






SLAM基础知识汇总
特征点相关
特征点由关键点和描述子构成:
- 关键点:特征点在图像里的位置
- 描述子:通常是一个向量,描述了该关键点周围的信息,朝向大小等
[ORB-SLAM2] ORB-SLAM中的ORB特征(提取)https://zhuanlan.zhihu.com/p/61738607
ORB-SLAM中用到的四叉树:
划分为四个网格,每个网格内检测到的特征点在一定范围内(>1且<25),就继续划分网格,若网格中的特征点≤1,就不在继续划分网格。节点数量超过一定值就不再继续下分网格(30个),最后每个网格中保留response最大的特征点。
划分网格:
处理前后结果对比:
这样就能保证图片的特征点比较均匀。

计算机视觉相关
针对不同的条件和环境进行一系列划分:
- 已知 x 、 K 、 R 、 t ,求 X : 三角化( Triangulation )
- 已知 x 、 X 、 K ,求 R 、 t : 姿态估计( Pose Estimation )
- 已知 x 、 X ,求 K 、 R 、 t : 相机标定( Camera Calibration )
- 已知 x ,求 K 、 R 、 t 、 X : 稀疏重建( Sparse Reconstruction )
x:像素坐标,X:3D坐标,R相机旋转矩阵,t相机平移向量,K相机内参矩阵,R和t合起来是相机的外参矩阵T
消影点(vanishing points) :
空间平行线在图像投影线的交点, 对应三维空间中的无穷远点。消影点只与三维直线方向有关, 与其位置无关。
图像金字塔:
图像金字塔能解决FAST特征点缺乏尺度不变性的问题
(不管原图尺度是多少,在包含了所有尺度的尺度空间下都能找到那些稳定的极值点,这样就做到了尺度不变;即不管距离远或者近,提取看上去都是角点的点)
退化问题:
正常情况下基础矩阵模型应该可以应付,但如果特征点共面(初始化场景中主要是一个平面),或者两帧之间的相对位姿未纯旋转时,基础矩阵的自由度会下降,也就是所谓的退化,类似于方程数少于变量数。此时为了保证运动恢复的精度,就不能再用基础矩阵模型。由此提出了单应矩阵,其假设特征点落在同一平面上,从而适用于这种场景下的运动恢复。
齐次坐标:
简单说来,齐次坐标就是在原有的坐标维度上再添加一个维度。

齐次坐标的优势:
- 方便的表达点在直线或平面上
2D平面上,一条直线l可以用方程ax+by+c=0来表示,该直线用向量来表示记作
l=(a,b,c)^T
点p的齐次坐标为(x,y,1)
则点P在直线上就可以用内积(点乘)来表示
l^T*p=0
- 方便表达直线与直线,平面与平面的交点
结论:在齐次坐标下,可以用两个点 p, q 的齐次坐标叉乘结果来表达一条直线 l,也就是
l = p x q
也可以使用两条直线 l, m 的叉乘表示他们的交点 x
x = l x m
- 能够区分一个向量和一个点:
\1. 从普通坐标转换成齐次坐标时
如果(x,y,z)是个点,则变为(x,y,z,1);
如果(x,y,z)是个向量,则变为(x,y,z,0)
2.从齐次坐标转换成普通坐标时
如果是(x,y,z,1),则知道它是个点,变成(x,y,z);
如果是(x,y,z,0),则知道它是个向量,仍然变成(x,y,z)
- 能够表达无穷远
如果一个点的齐次坐标中,最后一个元素为0,则表示为无穷远点。
- 更简洁的表达欧氏空间变换
使用齐次坐标,可以方便的将加法转化为乘法,方便的表达平移。
向量点乘定义:
a * b = ||a||* ||b|| *cos(θ)
叉乘定义:
a * b = ||a||* ||b|| *sin(θ)*n
n为一个与向量a,b所构成的平面垂直的单位向量
相机模型:
像素点(u,v)与世界坐标点(x,y)的投影关系
这里的x,y为归一化坐标即x=X/Z,y=Y/Z
反投影则为:

曼哈顿世界假设
如下图所示,环境中存在垂直/正交的信息,如地板、天花板、墙面等。通过判断相机和曼哈顿世界之间的旋转矩阵,进而可以获得相机与相机之间的相对旋转矩阵。
https://zhuanlan.zhihu.com/p/190232333

位姿估计:
2D-2D 对极几何:

左右两个平行四边形分别是相机在不同位置的成像平面
C0, C1分别是两个位置中相机的光心,也就是针孔相机模型中的针孔。
P是空间中的一个三维点,p0, p1分别是P点在不同成像平面上对应的像素点(通过特征匹配得到)
c0-c1连线在成像平面上的交点为极点
极点和匹配点的连线就是极线
本质矩阵:
对极约束:

极线方程:
Ep1看做是直线的方程,p0看做是直线上的点,也就是说Ep1就是以C0为原点坐标系中的极线

根据对极几何定义,设x1,x2为特征点的归一化坐标,则他们满足:

经过对极几何已经求得相机运动R和t,需要求解特征点的深度s1,s2.
两个深度可以分开算,若先算s2,那么对上式两边左乘一个x1^,得:

该式左侧为0,右侧为s2的一个方程,可根据它直接求解s2。
3D-2D PNP算法
目前遇到的场景主要有两个,
其一是求解相机相对于某2维图像/3维物体的位姿;
其二就是SLAM算法中估计相机位姿时通常需要PnP给出相机初始位姿。
在场景1中,我们通常输入的是物体在世界坐标系下的3D点以及这些3D点在图像上投影的2D点,因此求得的是相机坐标系相对于世界坐标系(Twc)的位姿
在场景2中,通常输入的是上一帧中的3D点(在上一帧的相机坐标系下表示的点)和这些3D点在当前帧中的投影得到的2D点,所以它求得的是当前帧相对于上一帧的位姿变换
算法伪代码:
求解PNP问题的常用算法 DLT(直接线性变换),EPNP(把2D转换为3D点,用ICP求解),P3P(构建三角形),UPNP等
3D-3D ICP算法:
void pose_estimation_3d3d(const vector<Point3f> &pts1,
const vector<Point3f> &pts2,
Mat &R, Mat &t) {
Point3f p1,p2;
int N=pts1.size();
for(int i=0;i<N;i++)
{
p1+=pts1[i];
p2+=pts2[i];
}//获取质心坐标
p1=Point3f(Vec3f(p1)/N);
p2=Point3f(Vec3f(p2)/N);
vector<Point3f> q1(N),q2(N);//以质心坐标为原点的坐标系
for(int i=0;i<N;i++){
q1[i]=pts1[i]-p1;
q2[i]=pts2[i]-p2;
}
//计算q1*q2^T
Eigen::Matrix3d W = Eigen::Matrix3d::Zero();
for(int i=0;i<N;i++)
{
