想轮廓图,根据图片的其余部分,对缺失区域的色彩以及上下文信息进行填补。
- 一个结合了轮廓生成器与图片修补的端到端的训练网络。可以为为缺失区域填补上具有精致细节的内容。
我们展示了我们我们在一下常见的图像编辑任务上的应用,如物体的移除和场景生成任务。我们在 GitHub 上面开源我们的代码: knazeri/edge-connect
2. 相关工作(略写)
- 基于扩散的图片修补算法:根据临近像素,猜测缺失像素,无法得到有意义的结构。
- 基于补丁的图片修补算法:对临近区域进行复制,得到补丁,一块块填补到缺失区域。
- 基于深度学习图片修补算法:发表于 2016 年上下文编码器 context encoder 是首个,etc
- 由图片生成边缘轮廓(边缘检测算法):Canny Edge detector,Holistically-Nested Edge Detection (使用全卷积网络)
- 由轮廓生成图片:pix2pix(成对的监督训练),CycleGAN(不需要成对的两类图片)
译者注:
如果对于 Context Encoder 感兴趣,可以看 Context Encoders 论文的阅读与翻译
如果对于 CycleGAN 感兴趣,可以看曾伊言:CycleGAN 论文的阅读与翻译
被 EdgeConnect 超越的算法 (图片修补的部分卷积算法)Partial Convolutions (Pconv)。已经有介绍的文章:rootxuan:Image Inpainting for Irregular Holes Using Partial Convolutions 翻译

3. 解决方案 EdgeConnect
我们提出一个图片修补网络,它由两个阶段组成,如上图:
- 轮廓生成器
- 图片修补网络
两个阶段都使用了对抗网络如下:
- 生成器使用了与 Johnson 的实时风格迁移 “Perceptual losses for real-time style transfer and super-resolution” 相似的网络架构,这个架构常用于 图片到图片的翻译任务上,如:风格迁移,超分辨率 等。。。。(省略网络架构具体细节)。。。
- 判别器使用了 70x70 的 PatchGAN,也就是将判别图片分成 70x70 进行判别,对判别结果取平均。
- 整个网络的都使用了实例正则化 (instance normalization)
3.1. 轮廓生成器 Edge Generator
- I g t I_{gt} Igt Ground truth 真实图片
- I g r a y I_{gray} Igray grayscale 真实图片的灰度图
- C g t C_{gt} Cgt Canny edge map (ground truth) 真实图片的轮廓图
- M M M pre-condition mask 先决条件掩膜层(把缺失区域标记为 1,背景图片标记为 0)
- G 1 G_1 G1 generator_1 轮廓假想图的生成器
- ⊙ \odot ⊙ Hadamard product 哈达玛积(矩阵对应位置相乘)
将缺失的区域删除,并用字符上的波浪线标记:
- I ~ g r a y = I g r a y ⊙ ( 1 − M ) \tilde{I}_{gray} = I_{gray} \odot (1-M) I~gray=Igray⊙(1−M)不完整的灰度图
- C ~ g t = C g t ⊙ ( 1 − M ) \tilde{C}_{gt} = C_{gt} \odot (1-M) C~gt=Cgt⊙(1−M) 不完整的轮廓图。
- C p r e d C_{pred} Cpred C_{pred} ,predict Canny edges,它是轮廓假想图生成器的预测结果:
构建损失函数如下,用以训练这个对抗网络,得到轮廓生成器 Edge Generator。
L a d v , 1 \mathcal{L}_{adv, 1} Ladv,1,对抗损失(上方的公式中括号与原文位置稍有不同)
