










 本文深入探讨了分支定界算法在整数规划中的应用,包括基础版算法、分支与定界步骤、策略选择及剪枝技巧。介绍了如何通过松弛问题寻找下界,以及何时进行分支和剪枝操作。此外,还讨论了不同分支策略如深度优先、广度优先和最优优先,并提到了启发式算法在求解整数可行解中的作用。最后,概述了一般分支定界方法在非线性混合整数规划中的应用。
本文深入探讨了分支定界算法在整数规划中的应用,包括基础版算法、分支与定界步骤、策略选择及剪枝技巧。介绍了如何通过松弛问题寻找下界,以及何时进行分支和剪枝操作。此外,还讨论了不同分支策略如深度优先、广度优先和最优优先,并提到了启发式算法在求解整数可行解中的作用。最后,概述了一般分支定界方法在非线性混合整数规划中的应用。
目录
运筹我们最先接触分支定界算法,也就是由Land Doig和Dakin在20实世纪60年代初提出的branch and bound算法,用在整数规划(全部决策变量是整数)中。其实用在混合整数规划(部分决策变量是整数)中也是可以的(本身混合整数规划就能够转化为整数规划)。
目前很多求解器,如cplex和gurobi就是基于分支定界算法框架设计的。
没错,分支定界只是框架。
1.基础版的分支定界算法(假设是min问题)
首先阐述下分支定界算法的思路。不像纯粹的LP问题,可行域是无限的多面体。整数规划的可行域是由一系列点组成的,直观的思路是一个个列举点,但这显然不现实。于是我们的思路是,首先找到凸包,即围绕这一系列点的最小的多面体。松弛该问题求解,假如是整数解,也就是说整数规划等同于线性规划(具有整数最优性,即系数矩阵是全幺模矩阵)。假如不是整数解,那么我们把该凸包划分为一系列的小多面体进行求解。
也就是说核心的思路是不断切分,把可行域分成较小子区域的方法。但是不能无限的切分探测下去,不然会求解很久。因此我们面对一些不可能产生更好的区域,直接舍弃。即进行剪支操作(prune)。
接下来介绍几个定理(以下假设为min问题,因为min问题比较常见,假如是max问题,直接取镜像即可):
(1)若上界和下界相等,且上界是整数可行解,那么上界对应的可行解就是最优解。
备注:假如上界和下界差距为,即上界-下界
