






为了联合建模道路网络中各种全局特征的空间、时间和语义关联,本文提出了一种用于交通流预测的深度学习框架T-MGCN(时态多图卷积网络)。首先,我们识别了几种语义关联,并将道路之间的非欧几里德空间关联和异构语义关联编码为多个图。后用多图卷积网络对这些相关性进行建模。其次,使用递归神经网络学习交通流的动态模式,以捕获时间相关性。第三,利用全连通神经网络融合时空相关性和全局特征。
(i) 空间相关性。交通流由底层道路网络的拓扑结构决定。一条道路的交通流将极大地影响其相邻道路的交通流。(ii)时间相关性。交通状况随时间动态变化。时间相关性可以通过接近性和周期性来反映。接近意味着最近时隙的交通状况比遥远时隙的交通状况更相关。周期性是指交通状况在一定时间间隔内呈现周期性变化模式。(iii)语义关联/语义相关性。由于一些潜在的语义关联,遥远的道路之间也可能有一定的关联。
目前基于GCN建模方法只考虑道路之间的拓扑关系来构建图形,而忽略了所有其他可以衡量道路之间相关性的语义因素。在本文中,我们提出了T-MGCN(时态多图卷积网络),这是一个统一的深度学习框架,它将空间、时间和语义相关性与各种全局特征相结合。
本文贡献(i)定义了道路之间两种语义关联(历史交通模式相关性和局部功能相似性),并使用多个图对异构的空间和语义关联进行编码(ii)我们识别了各种全局特征(即时间特征、周期性特征和事件特征),并设计了一个深度神经网络来联合建模空间、语义、时间相关性和多层次的全局特征。具体来说,我们堆叠了基于多图卷积网络的卷积层、基于GRU(门控递归单元)的递归层和基于全连接神经网络的输出层。
实际上,不仅是道路网络的拓扑结构,还可以从各个方面(例如历史行为、局部功能和道路类型)利用城市道路之间更多的语义关联。有效地捕捉这些语义关联可以进一步提高预测性能。
本文从三个方面构建道路图,即道路网络拓扑结构(由Gr和Gw表示)、交通模式相关性(由Gp表示)和局部功能相似性(由Gf表示)。在时间t的交通状况信号表示为N维向量![]() ,N是道路(节点)的数目。这样,一个交通状况样本可表示为
,N是道路(节点)的数目。这样,一个交通状况样本可表示为![]() ,其中输入部分
,其中输入部分![]()
![]() 是一列W个历史交通状况信号,输出部分
是一列W个历史交通状况信号,输出部分![]() 是t+h时刻的交通状况信号。
是t+h时刻的交通状况信号。
交通流预测问题可被视为从大量交通状况样本中学习,以获得一个函数f,该函数将当前时间t的W个历史交通状况信号映射到时间t+h的未来交通状况信号,如下式![]()
 、
、
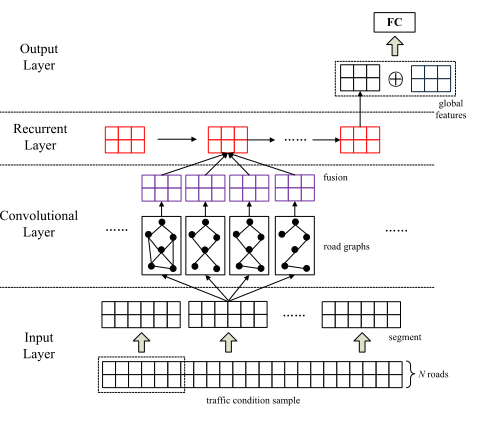
T-MGCN的体系结构包含四个层,输入层、卷积层、循环层和输出层。给定一个交通状况样本St,输入层使用一个滑动窗口来处理Int,以获得一系列片段。对于每个片段,卷积层使用四个单独的GCN(考虑到四个道路图)执行卷积运算,并融合结果以获得特征矩阵。递归层应用GRU处理从片段序列中获得的特征矩阵序列。最后,输出层将特征矩阵与全局特征进行融合,并通过全连接的神经网络得到预测结果。
输入层:
输入部分Int可以被视为一个N×W矩阵,N是道路数量,W是历史交通状况信号的数量。使用一个大小维w的滑动窗口,步大小为d来处理Int,然后,我们将获得一个K个片段的序列![]() ,其中每个都是N×w矩阵。每个片段应包含多个交通状况信号,即w>1,这是因为时间序列数据具有接近性/紧密性特征,即相邻时隙中的数据具有很强的局部交互作用,相邻时隙中的这些局部交互由卷积层分别为每个段捕获。因此,如果w=1,局部相互作用将被忽略。交通状况样本的输入部分应分成多个部分,即w<W,以便于循环层捕捉时间动态。如果w=W,时间动力学将被忽略。
