







文章目录
总览
在这次编程任务中,我们会进一步模拟现代图形技术。我们在代码中添加了Object Loader(用于加载三维模型), Vertex Shader 与 Fragment Shader,并且支持了纹理映射。
而在本次实验中,你需要完成的任务是:
- 修改函数
rasterize_triangle(const Triangle& t)in rasterizer.cpp: 在此处实现与作业 2 类似的插值算法,实现法向量、颜色、纹理颜色的插值。 - 修改函数
get_projection_matrix()in main.cpp: 将你自己在之前的实验中实现的投影矩阵填到此处,此时你可以运行 ./Rasterizer output.png normal来观察法向量实现结果。 - 修改函数
phong_fragment_shader()in main.cpp: 实现 Blinn-Phong 模型计算 Fragment Color. - 修改函数
texture_fragment_shader()in main.cpp: 在实现 Blinn-Phong的基础上,将纹理颜色视为公式中的 kd,实现 TextureShading Fragment Shader. - 修改函数
bump_fragment_shader()in main.cpp: 在实现 Blinn-Phong 的基础上,仔细阅读该函数中的注释,实现 Bump mapping. - 修改函数
displacement_fragment_shader()in main.cpp: 在实现 Bump mapping 的基础上,实现 displacement mapping
这将会生成命名为 Rasterizer 的可执行文件。使用该可执行文件时,你传入的第二个参数将会是生成的图片文件名,而第三个参数可以是如下内容:
使用
texture: 使用代码中的 texture shader.
使用举例: ./Rasterizer output.png texture
normal: 使用代码中的 normal shader.
使用举例: ./Rasterizer output.png normal
phong: 使用代码中的 blinn-phong shader.
使用举例: ./Rasterizer output.png phong
bump: 使用代码中的 bump shader.
使用举例: ./Rasterizer output.png bump
displacement: 使用代码中的 displacement shader.
使用举例: ./Rasterizer output.png displacement
当你修改代码之后,你需要重新 make 才能看到新的结果。
框架代码说明
相比上次实验,我们对框架进行了如下修改:
- 我们引入了一个第三方.obj 文件加载库来读取更加复杂的模型文件,这部分库文件在OBJ_Loader.h file. 你无需详细理解它的工作原理,只需知道这个库将会传递给我们一个被命名被 TriangleList 的 Vector,其中每个三角形都有对应的点法向量与纹理坐标。此外,与模型相关的纹理也将被一同加载。
注意:如果你想尝试加载其他模型,你目前只能手动修改模型路径。 - 我们引入了一个新的 Texture 类以从图片生成纹理,并且提供了查找纹理颜色的接口:Vector3f getColor(float u, float v)
- 我们创建了 Shader.hpp 头文件并定义