,那么称上界对应的可行解是一个
近似最优解。最优解显然是
=0的情况。
(2)若松弛的LP不可行,那么对应的IP也不可行;
若LP的最优解满足整数可行性条件,那么LP的最优解也是IP的最优解。
(3)假如松弛的LP问题产生的解的质量弱于IP问题,对于min问题,即LP的解>IP的解,那么直接舍弃。因为不可能产生更好的解了,松弛LP的子问题肯定比它更差。
2.分支定界算法的步骤及其注意事项
根据上述定理可以进行branch分支和bound定界操作。
2.1 具体的分支定界方法的步骤:
先对问题A进行松弛,也就是整数决策变量松弛为连续型变量,对线性规划问题B进行求解,得到问题的下界(线性规划问题约束更少,因此可行域更大,会取到不弱于IP的解)。IP问题的解一定不好于LP的解,一定是。
若LP问题满足整数条件,那么恭喜,在这里就找到了最优解。停止。(这条是针对初始问题而言的)。
同时人工观察一个可行解(满足整数约束)上界,或者直接定为无穷大也可以。
注解:这里是min问题,因此可以总结为:
所有IP问题的最好的解即为上界,即min{f(整数可行解)}为上界;
而所有LP问题的最好的解为下界,即min{f(LP可行解)}。
2.2 迭代过程,也就是分支定界方法的核心操作:
a) branch 分支:在B(LP问题)中找到不满足整数条件的,然后对其向下取整B1和向上取整B2,分为两支。注意,此处并不会丢失任何整数可行点。
b) bound 定界:对每个后续问题为一个分支表明求解结果,与其它问题的解比较。
松弛问题的目标函数最小者记为新的下界;
从符合整数条件的各分支中,找到最小的可行解作为新的上界,若没有整数可行解,还保持旧的上界不变。
c) cutoff 比较与剪枝——可以提升效率,不必像枚举法一样使得二叉树以2的幂级膨胀,同时不断剪枝,使得目前的搜索树增长得慢一些,3种场景可以剪支:
prune by bound,边界剪支。若最优解大于等于上界,剪掉这支。因为是最小化问题,那么新支得到的解(无论是否是整数解,假如是LP解,因为对应的IP问题的解会更大;假如是IP,因为有比它更好的解。实际编程求解的时候只用看LP即非整数解即可,因为IP解的意义其实在于确定上界,该点质量不足以改变上界,会被忽略)会大于目前的上界,这个分支都可以不考虑。这种情况基本出现在后续迭代过程中,通过不断剪枝缩减树叶规模。
