









 本文详细介绍了传感器曝光的两种主要方式——逐行曝光和全局曝光,解释了它们的工作原理和应用场景。逐行曝光适用于静态图像,而全局曝光则能减少运动物体拍摄时的图像偏移。此外,文章还探讨了帧率、曝光时间和行时间的计算方法,以及如何通过调节相关参数来控制传感器的性能。
本文详细介绍了传感器曝光的两种主要方式——逐行曝光和全局曝光,解释了它们的工作原理和应用场景。逐行曝光适用于静态图像,而全局曝光则能减少运动物体拍摄时的图像偏移。此外,文章还探讨了帧率、曝光时间和行时间的计算方法,以及如何通过调节相关参数来控制传感器的性能。
转载连接http://www.360doc.com/content/20/1105/13/67063969_944236154.shtml
sensor曝光分为逐行曝光和全局曝光。逐行曝光的sensor 技术难度较全局曝光sensor 低,价格便宜,且分辨率较大,对于一些静态图像拍摄是不错的选择。
先看看,什么是帧?
简单来说,一帧就是一副图像。
具体地,在将光信号转换为电信号的扫描过程中,扫描总是从图像的左上角开始,水平向前行进,同时扫描点也以较慢的速率向下移动。当扫描点到达图像右侧边缘时,扫描点快速返回左侧,重新开始在第1行的起点下面进行第2行扫描,行与行之间的返回过程称为水平消隐(也叫行消隐,H_BLANK)。一幅完整的图像扫描信号,是由水平消隐间隔分开的行信号序列构成,称为一帧。
如下图所示,是一帧的结构图,在最下面部分有一部分是V_BLANK。V_BLANK的由来是因为扫描点扫描完一帧后,要从图像的右下角返回到图像的左上角,开始新一帧的扫描,会有一段间隔时间,这一时间间隔,叫做垂直消隐(也称场消隐,V_BLANK),V_BLANK的作用通常用来调节帧率。
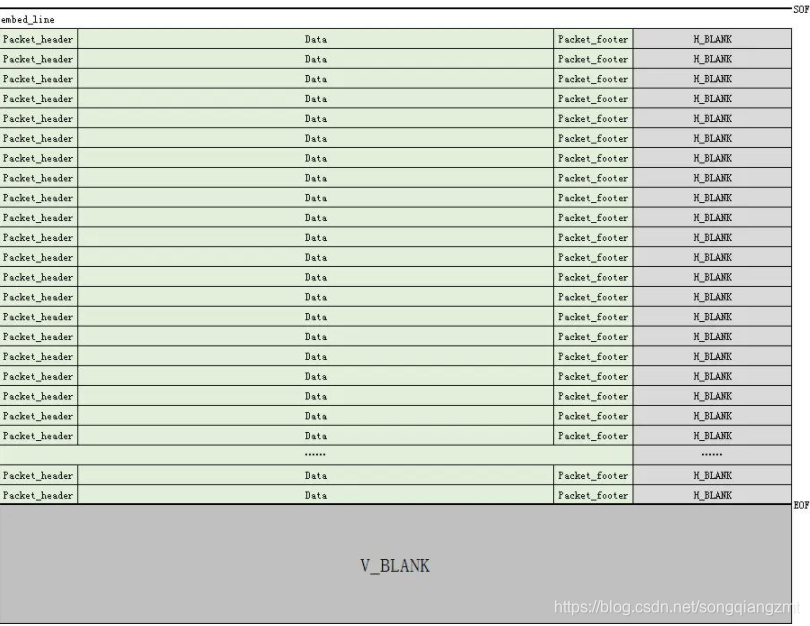
帧结构示意图
sensor逐行曝光基本原理
sensor逐行曝光从第一行开始曝光,一个行周期结束之后第二行才开始曝光。依次类推,经过N-1 行后第N 行开始曝光。第一行曝光结束后开始读出数据,读出一行需要一行周期时间(含行消隐时间,即H_Blank)。至第一行完全读出后,第二行刚好开始读出,依次类推,当第N-1 行读完后,第N 行开始读出,直到整幅图像完全读出。
sensor逐行曝光过程
sensor全局曝光基本原理
全局曝光Sensor的所有行同时开始曝光,并同时结束曝光,在曝光结束后,Sensor将所有电子从感光区转到存储区,之后逐行地读出像素数据。 这样曝光的好处是获得图像每一行的曝光时间比较一致,并且在拍摄运动物体时图像不会出现偏移和歪斜。
sensor全局曝光过程
与sensor曝光相关的计算
- line_time的计算:
line_time的计算公式:line_time = line_length / pclk
和这个公式相关的是下面三个变量的定义先说下
a). line_length: 一行的长度(包含h_blank)
b). pclk: 是控制像素输出的时钟,即pixel采样时钟,单位MHz。表示是每个单位时间内采样的pixel数量
c). line_time: 曝光一行的时间
所以,曝光一行的时间等于一行的长度除以曝光一个像素需要的时间。
如果你不能理解,简单类比一下我们小学学过的距离计算公式:路程 = 速度 × 时间。要计算小明跑完400米操场花了多长时间,是不是可以拿小明跑步的路程400米除以小明每秒钟跑步的距离来计算。那么,把跑道换成一个个排列起来的像素不也是一样的吗?linetime就相当于上面要计算的小明跑完400米要花的时间,line_length就相当于400米的路程,pclk就相当于跑步的速度,每个单位时间小明能跑多远。
- exposure_time的计算:
exposure_time的计算公式:exposure_time = exposure_line * line_time
同样和这个公式有关的几个定义先说下:
a). exposure_time: 曝光时间。指这一帧曝光了多长时间。
b). exposure_line: 字面意思是曝光行。值得注意的是,曝光行不是指一次性曝光多少行,对于逐行曝光的sensor来说,永远都是一次曝光一行。所以,曝光行是指这一帧曝光了多少行。