fragment_shader_payload,其中包括了 Fragment Shader 可能用到的参数。目前main.cpp中有三个 Fragment Shader,其中 fragment_shader 是按照法向量上色的样例 Shader,其余两个将由你来实现。 - 主渲染流水线开始于
rasterizer::draw(std::vector<Triangle> &TriangleList).我们再次进行一系列变换,这些变换一般由 Vertex Shader 完成。在此之后,我们调用函数 rasterize_triangle. - rasterize_triangle 函数与你在作业 2 中实现的内容相似。不同之处在于被设定的数值将不再是常数,而是按照
Barycentric Coordinates对法向量、颜色、纹理颜色与底纹颜色 (Shading Colors) 进行插值。回忆我们上次为了计算z value而提供的[alpha, beta, gamma],这次你将需要将其应用在其他参数的插值上。你需要做的是计算插值后的颜色,并将 Fragment Shader 计算得到的颜色写入 framebuffer,这要求你首先使用插值得到的结果设置fragment shader payload,并调用 fragment shader 得到计算结果。
运行与结果
在你按照上述说明将上次作业的代码复制到对应位置,并作出相应修改之后(请务必认真阅读说明),你就可以运行默认的 normal shader 并观察到如下结果:

实现 Blinn-Phong 反射模型之后的结果应该是:

实现纹理之后的结果应该是:

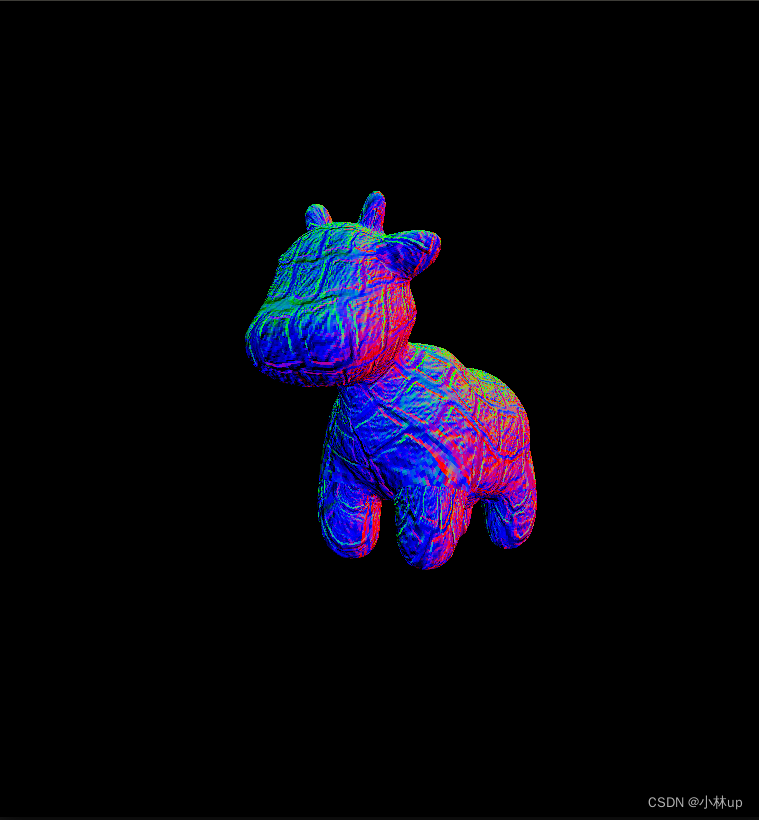
实现 Bump Mapping 后,你将看到可视化的凹凸向量:

实现 Displacement Mapping 后,你将看到如下结果:

代码实现
我们先看一下rasterizer::draw的实现:
void rst::rasterizer::draw(std::vector<Triangle *> &TriangleList) {
float f1 = (50 - 0.1) / 2.0;
float f2 = (50 + 0.1) / 2.0;
Eigen::Matrix4f mvp = projection * view * model;
for (const auto& t:TriangleList)
{
Triangle newtri = *t;
std::array<Eigen::Vector4f, 3> mm {
(view * model * t->v[0]),
(view * model * t->v[1]),
(view * model * t->v[2])
};//得到相机下的四维坐标
std::array<Eigen::Vector3f, 3> viewspace_pos;
std::transform(mm.begin(), mm.end(), viewspace_pos.begin(), [](auto& v) {
return v.template head<3>();
});//得到相机下的三维坐标
Eigen::Vector4f v[] = {
mvp * t->v[0],
mvp * t->v[1],
mvp * t->v[2]
};//计算屏幕坐标
//Homogeneous division
for (auto& vec : v) {
vec.x()/=vec.w();
vec.y()/=vec.w();
vec.z()/=vec.w();
}//进行了齐次除法,也就是透视除法,视锥体被变换到一个立方体