prune by optimility,最优性剪支。若求解该节点得到的解为整数解,那么也可以减掉该支了,因为该支已经求解完毕。
prune by infeasiblity,不可行剪支。若LP问题无解,那么可行域更小的IP更无解了,剪去此支。
以上三条为剪支的三种情形。
也就是说分支定界的精髓在于分支和定界过程,使得算法的求解效率高于枚举法,同时求解结果和枚举法一样。
这种方法十分好用,因此目前大规模问题中,使用的框架都是分支定界(这里的分支指的是一组变量,并不是前述中的单变量分支了)算法。每步只求解一个子问题,然后比较再放入到主问题中去,最后找到比较好的解。这部分留到第三部分讲。
2.3 分支策略:
分支定界法的影响点主要是选择哪一个子问题进行分支?也就是说从搜索树中剩下的节点(子问题)中选择的节点会影响整个分支定界的收敛速度。比如同时碰到x1=1.55;x2=2.55,选择哪条支进行分支呢?
常用的策略是近0.5规则,也就是谁离0.5近,选择谁分。
min_diff = 100
for var_name in current_node.branch_var_list:
if (abs(current_node.x_sol[var_name] - 0.5) < min_diff):
branch_var_name = var_name
min_diff = abs(current_node.x_sol[var_name] - 0.5)
print(var_name, ' = ', current_node.x_sol[branch_var_name])当然一般意义上,有三种搜索策略:
a) 广度优先Breadth-First:也叫地毯式搜索。
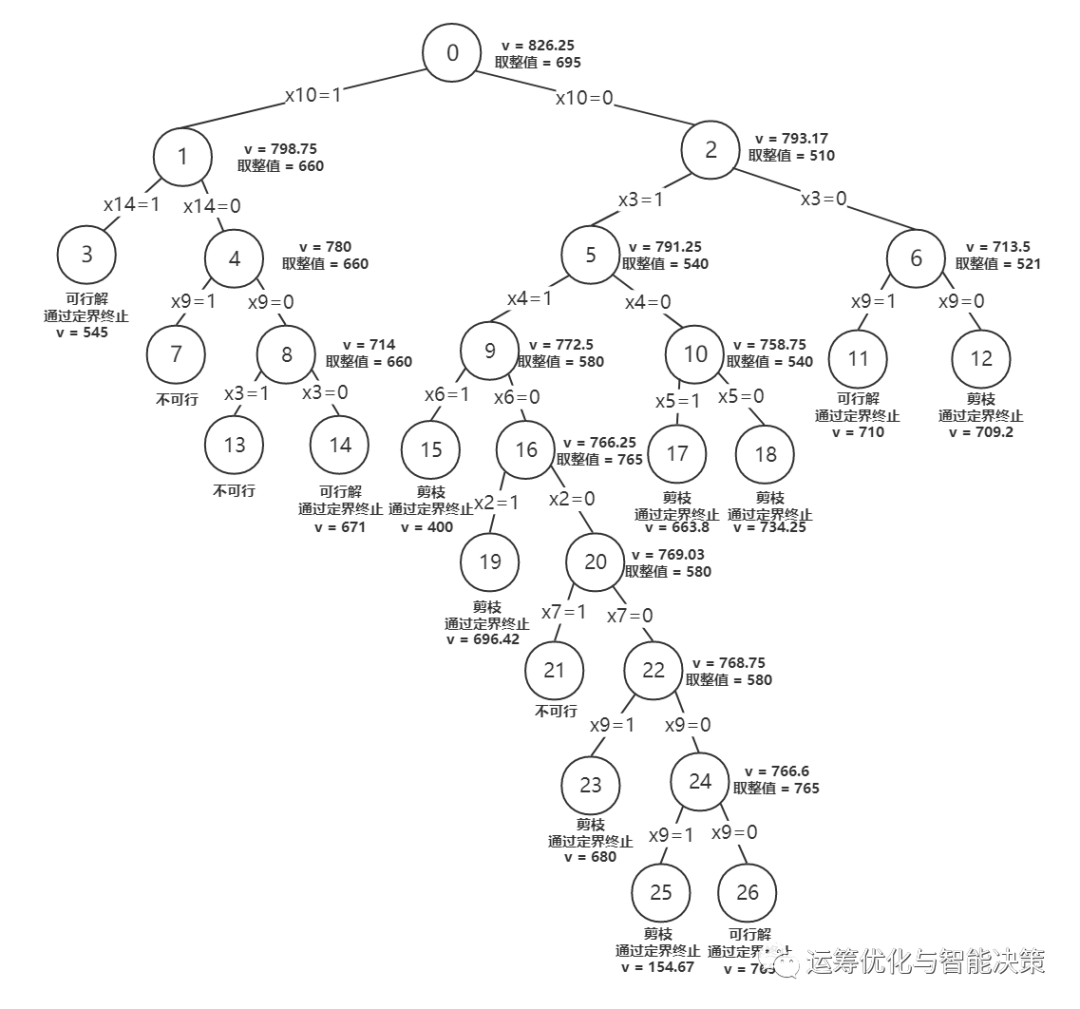
b) 深度优先Deep-First:先对某条支进行搜索。对分支定界树的层数(已分支变量的个数)定位节点的深度,优先选择具有最大深度的节点进行分支,也就是单条路一直走到尽头。储存的信息会相对少些。(以下为示例,默认先搜索左节点)
