






描述:创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm(可自定义),高 8cm(可自定义),四轮由两个驱动轮和两个万向支撑轮组成,两个驱动轮半径为 3.25cm(可自定义),轮胎宽度1.5cm(可自定义),两个万向轮为球状,半径 0.75cm(可自定义),底盘离地间距为 1.5cm(与万向轮直径一致-根据自己定义即可)
效果如下:

步骤实现
-
新建 urdf (demo_02.urdf)文件,并与 launch (demo_02.launch)文件集成
-
搭建底盘
-
在底盘上添加两个驱动轮
-
在底盘上添加两个万向轮
步骤一:新建功能包,导入依赖,创建相应的文件
1.mkdir -p urdf_rviz/src
2.cd urdf_rviz/src
3.catkin_create_pkg urdf_rviz urdf xacro
4.cd urdf_rviz/src/urdf_rviz
4.1 mkdir urdf //存储 urdf 文件的目录
4.2 mkdir meshes //机器人模型渲染文件
4.3 mkdir config //配置文件
4.4 mkdir launch //存储 launch 启动文件步骤二:创建urdf文件
1.cd urdf文件下
1.1 mkdir urdf
1.2 mkdir xacro
2.cd 1.1的urdf文件下:
touch demo_02.urdf //新建.urdf文件
2.1基本框架(在demo_02.urdf文件中编辑)
<robot name="mycar">
<!-- 设置 base_footprint -->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="0.001" />
</geometry>
</visual>
</link>
</robot>
2.2底盘搭建(在demo_02.urdf文件中编辑)
<!--
参数
形状:圆柱
半径:10 cm
高度:8 cm
离地:1.5 cm
-->
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.1" length="0.08" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow">
<color rgba="0.8 0.3 0.1 0.5" />
</material>
</visual>
</link>
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link"/>
<origin xyz="0 0 0.055" />
</joint>
2.3添加驱动轮(在demo_02.urdf文件中编辑)
<!-- 添加驱动轮 -->
<!--
驱动轮是侧翻的圆柱
参数
半径: 3.25 cm
宽度: 1.5 cm
颜色: 黑色
关节设置:
x = 0
y = 底盘的半径 + 轮胎宽度 / 2
z = 离地间距 + 底盘长度 / 2 - 轮胎半径 = 1.5 + 4 - 3.25 = 2.25(cm)
axis = 0 1 0
-->
<link name="left_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0 0 0" rpy="1.5705 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="left_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="left_wheel" />
<origin xyz="0 0.1 -0.0225" />
<axis xyz="0 1 0" />
</joint>
<link name="right_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0 0 0" rpy="1.5705 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="right_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="right_wheel" />