L F M = E [ ∑ i = 1 L 1 N i ∣ ∣ D 1 ( i ) ( C g t − D 1 ( i ) ( C p r e d ) ∣ ∣ 1 ] \mathcal{L}_{FM} = \mathbb{E} \bigg[ ~~ \sum \limits^{L}_{i=1} \frac{1}{N_i} || D^{(i)}_1(C_{gt} - D^{(i)}_1(C_{pred} ) ||_1 ~~\bigg] LFM=E[ i=1∑LNi1∣∣D1(i)(Cgt−D1(i)(Cpred)∣∣1 ]
L F M \mathcal{L}_{FM} LFM\mathcal{L}_{FM} feature map loss,特征损失,使用预训练好的 VGG 网络对输入的图片进行判别,这里的方法类似于 PatchGAN。注意,由于 VGG 并不是被训练用作提取图像的轮廓边缘的网络,所以此处我们不能直接使用 VGG 的结果。我们用 L L LL 表示判别器的最后一层卷积层。 N i N_i NiN_i 是判别器的第 i i ii 层的激活结果 (the activation in the i i ii 'th layer of the discriminator)。
用结合了对抗损失,与特征匹配损失 的轮廓判别器对轮廓图片进行判别: min G 1 max D 1 L G 1 = min G 1 ( λ a d v , 1 max D 1 ( L a d v , 1 ) + λ F M L F M ) λ a d v , 1 = 1 , λ F M = 10 \min\limits_{G_1} \max\limits_{D_1} \mathcal{L}_{G_1} = \min\limits_{G_1} \bigg(\lambda_{adv, 1} \max\limits_{D_1}(\mathcal{L}_{adv}, 1) + \lambda_{FM} \mathcal{L}_{FM} \bigg) \\ \lambda_{adv, 1} = 1, \lambda_{FM}= 10 G1minD1maxLG1=G1min(λadv,1D1max(Ladv,1)+λFMLFM)λadv,1=1,λFM=10
译者注:
原先的图片修补任务需要对 RGB 值图片的缺失区域进行修补,如果采用范数距离计算重构损失 L r e c o n s t r u c t i o n \mathcal{L}_{reconstruction} Lreconstruction的话,总得到模糊的图片(对可能的修补模式求平均的结果);如果采用特征距离计算对抗损失 L a d v e r s a r i a l \mathcal{L}_{adversarial} Ladversarial的话,总得到人造痕迹太明显的图片(伪像)(从训练记忆里面找一个相似的结果并贴上去)。上下文编码器 Context Encoder 采用参数加权的方式结合使用两者,只是平衡了这两个缺点。
既然如此,把图片修补任务的难度降低,不修复三通道的 RGB 图,转而修复只有轮廓的二值图。修复得到了轮廓图片后,将其转变为风格迁移任务(将轮廓图转化为彩色图片)。这个过程,把恢复高频信息与低频信息的过程解耦合,从而解决图片修补任务。
此外,使用 谱归一化 (Spectral Normalization, SN) 稳定判别器的训练。
译者注: 谱归一化是 WGAN 的简化。
何为 WGAN(Wasserstein GAN)?
引入 Wasserstein Distance 使得判别器满足 **限制导数小于 K 的 L 连续(K-Lipschitz continuous)**的条件。这个方案认为:训练过程中,判别器过早进入了理想状态,总是很好地识别真实数据,此时如果两个分布距离很远,几乎没有重叠,那么 KL 散度(KL Divergence)或者 JS 散度 几乎无法给生成器提供梯度信息。因此,即便在两个分布没有重叠的时候,使用 Wasserstein Distance(推土机距离)正确地度量两个分布的距离,将会使判别器更稳定地为生成器提供梯度。
何为谱归一化 (Spectral Normalization, SN)?