W+=Eigen::Vector3d(q1[i].x,q1[i].y,q1[i].z) * Eigen::Vector3d(q2[i].x,q2[i].y,q2[i].z).transpose();
}
//对W进行SVD分解
Eigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | EigenLLComputeFullV);
Eigen::Matrix3d U = svd.matrixU();
Eigen::Matrix3d V =svd.matrixV();
Eigen::Matrix3d R_=U*(V.transpose());
if(R_.determinant()<0){//行列式小于零
R_=-R_;
}
Eigen::Vector3d t_=Eigen::Vector3d(p1.x,p1.y,p1.z)-R_*Eigen::Vector3d(p2.x,p2.y,p2.z);
R=(Mat_<double>(3,3) <<
R_(0,0),R_(0,1),R_(0,2),
R_(1,0),R_(1,1),R_(1,2),
R_(2,0),R_(2,1),R_(2,2)
);
t=(Mat_<double>(3,1) << t_(0,0), t_(0,1), t_(0,2));
}
直接法:
直接法具体过程如下:
- 准备工作。假设相邻帧之间的位姿 Tk,k−1 已知,一般初始化为上一相邻时刻的位姿或者假设为单位矩阵。通过之前多帧之间的特征检测以及深度估计,我们已经知道第k-1帧中特征点位置以及它们的深度。
- 重投影。知道 Ik−1 中的某个特征在图像平面的位置 (u,v) ,以及它的深度 d ,能够将该特征投影到三维空间 pk−1 ,该三维空间的坐标系是定义在 Ik−1 摄像机坐标系的。所以,我们要将它投影到当前帧 Ik 中,需要位姿转换 Tk,k−1 ,得到该点在当前帧坐标系中的三维坐标 pk 。最后通过摄像机内参数,投影到 Ik 的图像平面 (u′,v′) ,完成重投影。
- 迭代优化更新位姿 。按理来说对于空间中同一个点,被极短时间内的相邻两帧拍到,它的亮度值应该没啥变化。但由于位姿是假设的一个值,所以重投影的点不准确,导致投影前后的亮度值是不相等的。不断优化位姿使得这个残差最小,就能得到优化后的位姿 Tk,k−1 。
将上述过程公式化如下:通过不断优化位姿 Tk,k−1 最小化残差损失函数。
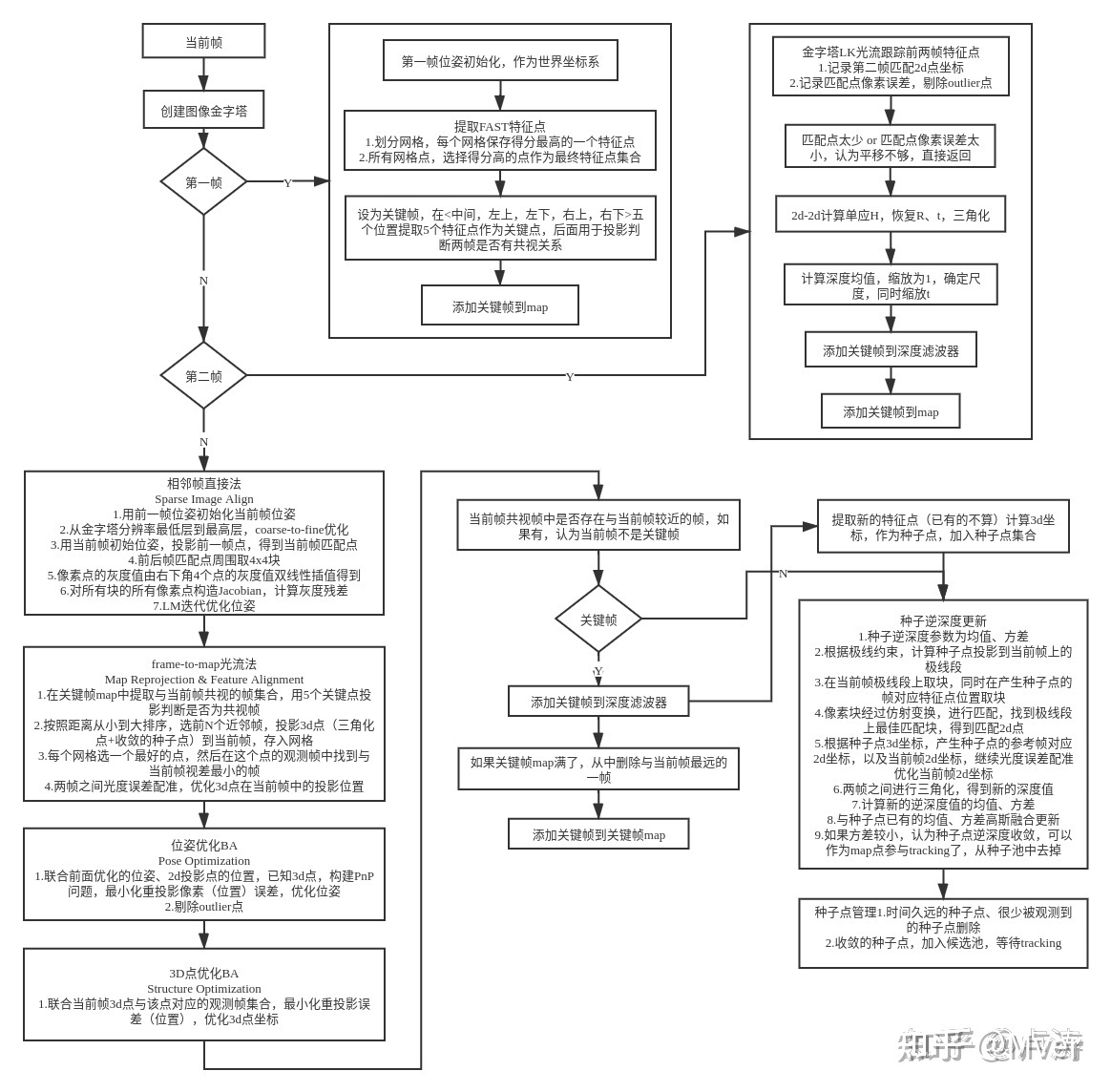
半直接法以SVO为例:
三角测量(三角化):
定义:通过在两处观测同一个点的夹角,从而确定该点的距离。
作用:通过三角测量来估计地图点的深度。
点的重投影误差:
根据多视图几何得到点的三维坐标在当前帧的投影(运动方程),与根据帧间估计得到上一帧的点在当前帧中该点的坐标(观测方程)。
投影点-匹配点=点的重投影误差
运动方程与观测方程的差为重投影误差