Eigen::Matrix4f inv_trans = (view * model).inverse().transpose();
Eigen::Vector4f n[] = {
inv_trans * to_vec4(t->normal[0], 0.0f),
inv_trans * to_vec4(t->normal[1], 0.0f),
inv_trans * to_vec4(t->normal[2], 0.0f)
};//计算变换以后得新法线的方向
//Viewport transformation
for (auto & vert : v)
{
vert.x() = 0.5*width*(vert.x()+1.0);
vert.y() = 0.5*height*(vert.y()+1.0);
vert.z() = -vert.z() * f1 + f2;//这里要添加一个负号
}
for (int i = 0; i < 3; ++i)
{
//screen space coordinates
newtri.setVertex(i, v[i]);
}
for (int i = 0; i < 3; ++i)
{
//view space normal
newtri.setNormal(i, n[i].head<3>());
}
newtri.setColor(0, 148,121.0,92.0);
newtri.setColor(1, 148,121.0,92.0);
newtri.setColor(2, 148,121.0,92.0);
// Also pass view space vertice position
rasterize_triangle(newtri, viewspace_pos);
}
}
① 经过MV变换我们得到view space的点,存在mm里,而后传递给viewspace_pos,后面传递给了rasterize_triangle函数作为着色点的位置用于计算光源到着色点的单位向量。
② 经过MVP变换我们得到投影空间的点,这时候已经投影到了平面,不过这时候投影的原点在矩形的中心,保存在了v,然后对这个齐次坐标进行了齐次除法(x,y,z分量除以第四个分量)w坐标记录了原本的z值,但是后面似乎没有用到。
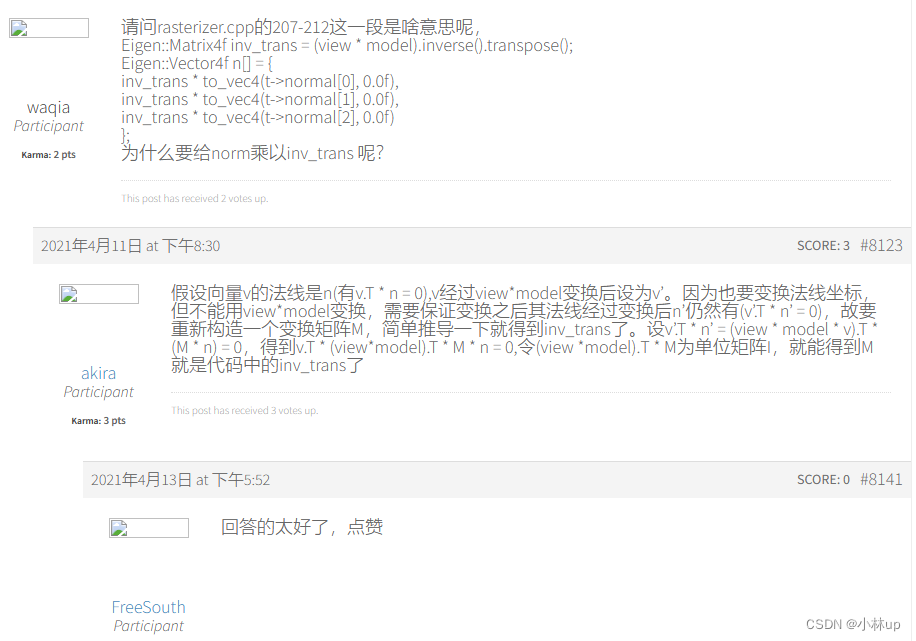
③ MV变换后的点法向量和原来的法向量不同,中间差了一个矩阵:
(
M
V
)
−
T
(MV)^{-T}
(MV)−T,这个推导在这篇文章里有写:计算机图形学五:局部光照模型(Blinn-Phong 反射模型)与着色方法(Phong Shading)
④ 为了变换到当前的屏幕的空间(原点在左下角,x轴向右,y轴向上),再次对MVP变换后的点做了一次变换:
for (auto & vert : v)
{
vert.x() = 0.5*width*(vert.x()+1.0);
vert.y() = 0.5*height*(vert.y()+1.0);
vert.z() = -vert.z() * f1 + f2;//这里要添加一个负号
}
下面是从论坛截的一些同学的评论,觉得也挺好。作业3 interpolated_shadingcoords
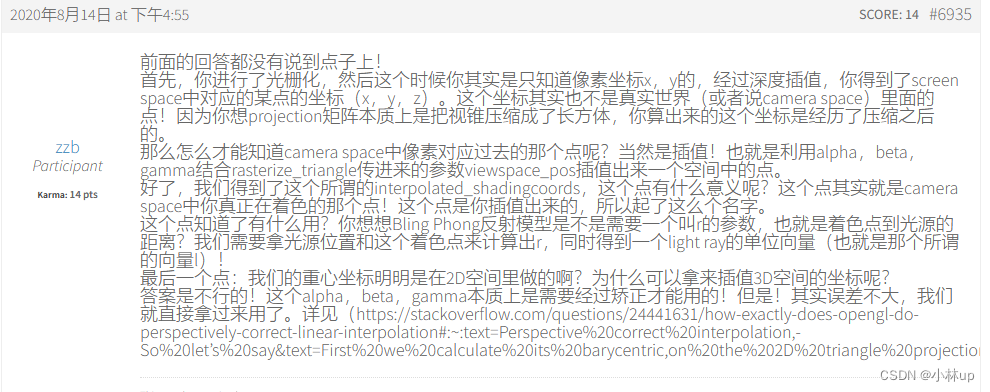
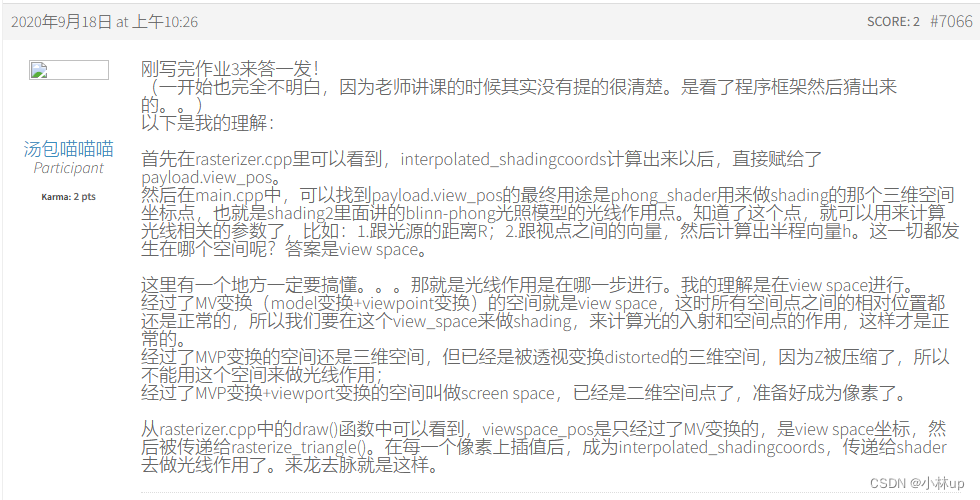