求解 Wasserstein Distance 的计算量较大:通过对权重的奇异值求解,可以得到这一层网络的谱范数(spectral norm),接着让每一层网络的权重除以这一层网络的谱范数就可以满足 1-Lipschitz continuous。因此我们采用幂函数迭代法(power iteration)近似地求解谱范数。
3.2. 图片修补网络 Image Completion Network
C c o m p = C g t ⊙ ( 1 − M ) + C p r e d ⊙ M C_{comp} = C_{gt} \odot (1-M) + C_{pred} \odot M Ccomp=Cgt⊙(1−M)+Cpred⊙MC,composite,合成轮廓图
I p r e d I_{pred} Ipred,它是图片修补网络的预测结果:
I pred = G 2 ( I ~ g t , C comp ) I_{\text {pred }}=G_2\left(\tilde{I}_{g t}, C_{\text {comp }}\right) Ipred =G2(I~gt,Ccomp )
构建损失函数如下,用以训练这个对抗网络,得到轮廓生成器 Edge Generator。
L a d v , 2 = E ( I g t , C comp ) log [ D 2 ( I gt , C comp ) ] + E C comp log [ 1 − D 2 ( I pred , C cornp ) ] \begin{aligned} \mathcal{L}_{a d v, 2} & =\mathbb{E}_{\left(I_{g t}, C_{\text {comp }}\right)} \log \left[D_2\left(I_{\text {gt }}, C_{\text {comp }}\right)\right] \\ & +\mathbb{E}_{C_{\text {comp }}} \log \left[1-D_2\left(I_{\text {pred }}, C_{\text {cornp }}\right)\right]\end{aligned} Ladv,2=E(Igt,Ccomp )log[D2(Igt ,Ccomp )]+ECcomp log[1−D2(Ipred ,Ccornp )]
L a d v , 2 \mathcal{L}_{adv, 2} Ladv,2 adversarial loss,对抗损失(上方的公式中括号与原文位置稍有不同)