c): line_time: 曝光一行的时间
所以,可以用line_time即曝光一行的时间,乘以曝光了的行数exposure_line,等于整个曝光花费的时间。
注:
-
调节exposure_time曝光时间是通过写exposure_line寄存器实现的;
-
曝光时间以行长为单位
- fps帧率的计算:
frame_length = Vsync = Dummy Line = VTotal = VTS = V_Size + V_Blank // 帧长; 不占用曝光时间
line_length = Hsync = Dummy Pixel = HTotal = HTS = H_Size + H_Blank // 行长; 会增加曝光时间
fps的计算公式:fps = pclk / (VTS * HTS )= pclk / (frame_length * line_length) = 1 / (frame_length * line_time)
注:fps即表示1秒内帧数,此公式中line_time单位是秒
同样和这个公式有关的几个定义先说下:
a). pclk: 是控制像素输出的时钟,即pixel采样时钟,单位MHz。表示是每个单位时间内采样的pixel数量
b). frame_length: 一帧的行数(包含v_blank)
c). line_length: 一行的长度(包含h_blank)
这里frame_length * line_length的意思是用一帧的行数乘以一行的长度,即相乘得到一帧图像总共有多少像素。pclk是像素时钟,单位是MHz。如100MHz,就表示每秒钟可以采集100M个像数。用pclk除以frame_length * line_length两者之积,即是算1秒钟内采集的100M个像数点可以分成多少帧(frame_length * line_time = 曝光一帧的时间)。
注:
1). line_time一组setting只有一个值,一般是不变的,可看做常数,所以调节帧率是通过写frame_length寄存器,即调节frame_length实现的。
2). 同理,回到上一个知识点 2. exposure_time的计算:可以发现,exposure_time = exposure_line * line_time,而line_time一般是常数。所以,调节exposure_time曝光时间是通过写exposure_line寄存器实现的,即通过写曝光实现。
4.其他相关:
dummy_line:用来填充v_blank的行
frame_offset:最小的dummy_line,即一帧曝光结束到下次准备好重新开始曝光的时间
frame_length = exposure_line + dummy_line
frame_length ≥ exposure_line +frame_offset
5.帧长的计算方式
回顾上述几点,我们知道一帧的计算方式:
1). frame_length(帧长) = exposure_line(曝光行) + dummy_line
2). frame_offset是指最小的dummy_line
- 索尼sony也有自己的计算方式,但是本质是一样的: (IMX307为例)
1). VMAX(帧长,同VTS一个概念) = exposure_line(曝光行) + (SHS1 + 1)
2). SHS1本意是表示Shutter释放的时机,以XVS信号为参照系,SHS1的值越大,说明Shutter释放得越晚,即dummy_line越大,曝光行越少. 该公式及说明记载于Datasheet p.77
3). 结合第5点和第6点,我们可以知道。dummy_line = SHS1+1
4). 对于IMX307这颗sensor来说,SHS1的范围为1~(VMAX-2),记载于Datasheet p.78的表格
即dummy_line的范围为2 ~ (VMAX-1), 即frame_offset的值为2

















 5167
5167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