,其中每个都是N×w矩阵。每个片段应包含多个交通状况信号,即w>1,这是因为时间序列数据具有接近性/紧密性特征,即相邻时隙中的数据具有很强的局部交互作用,相邻时隙中的这些局部交互由卷积层分别为每个段捕获。因此,如果w=1,局部相互作用将被忽略。交通状况样本的输入部分应分成多个部分,即w<W,以便于循环层捕捉时间动态。如果w=W,时间动力学将被忽略。
卷积层:
卷积运算能够很好地捕捉局部相关性,并保持平移不变性,是捕捉空间相关性的有效方法。图形构造是GCNs的关键步骤。
拓扑图![]() :边eij的权重wr(i,j)是从道路vi到道路vj至少需要跳数的倒数。
:边eij的权重wr(i,j)是从道路vi到道路vj至少需要跳数的倒数。
带权拓扑图![]() :拓扑图Gr只考虑从道路vi到vj的中间连接的数量。但每个连接的长度也可能影响vi和vj的相关性。边eij的权重ww(i,j)按下式计算
:拓扑图Gr只考虑从道路vi到vj的中间连接的数量。但每个连接的长度也可能影响vi和vj的相关性。边eij的权重ww(i,j)按下式计算![]() len(vk)计算路径vk(或道路vk)的长度,median代表中位数
len(vk)计算路径vk(或道路vk)的长度,median代表中位数
交通模式图![]() : 一条道路的交通模式,实际上就是这条道路(这个节点)在一段时间内交通状况的变化。有类似交通模式的道路不一定距离较近。利用每条道路的历史交通状况数据,我们通过直接测量每条道路对的历史交通状况模式的相似性来利用道路间的相关性。边eij的权重wp(i,j)是道路vi的历史条件模式与道路vj的历史条件模式之间的相似性。计算方式:给定一条道路vi,我们使用平均历史每周交通状况svi作为其交通模式,其中svi是一个序列,svi[j]是vi历史交通状况数据在一周的第j个时间段的平均交通状况。给定两条道路vi和vj,使用DTW(动态时间扭曲)来计算svi和svj之间的距离,表示为dwt(i,j),然后我们将距离度量转换为基于等式5的相似性度量,该度量被视为权重wp(i,j)。
: 一条道路的交通模式,实际上就是这条道路(这个节点)在一段时间内交通状况的变化。有类似交通模式的道路不一定距离较近。利用每条道路的历史交通状况数据,我们通过直接测量每条道路对的历史交通状况模式的相似性来利用道路间的相关性。边eij的权重wp(i,j)是道路vi的历史条件模式与道路vj的历史条件模式之间的相似性。计算方式:给定一条道路vi,我们使用平均历史每周交通状况svi作为其交通模式,其中svi是一个序列,svi[j]是vi历史交通状况数据在一周的第j个时间段的平均交通状况。给定两条道路vi和vj,使用DTW(动态时间扭曲)来计算svi和svj之间的距离,表示为dwt(i,j),然后我们将距离度量转换为基于等式5的相似性度量,该度量被视为权重wp(i,j)。![]() 其中,α用于控制距离的衰减率,该衰减率应根据相关交通状况的范围设定
其中,α用于控制距离的衰减率,该衰减率应根据相关交通状况的范围设定
功能图![]() :共享类似功能的城市地区的道路交通通常具有类似的交通模式。边eij的权重wf(i,j)是道路vi和道路v j局部区域功能的相似性。之前的研究已经证明,POI(兴趣点)分布可以衡量城市区域的功能,给定一条道路vi,从vi周围的POI计算以下八个类别的POI密度,即住宅、工作(如公司、办公楼等)、商业(如商场、商店等)、餐厅、学校、交通(如火车站、地铁站等)、娱乐(如剧院、酒吧等)和风景(如公园、湖泊等),形成特征向量pvi。pvi[j]表示道路vi周围j类POI的密度,通过