总结:在rasterizer::draw()函数里,使用newtri记录三角形的指针,并重新定义了三角形的属性:①法线:在相机空间viewspace(只进行MV变换)通过setNormal()函数实现;②顶点位置:在screen space(屏幕空间),通过setVertex()函数实现,③viewspace下的三角形顶点的坐标通过参数的形式传递给了rasterize_triangle()函数,用作viewspace下使用重心插值公式渲染像素点的坐标interpolated_shadingcoords(详情看rasterize_triangle()函数)
rasterize_triangle(const Triangle& t)的实现
void rst::rasterizer::rasterize_triangle(const Triangle& t, const std::array<Eigen::Vector3f, 3>& view_pos)
{
// TODO: From your HW3, get the triangle rasterization code.
// TODO: Inside your rasterization loop:
// * v[i].w() is the vertex view space depth value z. //顶点的深度值
// * Z is interpolated view space depth for the current pixel //当前像素的坐标值的深度
// * zp is depth between zNear and zFar, used for z-buffer//zp计算的像素在zNear和zFar之间的深度,使用在z-buffer算法里
// float Z = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());//alpha beta gamma通过插值函数求出
// float zp = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
// zp *= Z;
//view_pos: 这里使用的是相机下看到的坐标
// TODO: Interpolate the attributes:
// auto interpolated_color
// auto interpolated_normal
// auto interpolated_texcoords
// auto interpolated_shadingcoords
// Use: fragment_shader_payload payload( interpolated_color, interpolated_normal.normalized(), interpolated_texcoords, texture ? &*texture : nullptr);
// Use: payload.view_pos = interpolated_shadingcoords;
// Use: Instead of passing the triangle's color directly to the frame buffer, pass the color to the shaders first to get the final color;
// Use: auto pixel_color = fragment_shader(payload);
auto v = t.toVector4();
// TODO : Find out the bounding box of current triangle.