L p r e c = E [ ∑ i 1 N i ∣ ∣ ϕ 1 ( i ) ( I g t − ϕ 1 ( i ) ( I p r e d ) ∣ ∣ 1 ] \mathcal{L}_{prec} = \mathbb{E} \bigg[ ~~ \sum \limits_{i} \frac{1}{N_i} || \phi^{(i)}_1(I_{gt} - \phi^{(i)}_1(I_{pred} ) ||_1 ~~\bigg] Lprec=E[ i∑Ni1∣∣ϕ1(i)(Igt−ϕ1(i)(Ipred)∣∣1 ]
L p r e c \mathcal{L}_{prec} Lprec preceptual loss,感知损失,使用预训练好的 VGG-19 网络对输入的图片进行判别,参见 PatchGAN。公式中的 ϕ i \phi_i ϕi 对应了来自 VGG-19 的激活函数特征图 r e l u _ i _ 1 relu\_i\_1 relu_i_1 , 其中 i ∈ { 1 , 2 , 3 , 4 , 5 } i \in \{1, 2, 3, 4, 5\} i∈{1,2,3,4,5} 。VGG-19 网络来自在 ImageNet 上的预训练版本。
L s t y l e = E j [ ∣ ∣ G j ϕ ( I p r e d ) − G j ϕ ( I g t ) ∣ ∣ 1 ] \mathcal{L}_{style} = \mathbb{E}_j \bigg[ ~~ || G^{\phi}_j(I_{pred})- G^{\phi}_j(I_{gt} ) ||_1 ~~\bigg] Lstyle=Ej[ ∣∣Gjϕ(Ipred)−Gjϕ(Igt)∣∣1 ]
L s t y l e \mathcal{L}_{style} Lstyle style loss 风格损失。公式中的 G j ϕ G^{\phi}_j Gjϕ是一个 C j × C j C_j \times C_j Cj×Cj的伽马矩阵 (Gram Matrix) 对激活函数特征图 ϕ j \phi_j ϕj 进行构造得到的,我们使用的风格损失函数,在 Sajjadi 的论文 Single image super-resolution through automated texture synthesis 得到叙述。
用结合了绝对值范数(L1 距离 ℓ 1 \ell_1 ℓ1 ),对抗损失,感知损失,以及风格损失的轮廓判别器对轮廓图片进行判别:
L G 2 = λ ℓ 1 L ℓ 1 + λ a d v , 2 L a d v , 2 + λ p L p e r c + λ s L s t y l e λ ℓ 1 = 1 , λ a d v , 2 = λ p = 0.1 , λ s t y l e = 250 \mathcal{L}_{G_2} = \lambda_{\ell_1}\mathcal{L}_{\ell_1} + \lambda_{adv, 2}\mathcal{L}_{adv, 2} + \lambda_{p}\mathcal{L}_{perc} + \lambda_{s}\mathcal{L}_{style} \\ \lambda_{\ell_1} = 1, ~ \lambda_{adv, 2} = \lambda_{p} = 0.1, \lambda_{style} = 250 LG2=λℓ1Lℓ1+λadv,2Ladv,2+λpLperc+λsLstyleλℓ1=1, λadv,2=λp=0.1,λstyle=250
译者注:可以写成与 Edge Generator 部分相对称的形式,同样有:
min G 1 max D 1 L G 1 = ( λ ℓ 1 L ℓ 1 + λ a d v , 2 max D 1 ( L a d v , 2 ) + λ p L p e r c + λ s L s t y l e ) λ ℓ 1 = 1 , λ a d v , 2 = λ p = 0.1 , λ s t y l e = 250 \min\limits_{G_1} \max\limits_{D_1} \mathcal{L}_{G_1} = \bigg( \lambda_{\ell_1}\mathcal{L}_{\ell_1} + \lambda_{adv, 2} \max\limits_{D_1}(\mathcal{L}_{adv, 2}) + \lambda_{p}\mathcal{L}_{perc} + \lambda_{s}\mathcal{L}_{style} \bigg) \\ \lambda_{\ell_1} = 1, ~ \lambda_{adv, 2} = \lambda_{p} = 0.1, \lambda_{style} = 250 G1minD1maxLG1=(λℓ1Lℓ1+λadv,2D1max(Ladv,2)+λpLperc+λsLstyle)λℓ1=1, λadv,2=λp=0.1,λstyle=250
4. 实验部分
4.1. 轮廓信息与图片掩膜层
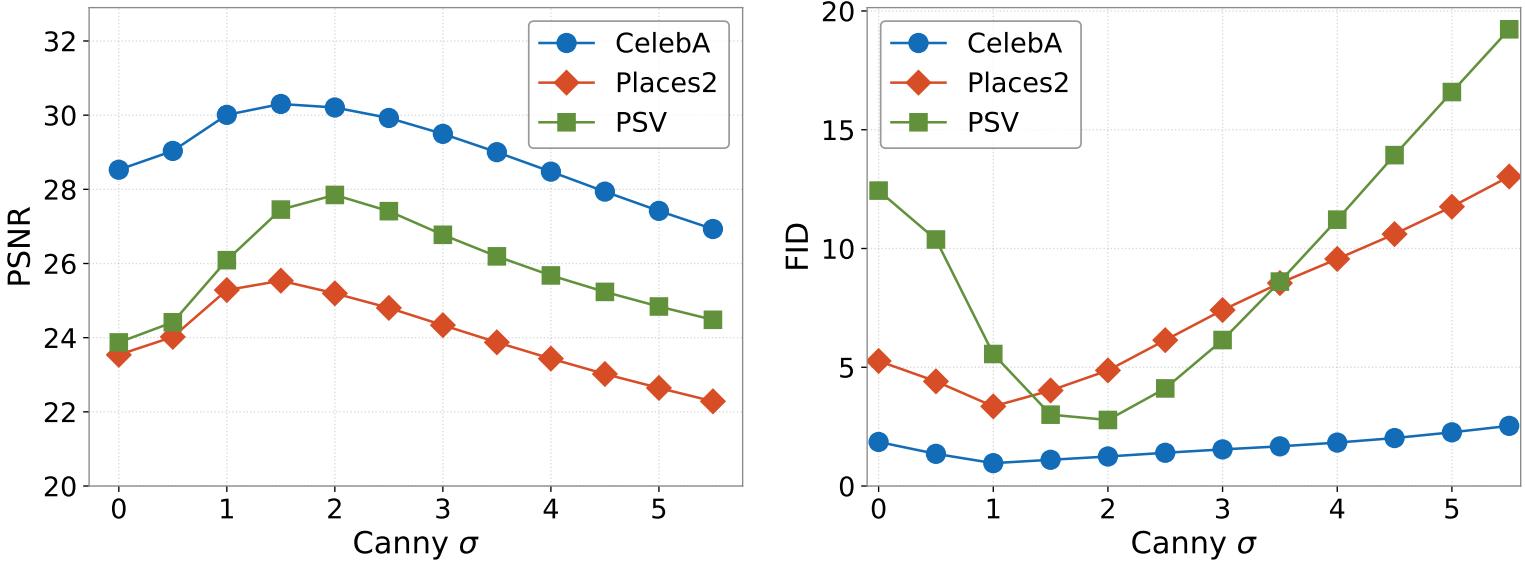
使用 Canny 边缘(轮廓)检测算法,得到轮廓二值图,然后使用高斯模糊对轮廓图片进行处理,发现当高斯模糊的参数 σ ≈ 2 \sigma \approx 2 σ≈2的时候,恢复效果最好。。。省略测试详细内容。。。
4.2 训练设置与训练策略
