







模型预测控制MPC
因本人刚开始写博客,学识经验有限,如有不正之处望读者指正,不胜感激;也望借此平台留下学习笔记以温故而知新。这一篇文章介绍的是控制理论中的模型预测控制算法。
模型预测控制简介
模型预测控制MPC是指:在每一个采样时刻通过求解一个有限时域的开环最优控制策略,是一种通过将过程的当前状态作为最优控制问题的初始状态,解得的最优控制序列只实施于下一时刻的控制方法。
模型预测控制原理
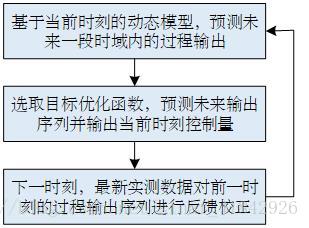
预测控制算法的三要素:内部预测模型,滚动优化,反馈校正。
预测模型:根据被控对象的历史信息和未来输入信息,预测系统的未来输出响应;
滚动优化:通过某一性能指标的最优化求解未来有限时刻的最优控制率;
反馈校正:首先检验对象的实际输出,再通过实际输出对基于模型的预测输出进行修正并进行新的优化。
典型的MPC流程图:
基于非参数模型的预测控制代表算法
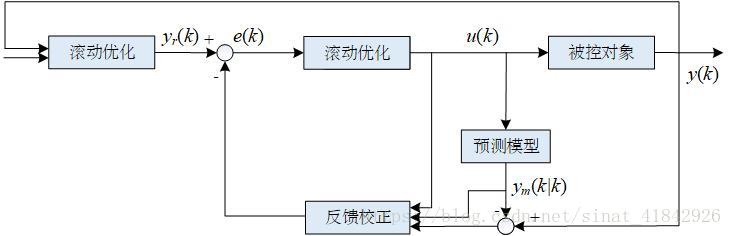
模型算法控制 MAC
目的:使系统的输出沿着预先给定的参考轨迹逐渐到达设定值。
算法组成:预测模型、反馈校正、参考轨迹、滚动优化
其预测模型输出由两部分组成:过去已知控制量产生的预测模型输出、由现在和未来控制量产生的预测模型输出。
MAC算法原理图:
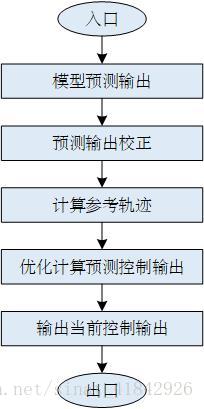
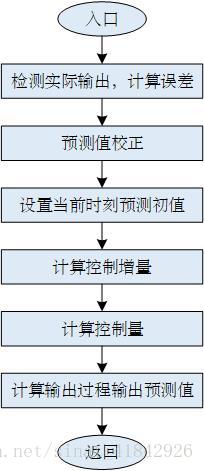
MAC在线计算程序流程图:
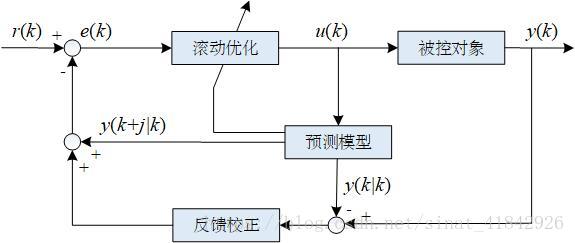
动态矩阵控制 DMC
算法组成:阶跃响应模型预测、反馈校正、滚动优化
其预测模型输出由两部分组成:待求解的未知控制增量产生的输出值、过去控制量产生的已知输出初值。
DMC算法原理图:
DMC在线计算程序流程图:
MPC算法的特点
模型要求不高,不需要深入的了解过程内部机理;
适用约束条件、大纯滞后、非最小相位及非线性等过程;
滚动优化策略能弥补外部因素引起的不确定性,动态性能较好;
缺点:不能描述不稳定系统,不适用于不稳定对象;系统模型在线辨识比较困难。
MPC算法的个人理解
通过内部的某种机制进行系统的在线辨识,以获得动态的状态方程,然后根据当前时刻的状态方程去获得后面一段有限时域内多个时刻的控制输入,并使用预测序列的第一个时刻控制量,如此往复,其本质就是不停的预测系统参考输入。
参考文献
自动控制原理与技术研究 孔宪光.殷磊著。
http://www.docin.com/p-100117827.html?docfrom=rrela
《无人驾驶车辆 模型预测控制》百度网盘链接:https://pan.baidu.com/s/1OMB3ghKOJlopzMPLMDawgQ















 784
784











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