int bounding_box_left_x = std::min(v[0].x(), std::min(v[1].x(), v[2].x()));
int bounding_box_right_x = std::max(v[0].x(), std::max(v[1].x(), v[2].x()));
int bounding_box_bottom_y = std::min(v[0].y(), std::min(v[1].y(), v[2].y()));
int bounding_box_top_y = std::max(v[0].y(), std::max(v[1].y(), v[2].y()));
for (int x = bounding_box_left_x; x <= bounding_box_right_x; x++) {
for (int y = bounding_box_bottom_y; y <= bounding_box_top_y; y++) {
if (insideTriangle(x + 0.5, y + 0.5, t.v)) {
// If so, use the following code to get the interpolated z value.
auto[alpha, beta, gamma] = computeBarycentric2D(x + 0.5, y + 0.5, t.v);
float Z = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
// 计算正确的深度值
float zp = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
zp *= Z; //zp是正确的深度值
if (zp < depth_buf[get_index(x, y)]) {
depth_buf[get_index(x, y)] = zp;
//auto interpolated_color
auto interpolated_color = interpolate(alpha, beta, gamma, t.color[0], t.color[1], t.color[2], 1.0);
auto interpolated_normal = interpolate(alpha, beta, gamma, t.normal[0], t.normal[1], t.normal[2], 1.0);
auto interpolated_texcoords = interpolate(alpha, beta, gamma, t.tex_coords[0], t.tex_coords[1], t.tex_coords[2], 1.0);
auto interpolated_shadingcoords = interpolate(alpha, beta, gamma, view_pos[0], view_pos[1], view_pos[2], 1.0);
fragment_shader_payload payload( interpolated_color, interpolated_normal.normalized(), interpolated_texcoords, texture ? &*texture : nullptr);
payload.view_pos = interpolated_shadingcoords;
auto pixel_color = fragment_shader(payload);
set_pixel(Eigen::Vector2i(x, y), pixel_color);
}
}
}
}
}
这里使用toVector4函数将t的w值全部变为了1,这里本来需要存储深度值的,但是这几行代码还是把z的值求出来了(范围在0.1到50):
auto[alpha, beta, gamma] = computeBarycentric2D(x + 0.5, y + 0.5, t.v);
float Z =1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
// 计算正确的深度值
float zp = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
zp *= Z; //zp是正确的深度值
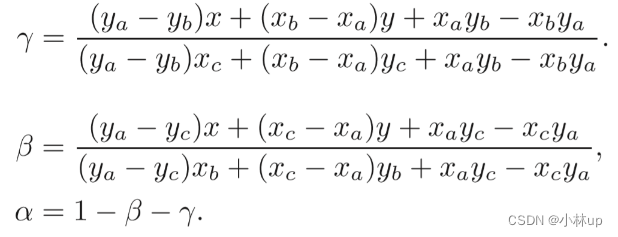
首先这里使用了computeBarycentric2D进行插值,这里使用了二维点来插值得到了在view平面上的alpha,beta和gamma,这里使用了平面的重心坐标公式,这里直接给出可以和上面的代码比较(具体可以到computeBarycentric2D这个函数下面查看):
具体可以查看这几篇文章:
计算机图形学三(补充):重心坐标(barycentric coordinates)详解及其作用
Perspective Correct Interpolation
