






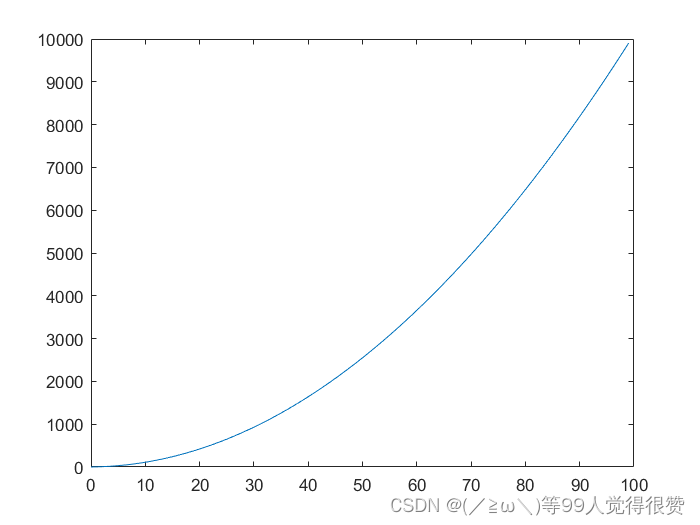
给定一个轨迹y=x^2+x+1,
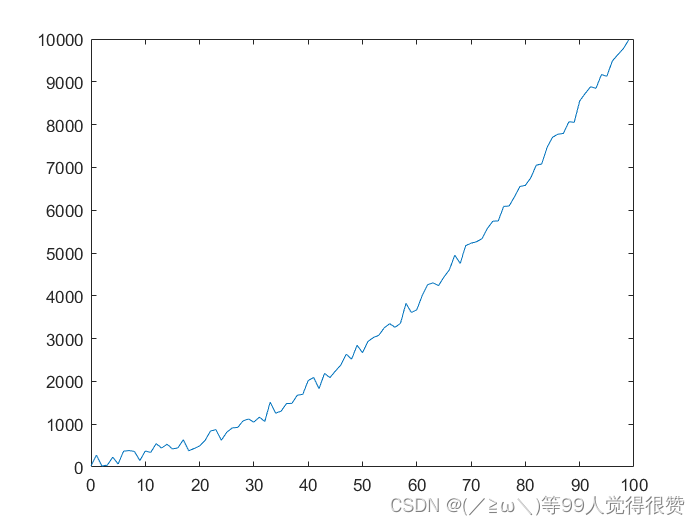
加上高斯噪声randn 后输入设计的卡尔曼滤波器,
使用当前测出的数据来修正预估值,理论上,
随着时间变久,数据增多,对轨迹的预测值会越来越准确。
%卡尔曼滤波测试
clc;
clear all;
%假设存在一个目标轨迹为 y=x^2+x+1,对其进行加噪声后再通过卡尔曼滤波器进行轨迹预测。
%取N个采样点
N=100;
x=0:N-1;
for i=1:N
y(i)=x(i)^2+x(i)+1;
end
%看看实际轨迹
figure(1);plot(x,y);
%加一个均值为0的白噪声。
y_zao=y+400*rand(1,N);
%看看加噪声后的轨迹
figure(2);plot(x,y_zao);
%构建滤波器,思路:用上一时刻的保留值计算出当前时刻的预估值,再用此时观测到的值对其进行修正,然后将修正后的值保留,即为跟踪的目标轨迹
%轨迹模板
temp=[1 1 1/2;
0 1 1 ;
0 0 1 ];
a=[];%保存每一时刻的 保留值
b=[];%用上一时刻的保留值计算出的此刻的 预估值
%y(i)表示此刻的 观测值
%直接假设初始加速度为2,初始速度为1,初始位置为1
a(1,1)=1;
a(2,1)=1;
a(3,1)=2;
b(1,1)=1;
b(2,1)=1;
b(3,1)=2;
for i=2:N
b(1,i)=[1 0 0]*temp*a; %预估值
b(2,i)=[0 1 0]*temp*a;
b(3,i)=[0 0 1]*temp*a;
if abs(y_zao(i)-b(1,i))<250
k=abs((y_zao(i)-b(1,i))/b(1,i)); %用差值比上预估值,相差不大时就使得k无限接近于0,即相信预估值
a(1,1)=b(1,i)+k*(y_zao(i)-b(1,i));
a(2,1)=b(2,i);
a(3,1)=b(3,i);
else
k=1;
a(1,1)=b(1,i)+k*(y_zao(i)-b(1,i)); %相差很大时就取实际观测值,表示此刻目标已经不以模板来运动了
a(2,1)=b(2,i);
a(3,1)=b(3,i);
end
end
%卡尔曼滤波追踪后的轨迹
figure(3);plot(x,b(1,:)); 原目标的运动轨迹为
接受到的加噪轨迹为
使用卡尔曼滤波目标追踪的轨迹为
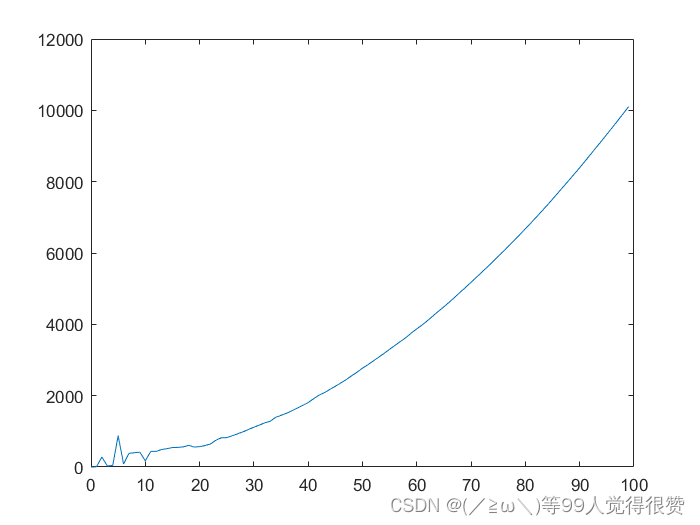
可以看到,最初由于数据量过小,存在跳变轨迹
随着数据量的增多
轨迹逐渐平滑且越来越接近真实的轨迹。
课程小作业
本人原创,仅供参考学习,用之点赞,欢迎讨论















 856
856











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