使用 PyTorch,图片尺寸为 256x256,批次大小为 8,使用 Adam optimizer( β 1 = 0 , β 2 = 0.9 \beta_1 = 0, \beta_2=0.9 β1=0,β2=0.9)。
G 1 G_1 G1使用 Canny 边缘轮廓检测算法,在学习率为 1 0 − 4 10^{-4} 10−4 下进行训练,直到损失下降到平坦表面 (until the losses plateau)。接着修改学习率为 1 0 − 5 10^{-5} 10−5,同时对 G 1 , G 2 G_1, G_2 G1,G2 进行训练,直到收敛。最终,我们将 D 1 D_1 D1移除,然后在学习率为 1 0 − 6 10^{-6} 10−6下,对 G 1 , G 2 G_1, G_2 G1,G2 进行端到端的训练,直到收敛。判别器的学习率为生成器的十分之一。
5. 结果(省略)
5.1 定性的分析(省略了论文对比较结果的点评与分析)

5.2 定量的分析(省略了论文对比较结果的点评与分析)
使用了四个对比指标:
- ℓ 1 \ell_1 ℓ1 范数 Norm (mathematics) - Wikipedia (Absolute-value norm)
- FID Fréchet Inception Distance - 知乎 尹相楠
- SSIM 结构相似性 Structural SIMilarity - Wikipedia
- PSNR 信噪比 Peak Signal-to-Noise Ratio - Wikipedia
参与比较方法,如下:
- CA Contextual Attention
- GLCIC Globally and Locally Consistent Image Completion
- PConv Partial Convolution (NVIDIA 的部分卷积)
- EdgeConnect (这篇论文的方法)
- EdgeConnect with Canny Edges Priori (将 Canny 边缘轮廓检测图作为先验)
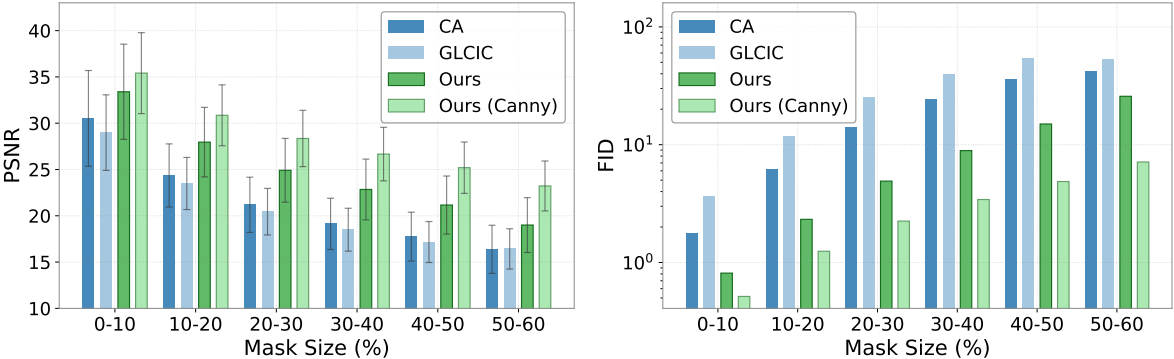
对比结果如下方表格 1,与下方图 5。
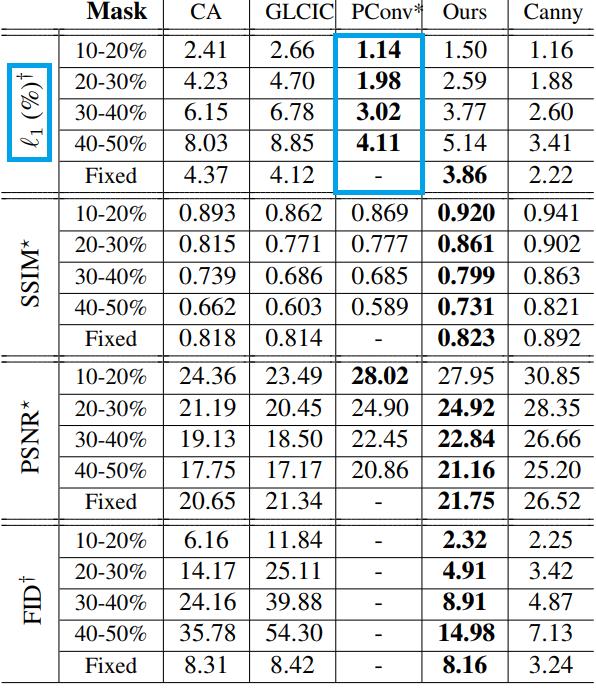
我的看法:值得注意的是表格 1 中蓝色方框的内容,尽管对于 L1 范数指标,PConv 要高于此论文的 EdgeConnect 方法,但是这并不意味着在 L1 范数指标下 这篇论文的方法不如 PConv。相反的,结合这张表格给出的其他指标,EdgeConnect 总体来说要优于 PConv,这使得 L1 范数的对比结果,反而从侧面佐证了 EdgeConnect 产生的结果要比 PConv 的结果更加清晰 的观点。