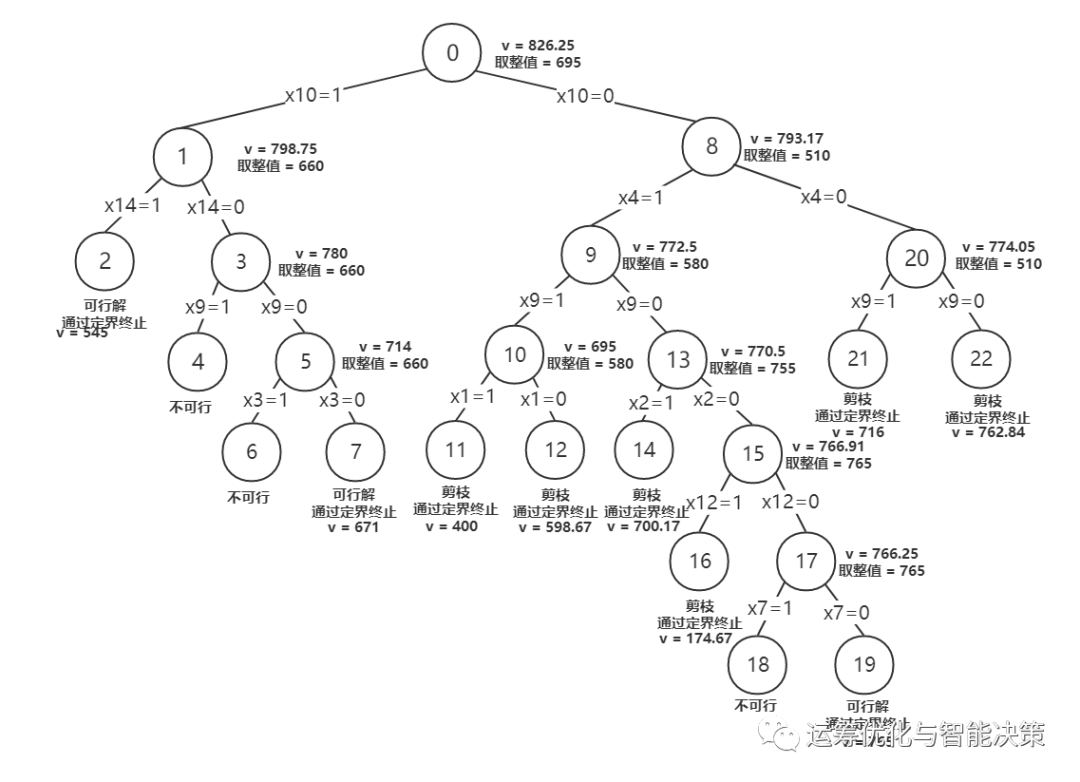
c) 最优优先Best-First:启发式搜索。先对下界最小的节点进行分支,那么它对应的IP问题取得更好上界的可能性就更大。好处在于存储的节点个数最小,但是选择节点的方式是“跳跃式”的,需要储存的信息很多。
2.4 求整数可行解的方法:
比如设计出合理的启发式算法,如贪婪法;其它启发式或元启发式算法;然后将启发式的解通过callback函数推送给gurobi。也能够在比较和剪枝的过程中剪掉一部分枝,也能大大提高求解效率。
3.一般的分支定界方法
一般的非线性混合整数规划(MIP),比如:
其中,f,g_{i},和h_{k}是n维实数集中的实值函数,是一个整数集合。
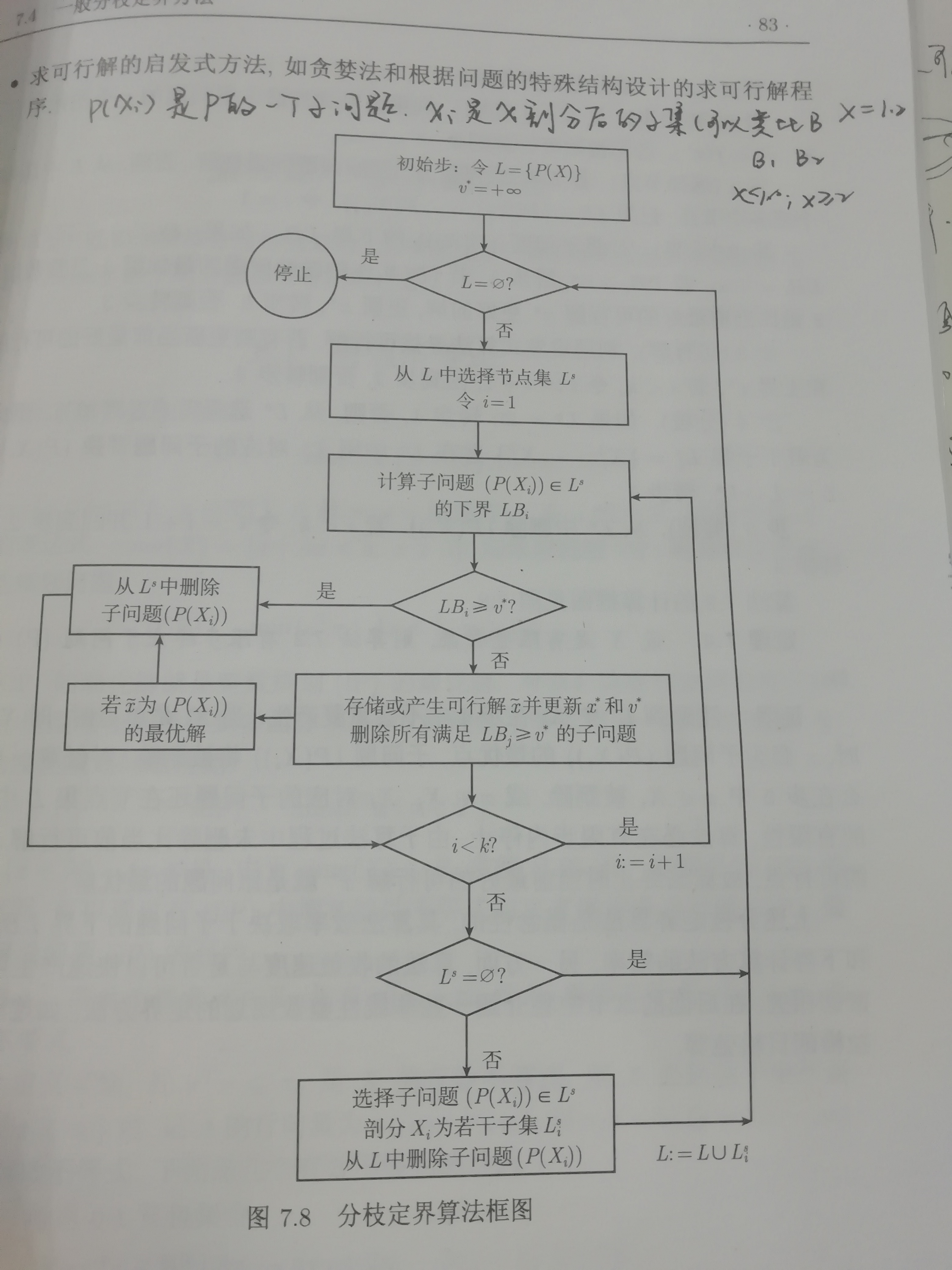
一般的求解框架为:
对问题定界的方法:比如凸整数规划问题的连续松弛、线性下逼近方法、可分离整数规划的拉格朗日松弛和二次0-1规划的半正定(SDP)松弛算法等等。
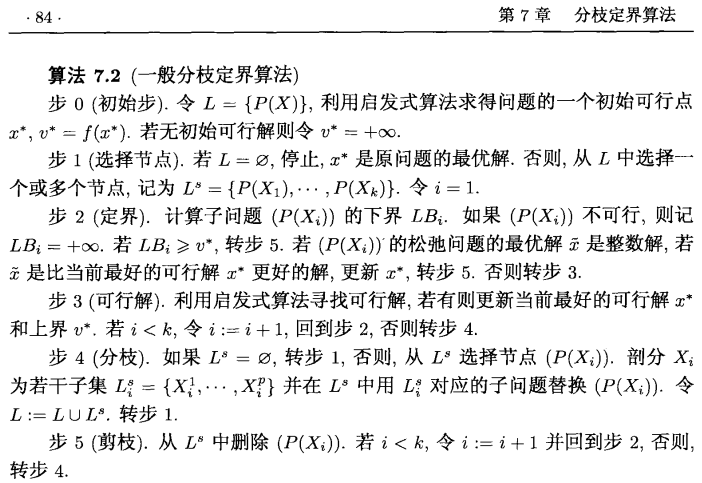
还有设计求可行解的启发式算法,如贪婪法和根据问题的特殊结构设计的求可行解程序。
分支定界算法框架的具体步骤为:
L记为分支定界树中存储的节点(子问题)的集合。所以会涉及到添入(增加节点)和删除(剪枝)。
4.编程关键
在实际编程的时候,
branch分支操作比较简单,可以通过添加约束来实现。但是branch的策略,比如选择深度,广度,还是最优,还是最基础的靠近0.5等策略需要斟酌确定,很可能需要反复推演对比。
会利用到ub=min{f(整数可行解)},lb=min{f(非整数可行解)}。这点很好用,因此我们需要标注每一个节点(即子问题)的上下界情况。对于IP问题,该点的上下界即本身obj;不是整数解即小数解,上界=全局上界,下界=本身obj。同时我们需要对比每个点的上下界与全局上下界的关系,判断对该点进行剪支,或是进行更新全局上下界的操作。
终止条件通常有两个,一个是所有的节点探测完毕,我们通常会用Queue来标注当前需要探测的节点;另一个是上下界相等或是相距,也可以终止。