:共享类似功能的城市地区的道路交通通常具有类似的交通模式。边eij的权重wf(i,j)是道路vi和道路v j局部区域功能的相似性。之前的研究已经证明,POI(兴趣点)分布可以衡量城市区域的功能,给定一条道路vi,从vi周围的POI计算以下八个类别的POI密度,即住宅、工作(如公司、办公楼等)、商业(如商场、商店等)、餐厅、学校、交通(如火车站、地铁站等)、娱乐(如剧院、酒吧等)和风景(如公园、湖泊等),形成特征向量pvi。pvi[j]表示道路vi周围j类POI的密度,通过![]() 计算,mij是道路vi周围j类的POI数,mi是vi周围的POI总数,Mj是POI数据集中j类的POI数,M是POI数据集中的POI总数。该方程是根据自然语言处理领域中的TF-IDF设计的,它为数量较少的POI类别赋予了更高的权重。然后,给定两条道路vi和vj,余弦相似度来度量pvi和pvj之间的相似度。将其视为权重wf(i,j)。
计算,mij是道路vi周围j类的POI数,mi是vi周围的POI总数,Mj是POI数据集中j类的POI数,M是POI数据集中的POI总数。该方程是根据自然语言处理领域中的TF-IDF设计的,它为数量较少的POI类别赋予了更高的权重。然后,给定两条道路vi和vj,余弦相似度来度量pvi和pvj之间的相似度。将其视为权重wf(i,j)。
多图卷积网络:每个道路图都被输入到一个单独的GCN中。传播规则如下![]() 每个片段被输入四个GCN,得到四个特征矩阵Hr, Hw, Hp, 和Hf,使用基于参数矩阵的融合方法,将其合并成一个特征矩阵Y,如下式
每个片段被输入四个GCN,得到四个特征矩阵Hr, Hw, Hp, 和Hf,使用基于参数矩阵的融合方法,将其合并成一个特征矩阵Y,如下式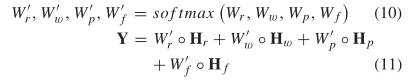 Wr、Ww、Wp、n和Wf是可学习参数矩阵,softmax操作用于规范化参数矩阵
Wr、Ww、Wp、n和Wf是可学习参数矩阵,softmax操作用于规范化参数矩阵
循环层:用于捕获由特征矩阵序列表示的片段序列中的时间相关性。本文使用GRU,以前单元的输出是当前单元输入的一部分。这种机制允许逐步传递信息,因此RNN能够捕获时间相关性。GRU被提出用于解决梯度消失或爆炸的问题,以便更好地学习长期的时间相关性。
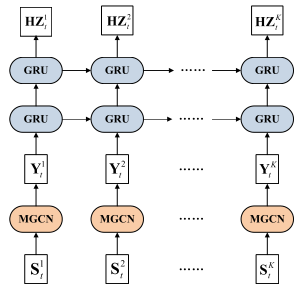 我们选择了两层堆叠的GRU结构。这是增加模型容量的有效方法、在GRU层之间应用dropout进行正则化。一个交通状况样本St被分成K个段(即S1t、S2t、...SKt),将上文卷积层应用于每个段。产生一系列特征矩阵Y1t、Y2t、...YKt。这些特征矩阵按时间顺序输入到递归层。将最后一个隐藏状态
我们选择了两层堆叠的GRU结构。这是增加模型容量的有效方法、在GRU层之间应用dropout进行正则化。一个交通状况样本St被分成K个段(即S1t、S2t、...SKt),将上文卷积层应用于每个段。产生一系列特征矩阵Y1t、Y2t、...YKt。这些特征矩阵按时间顺序输入到递归层。将最后一个隐藏状态![]() 作为循环层的输出,表示为
作为循环层的输出,表示为![]()