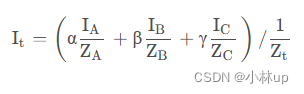
但是这肯定是有误差的,我们希望的还是在真实的三维空间找到它的深度,这时候就需要用到透视校正插值了,这里给出透视校正插值的公式,具体可以看这篇文章的推导了解透视校正插值:【重心坐标插值、透视矫正插值】原理以及用法见解(GAMES101深度测试部分讨论)
Z t = 1 α Z A + β Z B + γ Z C = 1 Z_t=\frac{1}{\frac{\alpha}{Z_A}+\frac{\beta}{Z_B}+\frac{\gamma}{Z_C}}=1 Zt=ZAα+ZBβ+ZCγ1=1
由于使用的三角形在toVector4函数的作用下三个顶点的深度都变为1,所以这里等价于:
Z t = 1 α + β + γ = 1 Z_t=\frac{1}{\alpha+\beta+\gamma}=1 Zt=α+β+γ1=1
然后计算真实的深度(后面两行的代码)
z
p
=
(
α
z
0
1
+
β
z
1
1
+
γ
z
2
1
)
=
α
z
0
+
β
z
1
+
γ
z
2
zp = (\alpha \frac{z_0}{1}+\beta \frac{z_1}{1} + \gamma\frac{z_2}{1})=\alpha z_0 + \beta z_1 + \gamma z_2
zp=(α1z0+β1z1+γ1z2)=αz0+βz1+γz2
依然计算出了0.1到50 的深度(但我觉得这个深度不是真正的深度,真正的深度应该和摄像机的位置有关?不过下面的计算不影响,我们只是用这个“深度”判断是否更靠近相机)。
关于透视校正插值可以看这篇文章:
计算机图形学六:正确使用重心坐标插值(透视矫正插值(Perspective-Correct Interpolation))和图形渲染管线总结
注意这一句:
set_pixel(Eigen::Vector2i(x, y), pixel_color);
和之前的渲染三角形不一样,参数列表的第一个参数是Eigen::Vector2i类型的,我复制作业2的代码提示数组的维度不一样报错了,原来的是Eigen::Vector3f的类型。
另外和作业2一样,insideTriangle函数的参数列表里的x和y我们还是使用了float类型,因为我们在rasterize_triangle(const Triangle& t)中使用了x+0.5和y+0.5作为这个函数的第一和第二个参数(像素的中心)。
static bool insideTriangle(float x, float y, const Vector4f* _v){// 这里还是一样进行了参数列表的修改
Vector3f v[3];
for(int i=0;i<3;i++)
v[i] = {_v[i].x(),_v[i].y(), 1.0};
Vector3f f0,f1,f2;
f0 = v[1].cross(v[0]);
f1 = v[2].cross(v[1]);
f2 = v[0].cross(v[2]);
Vector3f p(x,y,1.);
if((p.dot(f0)*f0.dot(v[2])>0) && (p.dot(f1)*f1.dot(v[0])>0) && (p.dot(f2)*f2.dot(v[1])>0))
return true;
return false;
}
get_projection_matrix()的实现
首先在main.cpp插入我们之前写的投影矩阵的代码,直接复制以前的就好:
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio, float zNear, float zFar)
{
// TODO: Use the same projection matrix from the previous assignments
Eigen::Matrix4f projection = Eigen::Matrix4f::Identity();
float t = abs(zNear) * tan(eye_fov * MY_PI / (180 * 2));
float r = aspect_ratio * t;
float l = -r;
float b = -t;
float n = -zNear;
float f = -zFar;
projection(0, 0) = 2 * n / (r - l);
projection(0, 2) = (l + r) / (l - r);
projection(1, 1) = 2 * n / (t - b);
projection(1, 2) = (b + t) / (b - t);
projection(2, 2) = (f + n) / (n - f);
projection(2, 3) = 2 * f * n / (f - n);
projection(3, 2) = 1.0;
projection(3, 3) = 0.0;
return projection;
}