通常最好的整数解我们标记为incumbent_node,该点即是gurobi求解信息的incumbent那一列,也是我们最终输出的整数解。其实它的本质就是min{所有的整数可行解}(其实在实际操作中只需要对比(该点的上界<全局上界)否即可,因为全局上界是不断更新的,存储的就是先前最好的整数解)。
编程的基本思路是:
(1)首先将原模型A松弛为B模型,先copy原模型,再relax即可。
(2)计算该点的解,更新全局上下界信息。上界=inf,下界即该点的解。把该点放在Quene队列中。
(3)判断终止条件,若满足,终止输出;若不满足,继续下述步骤。
(4)从Quene中拿出节点进行求解,若求解出不可行解,剪断该支(不可行剪支);若求解出的是最优解,那么继续下述步骤。
(5)判断该解是否整数解:若是整数解,更新当前节点的上下界;假如该点是当前最好的整数解,即比较当前整数解的obj<全局上界否,若成立,标记该点为incumbent_node,同时更新全局上界;同时剪断该支(最优性剪支)并返回(3)。若不是整数解,即小数解,那么执行下述步骤。
(6)更新该点的上下界信息,即下界=当前节点的信息,上界=全局上界;同时对比该点的解是否>全局上界,若是,剪断该支(边界剪支);若并没超,那么该点可以继续执行分支branch操作。
(7)branch操作,按照分支策略选择需要分支的变量或者变量集合;然后将当前节点复制两个,分别添加不同的整数约束(也可以添加边界约束);然后放在Quene队列中。
(8)遍历Quene队列的模型,看是否有更好的下界,即下界提升否,然后返回到(3)。
现在用在大规模求解IP和MIP的精确算法,比如branch and price和branch and cut算法都是基于分支定界算法框架而设计的。
比如branch and price算法,是在基本的branch and bound的基础上,在求解子节点松弛问题的时候采用列生成的方法,别的都没变。原始的基础的branch and bound中子节点松弛问题的求解直接采用的是单纯形法或内点法。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