输出层:循环层RZt的输出对道路网络拓扑结构的空间相关性、道路间语义相关性和紧密度的时间相关性进行编码。但是,还有其他一些全局特性可能会影响交通状况(例如,时间和事件)。故我们要提取以下全局特征 ,1) 时间特征:给定一个交通状况样本St,我们将一天中的时间、一周中的某一天和假日事件(即假日或正常日)视为时间特征。我们在未来时间t+h提取时间特征,并对交通状况进行预测。将St道路网的时间特征矩阵表示为![]() 。2) 周期性特征:循环层只能捕捉短期周期性,因为W(即交通状况样本的输入部分的长度)不能太长。这是因为过长的RNN很难训练,过长序列的梯度消失也会削弱周期性的影响。给定交通状况样本St,我们考虑最后一天同一时间
。2) 周期性特征:循环层只能捕捉短期周期性,因为W(即交通状况样本的输入部分的长度)不能太长。这是因为过长的RNN很难训练,过长序列的梯度消失也会削弱周期性的影响。给定交通状况样本St,我们考虑最后一天同一时间![]() 的交通状况以及最后一周同一时间
的交通状况以及最后一周同一时间![]() 的交通状况作为长期周期特征,其中nd和nw分别为一天和一周的持续时间。同时,不是考虑
的交通状况作为长期周期特征,其中nd和nw分别为一天和一周的持续时间。同时,不是考虑![]() 和
和![]() 的单一交通信号,而是以其为中心考虑一个小窗口中的交通信号。原因是交通状况通常不是严格的周期性。们将St道路网的周期性特征矩阵表示为
的单一交通信号,而是以其为中心考虑一个小窗口中的交通信号。原因是交通状况通常不是严格的周期性。们将St道路网的周期性特征矩阵表示为![]() ,是一个
,是一个![]() 矩阵,wp是小窗口中交通状况信号的数量。3) 事件特征:利用一些事件发布网站中共享的位置和时间属性的文本信息来识别事件,并基于深度神经网络捕捉它们对未来交通模式的影响。给定一个交通状况样本St,将每个道路vi附近的输入部分Int期间发布的文本片段聚合起来,形成一个文档
矩阵,wp是小窗口中交通状况信号的数量。3) 事件特征:利用一些事件发布网站中共享的位置和时间属性的文本信息来识别事件,并基于深度神经网络捕捉它们对未来交通模式的影响。给定一个交通状况样本St,将每个道路vi附近的输入部分Int期间发布的文本片段聚合起来,形成一个文档![]() ,使用TextCNN通过预先训练的单词嵌入层、卷积层、最大时间池层和完全连接层从D(t,i)中提取特征向量。结合所有提取的特征向量,形成St道路网络的事件特征矩阵,称为
,使用TextCNN通过预先训练的单词嵌入层、卷积层、最大时间池层和完全连接层从D(t,i)中提取特征向量。结合所有提取的特征向量,形成St道路网络的事件特征矩阵,称为![]() 。
。
融合了RZt,TZt,PZt,和EZt。首先将RZt、TZt、PZt、和EZt连接成一个长特征矩阵![]() ,然后堆叠两个全连接的层。其中第一层可视为嵌入层,第二层用于确保输出矩阵
,然后堆叠两个全连接的层。其中第一层可视为嵌入层,第二层用于确保输出矩阵![]() 与
与![]() 有相同的形状,最后,我们使用sigmoid作为激活函数,作用〜Zt上输出t+h时的预测交通状况信号,表示为
有相同的形状,最后,我们使用sigmoid作为激活函数,作用〜Zt上输出t+h时的预测交通状况信号,表示为![]() 。使用RMSE(均方根误差)作为损失函数。
。使用RMSE(均方根误差)作为损失函数。















 1496
1496











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