为了不让我们的图形覆盖的顺序颠倒,我们需要修改rasterizer.cpp中的void rst::rasterizer::draw(std::vector<Triangle *> &TriangleList)
找到这一行:
vert.z() = vert.z() * f1 + f2;
右边的vert.z()前面添加一个负号
vert.z() = -vert.z() * f1 + f2;
否则可能会出现和之前一样的牛牛的屁屁对着我们的情况(三角形的覆盖是顺序有问题,这里是左右手系对应的问题,因为我的投影矩阵使用的还是右手系也就是闫老师说的那个矩阵,但是框架代码使用的是左手系,需要颠倒一下)。
我们编译,在命令行输入命令
./Rasterizer output.png normal
可以得到:

我们看下纹理映射实现的源码:
Eigen::Vector3f normal_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f return_color = (payload.normal.head<3>().normalized() + Eigen::Vector3f(1.0f, 1.0f, 1.0f)) / 2.f;
Eigen::Vector3f result;
result << return_color.x() * 255, return_color.y() * 255, return_color.z() * 255;
return result;
}
因为发现的方向的三个分量的范围是[-1,1],我们加上1就变为[0,2],再除以2就归一化为[0,1],也就变成了RGB三个颜色分量的范围。
phong_fragment_shader()的实现
使用Phong Shading,详细可以参考计算机图形学五:局部光照模型(Blinn-Phong 反射模型)与着色方法(Phong Shading),公式如下:

这里根据公式写代码即可:
Eigen::Vector3f phong_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
Eigen::Vector3f result_color = {0, 0, 0};
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
Eigen::Vector3f r = light.position - point;
Eigen::Vector3f l = r.normalized();
Eigen::Vector3f v = (eye_pos - point).normalized();
Eigen::Vector3f h = (l + v).normalized();
Eigen::Vector3f ambient = ka.cwiseProduct(amb_light_intensity);
Eigen::Vector3f diffuse = kd.cwiseProduct(light.intensity) / (r.dot(r)) * std::max((float)0.0, normal.normalized().dot(l));
Eigen::Vector3f specular = ks.cwiseProduct(light.intensity) / (r.dot(r)) * std::max((float)0.0, pow(normal.normalized().dot(h), p));
// components are. Then, accumulate that result on the *result_color* object.
result_color = result_color + ambient + diffuse + specular;
}
return result_color * 255.f;
}
我们编译,在命令行输入命令
./Rasterizer output.png phong

texture_fragment_shader()的实现
纹理shader的实现其实就是用u,v去纹理图去找对应的颜色,我们需要知道该点像素的u和v,需要使用重心公式,其实现方式为:
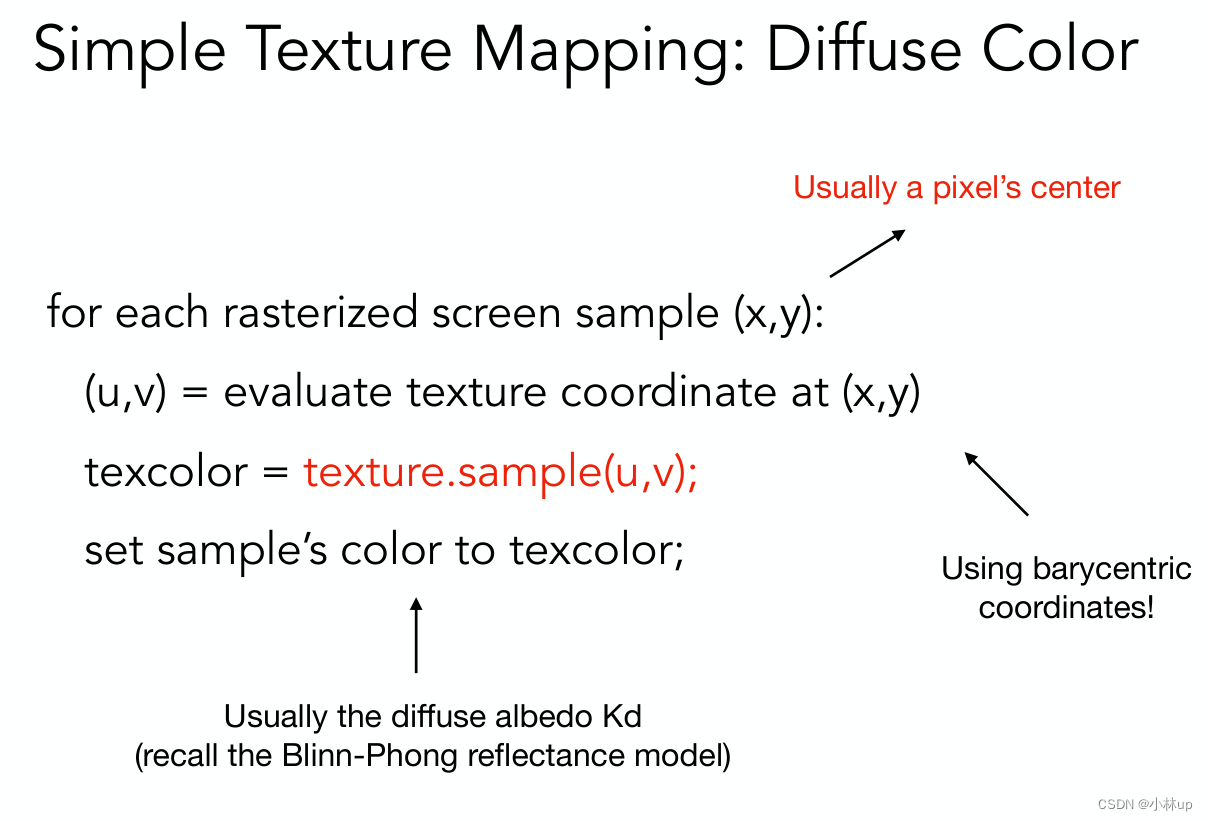
详细原理可以看:计算机图形学七:纹理映射(Texture Mapping)及Mipmap技术
Eigen::Vector3f texture_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f return_color = {0, 0, 0};
if (payload.texture)
{
// TODO: Get the texture value at the texture coordinates of the current fragment
float u = payload.tex_coords[0];
float v = payload.tex_coords[1];
return_color = payload.texture->getColor(u, v);