线的重投影误差:
三维直线两个端点投影到匹配到的特征线段所在直线的距离和

计算机视觉中的warp函数:
Warp这个操作本身可以理解为扭曲,变型,变换;其实就是一种数学运算,是一种统称,一般情况下paper里会定义怎么warp,不同建模warp function不同。
对于计算机几何视觉一般有
1)欧氏变换(SO3,SE3),自由度为3或者6,不变的是长度,夹角,体积;
2)相似变换,自由度为7,不变的是体积比;
3)仿射变换(Affine),自由度12,不变的是平行性,体积比;
4)射影变换,自由度15,相交性不变。
SLAM系统相关
位姿估计
特征点匹配的方法可以LK光流/暴力匹配/FLANN
特征点匹配->计算基础矩阵->计算本质矩阵->本质矩阵恢复位姿
恢复位姿代码如下
//-- 计算基础矩阵
Mat fundamental_matrix;
fundamental_matrix = findFundamentalMat(points1, points2, FM_RANSAC);
//cout << "fundamental_matrix is " << endl << fundamental_matrix << endl;
//-- 计算本质矩阵
Point2d principal_point(300, 300); //相机主点, TUM dataset标定值
int focal_length = 600; //相机焦距, TUM dataset标定值
Mat essential_matrix;
essential_matrix = findEssentialMat(points1, points2, focal_length, principal_point);
//cout << "essential_matrix is " << endl << essential_matrix << endl;
//-- 计算单应矩阵
Mat homography_matrix;
homography_matrix = findHomography(points1, points2, RANSAC, 3);
//cout << "homography_matrix is " << endl << homography_matrix << endl;
//-- 从本质矩阵中恢复旋转和平移信息.
recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point);
//cout << "R is " << endl << R << endl;
//cout << "t is " << endl << t << endl;
RANSAC在SLAM中主要是用于消除ORB特征点的误匹配
RANSAC算法基本思想:
- 从数据集中随机选出一组局内点(其数目要保证能够求解出模型的所有参数),计算出一套模型参数。
- 用得到的模型去测试其他所有的数据点,如果某点的误差在设定的误差阈值之内,就判定其为局内点,否则为局外点,只保留目前为止局内点数目最多的模型,将其记录为最佳模型。
- 重复执行1,2步足够的次数(即达到预设的迭代次数)后,使用最佳模型对应的局内点来最终求解模型参数。
- 最后可以通过估计局内点与模型的错误率来评估模型。
RANSAC中的内点和外点:
内点:符合模型的估计的点成为内点
外点:不符合模型估计的点成为外点
SLAM中旋转矩阵、旋转向量(轴角)、欧拉角、四元数的转换关系