某些的神经网络 使用了 L1 范数作为图像重构,并搭配上其他损失 直接对生成器进行优化,可能是导致生成的图片模糊的原因(Context Encoder 的论文里面分析过这个问题),想看这篇论文的话,点击此处→ Context Encoders 论文的阅读与翻译,然后 Ctrl +F 定位到关键字 “安全”“预测缺失值的平均分布是更加 “安全” 的做法” 用于评价重构损失的这句话。
**视觉图灵测试 Visual Turing Tests(略)**让人类作为判别器,评估图片生成效果。
5.3 模型简化测试 Ablation Study(略)
完整的模型 与 删去轮廓假想图的模型(略)(其实相当于下一行的 Canny 边缘轮廓检测算法,输出空白的轮廓图片的情况)
使用 Canny 边缘检测算法,在不同的 σ \sigma σ\sigma 值下,产生不同的边缘轮廓进行比较,如下方图 7,结论是当 \sigma 减少到 3(边缘数量增加到某个程度的时候),生成图片的效果不再增强。

更换边缘轮廓检测(算法)系统,如图 8,结论是 我们没有得到明显的差异。
- Canny Edges Detection Algorithm, Canny 边缘检测算法(被 OpenCV 收录的经典算法)
- Holistically-Nested Edge Detection (HDE),整体 - 邻域 边缘检测系统(一个全卷积网络)

6. 讨论与未来的工作(省略)
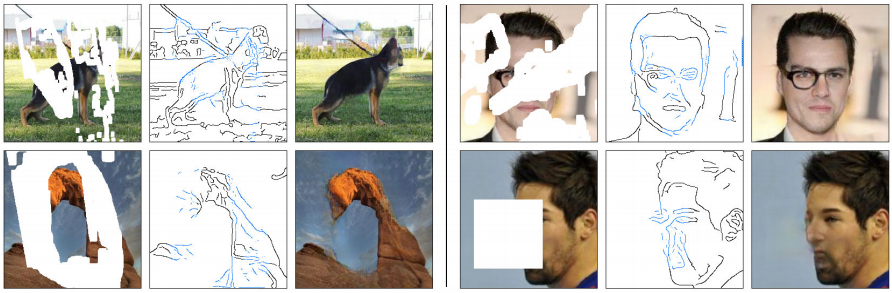

我的看法:恢复的结果,比如上面的狗,我们人类可能根据拴着的链子,能先判断它可能是狗,再从脑海中想象出一个狗头,最后脑补上去。而这机器恢复的图片,小图看起来像是猫(因为它没有尖尖的嘴巴)。另外受到神秘东方力量影响的单个黑框眼镜,与不符合牛顿力学的金拱门,以及有点抽象派画风的侧脸(可能是打网球的德约科维奇吧)。
现在还不能简单地说这些图片恢复得不好,而是因为这些图恢复得过于奇幻了。可能是因为机器缺乏人类常识才造成了这种违和感。
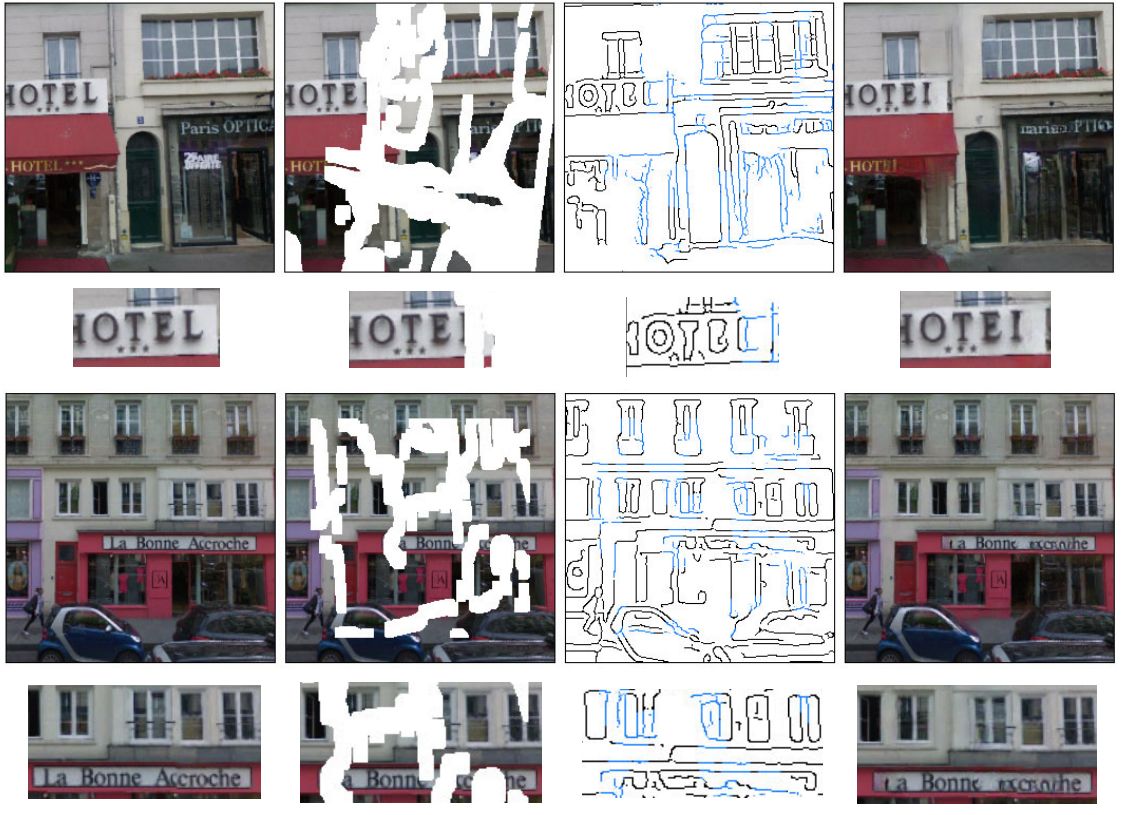
关**于缺乏人类常识(例如某种语言的单词)**的机器恢复效果分析。
第一个例子,L→I,看来这是在没有学过英字母的情况下,比较合理的恢复了。而作为人类的我在具备人类常识的情况下,能够猜测出这个单词是 HOTEL,做到正确脑补。第二个例子,它是上下文编码器里面用到的一幅图片,里面的服装店名字是 la bonne accroche,在没有学过法语的情况下(比如我),也和机器一样无法正确恢复出来。
