










【前言】
本文首先介绍生成式模型,然后着重梳理生成式模型(Generative Models)中生成对抗网络(Generative Adversarial Network)的研究与发展。作者按照GAN主干论文、GAN应用性论文、GAN相关论文分类整理了45篇近两年的论文,着重梳理了主干论文之间的联系与区别,揭示生成式对抗网络的研究脉络。
涉及的论文有:
[1] Goodfellow Ian, Pouget-Abadie J, Mirza M, et al. Generative adversarial nets[C]//Advances in Neural Information Processing Systems. 2014: 2672-2680.
[2] Mirza M, Osindero S. Conditional Generative Adversarial Nets[J]. Computer Science, 2014:2672-2680.
[3] Denton E L, Chintala S, Fergus R. Deep Generative Image Models using a Laplacian Pyramid of Adversarial Networks[C]//Advances in neural information processing systems. 2015: 1486-1494.
[4] Radford A, Metz L, Chintala S. Unsupervised representation learning with deep convolutional generative adversarial networks[J]. arXiv preprint arXiv:1511.06434, 2015.
[5] Im D J, Kim C D, Jiang H, et al. Generating images with recurrent adversarial networks[J]. arXiv preprint arXiv:1602.05110, 2016.
[6] Larsen A B L, Sønderby S K, Winther O. Autoencoding beyond pixels using a learned similarity metric[J]. arXiv preprint arXiv:1512.09300, 2015.
[7] Wang X, Gupta A. Generative Image Modeling using Style and Structure Adversarial Networks[J]. arXiv preprint arXiv:1603.05631, 2016.
[8] Chen X, Duan Y, Houthooft R, et al. InfoGAN: Interpretable Representation Learning by Information Maximizing Generative Adversarial Nets[J]. arXiv preprint arXiv:1606.03657, 2016.
[9] Kurakin A, Goodfellow I, Bengio S. Adversarial examples in the physical world[J]. arXiv preprint arXiv:1607.02533, 2016.
[10] Odena A. Semi-Supervised Learning with Generative Adversarial Networks[J]. arXiv preprint arXiv:1606.01583, 2016.
[11] Springenberg J T. Unsupervised and Semi-supervised Learning with Categorical Generative Adversarial Networks[J]. arXiv preprint arXiv:1511.06390, 2015.
2. 生成式对抗网络,Generative Adversarial Networks
2.1 GAN的思想与训练方法
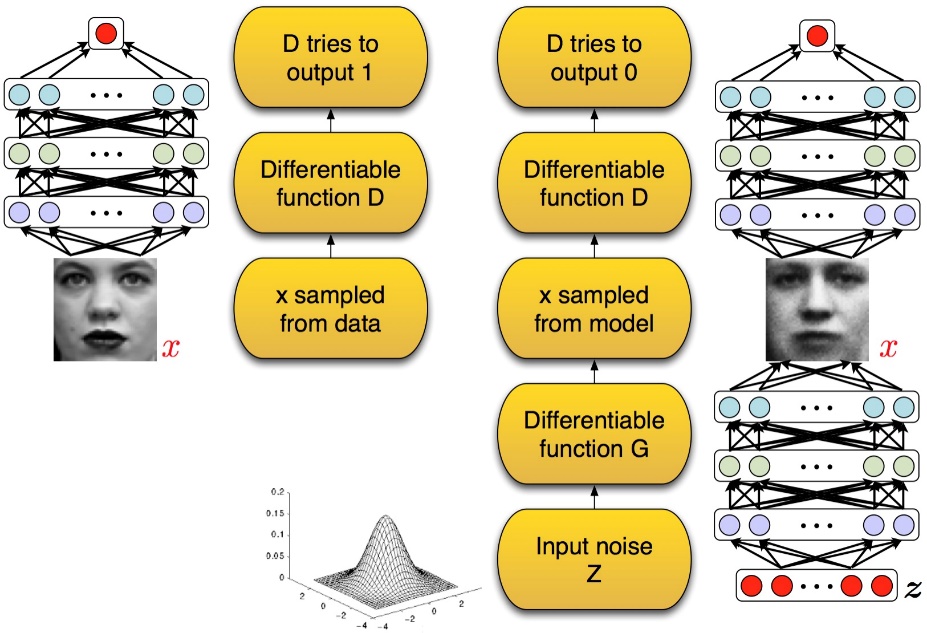
GAN[Goodfellow Ian,GAN]启发自博弈论中的二人零和博弈(two-player game),由[Goodfellow et al, NIPS 2014]开创性地提出。在二人零和博弈中,两位博弈方的利益之和为零或一个常数,即一方有所得,另一方必有所失。GAN模型中的两位博弈方分别由生成式模型(generative model)和判别式模型(discriminative model)充当。生成模型G捕捉样本数据的分布,判别模型是一个二分类器,估计一个样本来自于训练数据(而非生成数据)的概率。G和D一般都是非线性映射函数,例如多层感知机、卷积神经网络等。如图2-1所示,左图是一个判别式模型,当输入训练数据x时,期待输出高概率(接近1);右图下半部分是生成模型,输入是一些服从某一简单分布(例如高斯分布)的随机噪声z,输出是与训练图像相同尺寸的生成图像。向判别模型D输入生成样本,对于D来说期望输出低概率(判断为生成样本),对于生成模型G来说要尽量欺骗D,使判别模型输出高概率(误判为真实样本),从而形成竞争与对抗。
GAN模型没有损失函数,优化过程是一个“二元极小极大博弈(minimax two-player game)”问题:

这是关于判别网络D和生成网络G的价值函数(Value Function),训练网络D使得最大概率地分对训练样本的标签(最大化log D(x)),训练网络G最小化log(1 – D(G(z))),即最大化D的损失。训练过程中固定一方,更新另一个网络的参数,交替迭代,使得对方的错误最大化,最终,G 能估测出样本数据的分布。生成模型G隐式地定义了一个概率分布Pg,我们希望Pg 收敛到数据真实分布Pdata。论文证明了这个极小化极大博弈当且仅当Pg = Pdata时存在最优解,即达到纳什均衡,此时生成模型G恢复了训练数据的分布,判别模型D的准确率等于50%。
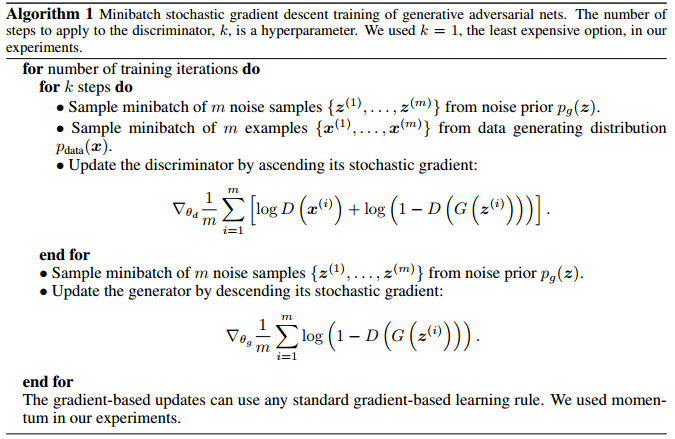
图2-2 生成式对抗网络算法流程
2.2 GAN的优势与缺陷
与其他生成式模型相比较,生成式对抗网络有以下四个优势【OpenAI Ian Goodfellow的Quora问答】:
- 根据实际的结果,它们看上去可以比其它模型产生了更好的样本(图像更锐利、清晰)。
- 生成对抗式网络框架能训练任何一种生成器网络(理论上-实践中,用 REINFORCE 来训练带有离散输出的生成网络非常困难)。大部分其他的框架需要该生成器网络有一些特定的函数形式,比如输出层是高斯的。重要的是所有其他的框架需要生成器网络遍布非零质量(non-zero mass)。生成对抗式网络能学习可以仅在与数据接近的细流形(thin manifold)上生成点。
- 不需要设计遵循任何种类的因式分解的模型,任何生成器网络和任何鉴别器都会有用。
- 无需利用马尔科夫链反复采样,无需在学习过程中进行推断(Inference),回避了近似计算棘手的概率的难题。
与PixelRNN相比,生成一个样本的运行时间更小。GAN 每次能产生一个样本,而 PixelRNN 需要一次产生一个像素来生成样本。
与VAE 相比,它没有变化的下限。如果鉴别器网络能完美适合,那么这个生成器网络会完美地恢复训练分布。换句话说,各种对抗式生成网络会渐进一致(asymptotically consistent),而 VAE 有一定偏置。
与深度玻尔兹曼机相比,既没有一个变化的下限,也没有棘手的分区函数。它的样本可以一次性生成,而不是通过反复应用马尔可夫链运算器(Markov chain operator)。
与 GSN 相比,它的样本可以一次生成,而不是通过反复应用马尔可夫链运算器。
与NICE 和 Real NVE 相比,在 latent code 的大小上没有限制。
GAN目前存在的主要问题:
- 解决不收敛(non-convergence)的问题。
目前面临的基本问题是:所有的理论都认为 GAN 应该在纳什均衡(Nash equilibrium)上有卓越的表现,但梯度下降只有在凸函数的情况下才能保证实现纳什均衡。当博弈双方都由神经网络表示时,在没有实际达到均衡的情况下,让它们永远保持对自己策略的调整是可能的【OpenAI Ian Goodfellow的Quora】。 - 难以训练:崩溃问题(collapse problem)
GAN模型被定义为极小极大问题,没有损失函数,在训练过程中很难区分是否正在取得进展。GAN的学习过程可能发生崩溃问题(collapse problem),生成器开始退化,总是生成同样的样本点,无法继续学习。当生成模型崩溃时,判别模型也会对相似的样本点指向相似的方向,训练无法继续。【Improved Techniques for Training GANs】 - 无需预先建模,模型过于自由不可控。
与其他生成式模型相比,GAN这种竞争的方式不再要求一个假设的数据分布,即不需要formulate p(x),而是使用一种分布直接进行采样sampling,从而真正达到理论上可以完全逼近真实数据,这也是GAN最大的优势。然而,这种不需要预先建模的方法缺点是太过自由了,对于较大的图片,较多的 pixel的情形,基于简单 GAN 的方式就不太可控了。在GAN[Goodfellow Ian, Pouget-Abadie J] 中,每次学习参数的更新过程,被设为D更新k回,G才更新1回,也是出于类似的考虑。
Reference
[1] Goodfellow Ian, Pouget-Abadie J, Mirza M, et al. Generative adversarial nets[C]//Advances in Neural Information Processing Systems. 2014: 2672-2680.
[2] 深度 | OpenAI Ian Goodfellow的Quora问答:高歌猛进的机器学习人生. 作者:Ian Goodfellow. 机器之心编译
[3] Barone A V M. Towards cross-lingual distributed representations without parallel text trained with adversarial autoencoders[J]. arXiv preprint arXiv:1608.02996, 2016.

















 416
416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