<origin xyz="0 -0.1 -0.0225" />
<axis xyz="0 1 0" />
</joint>
2.4添加万向轮(在demo_02.urdf文件中编辑)
<!-- 添加万向轮(支撑轮) -->
<!--
参数
形状: 球体
半径: 0.75 cm
颜色: 黑色
关节设置:
x = 自定义(底盘半径 - 万向轮半径) = 0.1 - 0.0075 = 0.0925(cm)
y = 0
z = 底盘长度 / 2 + 离地间距 / 2 = 0.08 / 2 + 0.015 / 2 = 0.0475
axis= 1 1 1
-->
<link name="front_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="front_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="front_wheel" />
<origin xyz="0.0925 0 -0.0475" />
<axis xyz="1 1 1" />
</joint>
<link name="back_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="back_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="back_wheel" />
<origin xyz="-0.0925 0 -0.0475" />
<axis xyz="1 1 1" />
</joint>
步骤三:创建launch文件(demo_02.launch)
在launch文件夹下创建demo_02.launch
1.touch demo_02.launch
2.编写touch demo_02.launch内容
<launch>
<!-- 将 urdf 文件内容设置进参数服务器 -->
<param name="robot_description" textfile="$(find urdf_rviz)/urdf/urdf/demo_02.urdf" />
<!-- 启动 rivz -->
<node pkg="rviz" type="rviz" name="rviz" />
<!--node pkg="rviz" type="rviz" name="rviz_test" args="-d $(find urdf_rviz)/config/my_car.rviz" /-->
<!-- 启动机器人状态和关节状态发布节点 -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" />
<!-- 启动图形化的控制关节运动节点 -->
<!--node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /-->
</launch>
步骤四:
4.1编译功能包
在urdf文件下:
catkin_make4.2运行
roslaunch urdf_rviz demo_02.urdf步骤五:rviz显示
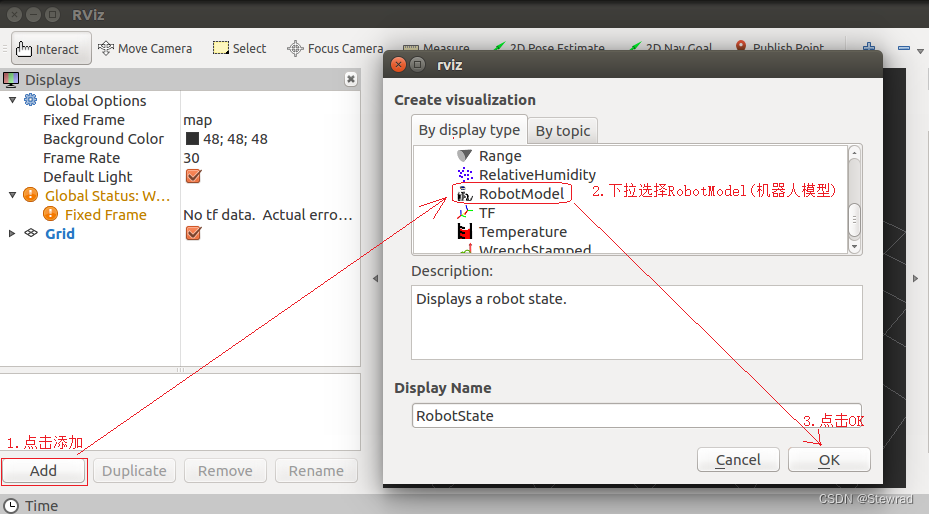
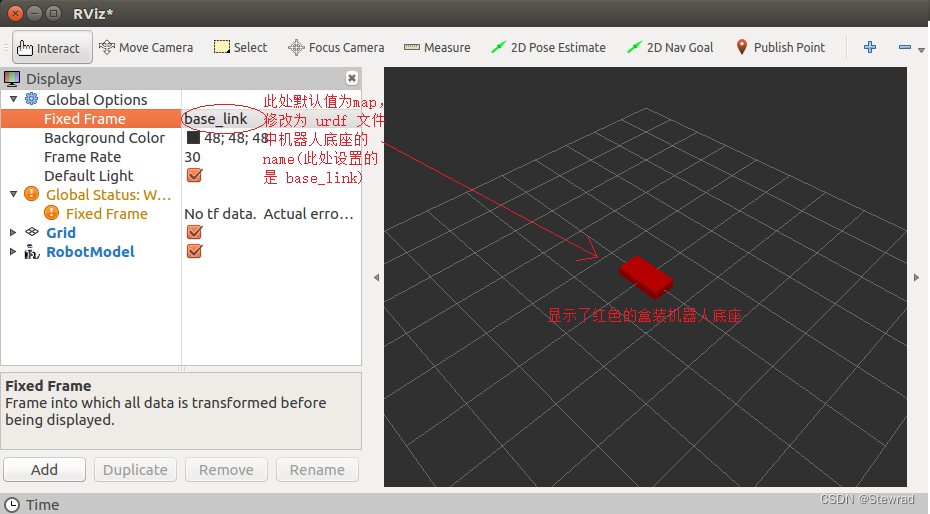
rviz 启动后,会发现并没有盒装的机器人模型,这是因为默认情况下没有添加机器人显示组件,需要手动添加,添加方式如下:
步骤刘:rviz显示优化
重复启动launch文件时,Rviz 之前的组件配置信息不会自动保存,需要重复执行步骤五的操作,为了方便使用,可以使用如下方式优化:

保存至config文件下,命名:my_car.rviz。在demo_2.launch文件中添加:
<node pkg="rviz" type="rviz" name="rviz_test" args="-d $(find urdf_rviz)/config/my_car.rviz" />再启动时,就可以包含之前的组件配置了,使用更方便快捷。














 371
371











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