旋转表示之间的对比
- SLAM中编程使用频繁,重点掌握
- 旋转矩阵R具有正交性,R和R的转置RT的乘积是单位阵,行列式为1
- 旋转矩阵R的逆矩阵表示一个和R相反的旋转
- 旋转矩阵R通常和平移向量一起组成齐次变换矩阵T,描述欧式坐标变换,引入齐次坐标是为了可以方便的描述连续的欧氏变换
- 冗余,9个元素表示三个自由度的旋转,比较冗余
-
SLAM中编程使用频繁程度接近旋转矩阵
-
四元数由一个实部三个虚部组成,是一种非常紧凑、没有奇异的表达方式(奇异矩阵不是满秩)
-
编程时候很多坑,必须注意。首先,一定要注意四元素定义中实部虚部和打印系数的顺序不同,很容易出错!
其次,单位四元素才能描述旋转,所以四元素使用前必须归一化:q.normalize()。
- 用一个旋转轴n和旋转角θ来描述一个旋转,所以也称轴角。不过很明显,因为旋转角度有一定的周期性(360°一圈),所以这种表达方式具有奇异性。
- 从旋转向量到旋转矩阵的转换过程称为 罗德里格斯公式。
- 旋转向量和旋转矩阵的转换关系,其实对应于李代数和李群的映射
- 把一次旋转分解成3次绕不同坐标轴的旋转,比如航空领域经常使用的“偏航-俯仰-滚转”(yaw,pitch,roll)就是一种欧拉角。该表达方式最大的优势就是直观。
- 欧拉角在SLAM中用的很少,原因是它的一个致命缺点:万向锁。也就是在俯仰角为±90°时,第一次和第3次旋转使用的是同一个坐标轴,会丢失一个自由度,引起奇异性。事实上,想要表达三维旋转,至少需要4个变量。
常用误差指标:
绝对轨迹误差(Absolute Trajectory Error,ATE),形式如下:

实际上是每个位姿李代数的均方根误差(RMSE)。这种误差可以刻画两条轨迹的旋转和平移误差。
绝对平移误差(Average Translations Error):

其中,Trans表示取括号内部变量的平移部分。
相对位姿误差(Relative Pose Error,RPE)定义如下:

同样可以只取平移部分:

超像素:
由一系列位置相邻且颜色、亮度、纹理等特征相似的像素点组成的小区域。
图像强度:
表示单通道图像像素的强度(值的大小)。
灰度图中,它是图像的灰度。
RGB颜色空间中,可以理解为它是R通道、G通道、B通道的像素灰度值,也就是RGB中的三个图像强度。
世界坐标系、物体坐标系和惯性坐标系之间的关系
世界坐标系->惯性坐标系:平移
惯性坐标系->物体坐标系:旋转

光流法:一种描述像素随着时间,在图像之间运动的方法。
稀疏光流:计算部分光流。
稠密光流:计算所有光流。
稀疏光流以LK光流法为代表的。
LK光流计算过程:
假设相机的图像是随时间变化的,图像看做是时间的函数:I(t),在t时刻,位于(x,y)的像素,灰度为I(x,y,t)。
灰度不变假设:同一个空间点的像素灰度值,在各个图像中是固定不变的。
对于 t 时刻位于(x,y)位置的像素,设t+dt时刻,运动到(x+dx,y+dy)处,由于灰度不变:

对左边进行泰勒展开,保留一阶项,得:

由于灰度不变,下一个时刻的灰度等于之前的灰度,从而

两边除以dt,得

其中,dx/dt为像素在x轴上运动速度,而dy/dt为y轴速度,记为u,v。同时∂I/∂x为图像在该点处x方向的梯度,另一项是y方向的梯度。记为Ix,Iy。
图像灰度对时间的变化量记为It,写成矩阵形式为:

计算像素运动u,v,但是该式是带有两个变量的一次方程,无法解出,因此,必须引入额外的约束来计算 u,v。在 LK 光流中,我们假设某一个窗口内的像素具有相同的运动。 考虑一个大小为 w ×w 大小的窗口,它含有w²数量的像素。由于该窗口内像素具有同样的运动,因此我们共有个w²方程

用最小二乘法求解:

简化为:

最小二乘法求解:
















 540
540











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