看来现阶段,影响图片修补结果质量的一部分因素,就是 “缺乏人类常识了”。
另外,可以用它做风格迁移。
图 A 与图 B 画风不同。保留 A 图的左半图,选择 B 图的右半图进行边缘检测,得到边缘 B 右半图,这样就能得到拥有风格 B 的结构,风格 A 的画风,的右半图了,如下方图 10。
我的看法:其实可以实现完整的风格迁移,将上面的过程,照着右半图重复一遍,就能得到将以 B 图为骨架(边缘轮廓),以 A 图为画风的图片。图 10 中的第五列图片 A 画风与 B 边缘,不是论文原文的内容 ,而是我选取第四列的右半图,进行水平翻转后得到左半图,与原始右半图拼合得到的图片。本来的操作应该是以 A 图右半图的画风,加上 B 图左半图的轮廓,得到左半图的画面才对,但是现在我还没有时间复现这篇论文。

还可以做许多事情,如下方图 11:
- 物体移除(广义上的大神帮我把某物 P 掉)
- 物体调整(广义上的大神帮我把某物 P 好看点)

附录(省略)
A. 网络架构
- 生成器
- 判别器
B. 实验结果(数据集)
- 边缘生成器准确度
- 完整的结果
- 其他的边缘检测系统的结果
代码中的 model123,其中 model 3 是端到端的进行训练的吗,还有 joint model 和 model3 有什么区别?
文章训练了两个网络,分别是 3.1. Edge Generator 以及 3.2. Image Completion Network。分别 这两个网络的训练后,会将这两个网络连接起来,组成完整的网络进行联合训练。文章中的 4.2. Training Setup and Strategy 详细记录了训练流程。
破损图像是怎么生成的呢?
「生成随机掩膜层」论文原文似乎没有提供随机生成图片删去区域的算法,再加上私信问我的人太多了,几乎是点赞数量的一半。所以由我来提供这个算法: Github Yonv,生成随机的掩膜层 DEMO_generate_random_mask.py。运行效果如图:

算法原理是:使用三个点确定贝塞尔曲线,然后在生成的曲线上绘制大小变化的圆形,从而得到连续的随机区域(Mask:保留区域赋值为 1,删除区域为 0)。Image * Mask 得到破损图片。当然,你可以将圆形笔触调整为矩形获得其他风格的缺失区域,也可以调整笔触的绘画间隔,牺牲笔触效果用以追求极致的程序运行速度。

















 327
327











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