}
Eigen::Vector3f texture_color;
texture_color << return_color.x(), return_color.y(), return_color.z();
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = texture_color / 255.f;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = texture_color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
Eigen::Vector3f result_color = {0, 0, 0};
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
// components are. Then, accumulate that result on the *result_color* object.
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
Eigen::Vector3f r = light.position - point;
Eigen::Vector3f l = r.normalized();
Eigen::Vector3f v = (eye_pos - point).normalized();
Eigen::Vector3f h = (l + v).normalized();
Eigen::Vector3f ambient = ka.cwiseProduct(amb_light_intensity);
Eigen::Vector3f diffuse = kd.cwiseProduct(light.intensity) / (r.dot(r)) * std::max((float)0.0, normal.dot(l));
Eigen::Vector3f specular = ks.cwiseProduct(light.intensity) / (r.dot(r)) * std::max((float)0.0, pow(normal.dot(h), p));
// components are. Then, accumulate that result on the *result_color* object.
result_color = result_color + ambient + diffuse + specular;
}
return result_color * 255.f;
}
和Phong Shading差不多,只不过这里我们使用的颜色要从纹理获得(实现的原理也很简单,通过u和v进行颜色的映射),而不是想Phong Shading里使用的是模型自己的颜色,关键代码在这里:
if (payload.texture)
{
// TODO: Get the texture value at the texture coordinates of the current fragment
float u = payload.tex_coords[0];
float v = payload.tex_coords[1];
return_color = payload.texture->getColor(u, v);
}
这里的tex_coords是通过rasterize_triangle()函数而来(回想我们在这个函数进行了纹理、法线、纹理坐标、颜色的插值得到像素点的最终渲染的属性,最后生成一个payload作为参数给渲染器帮我们着色,tex_coords在这个函数里是interpolated_texcoords,它是通过三角形的三个顶点的纹理坐标得来的,而三角形的三个纹理坐标我们是在main函数通过setTexCoord函数实现的)。
我们可以查看getColor源码的实现,注意这里为了防止数组的越界,我们需要给u和v设定范围限制(对应前面的四句if代码)。
Eigen::Vector3f getColor(float u, float v)
{
if(u<0) u=0;
if(v<0) v=0;
if(u>1) u=1;
if(v>1) v=1;
auto u_img = u * width;
auto v_img = (1 - v) * height;
auto color = image_data.at<cv::Vec3b>(v_img, u_img);
return Eigen::Vector3f(color[0], color[1], color[2]);
}
我们编译,在命令行输入命令
./Rasterizer output.png texture

bump_fragment_shader()的实现
bump mapping的思想是在像素的表面进行微小的高度变化(使用纹理)计算扰动点的法向量(只在渲染计算的时候做,实际并没有改变像素的高度)
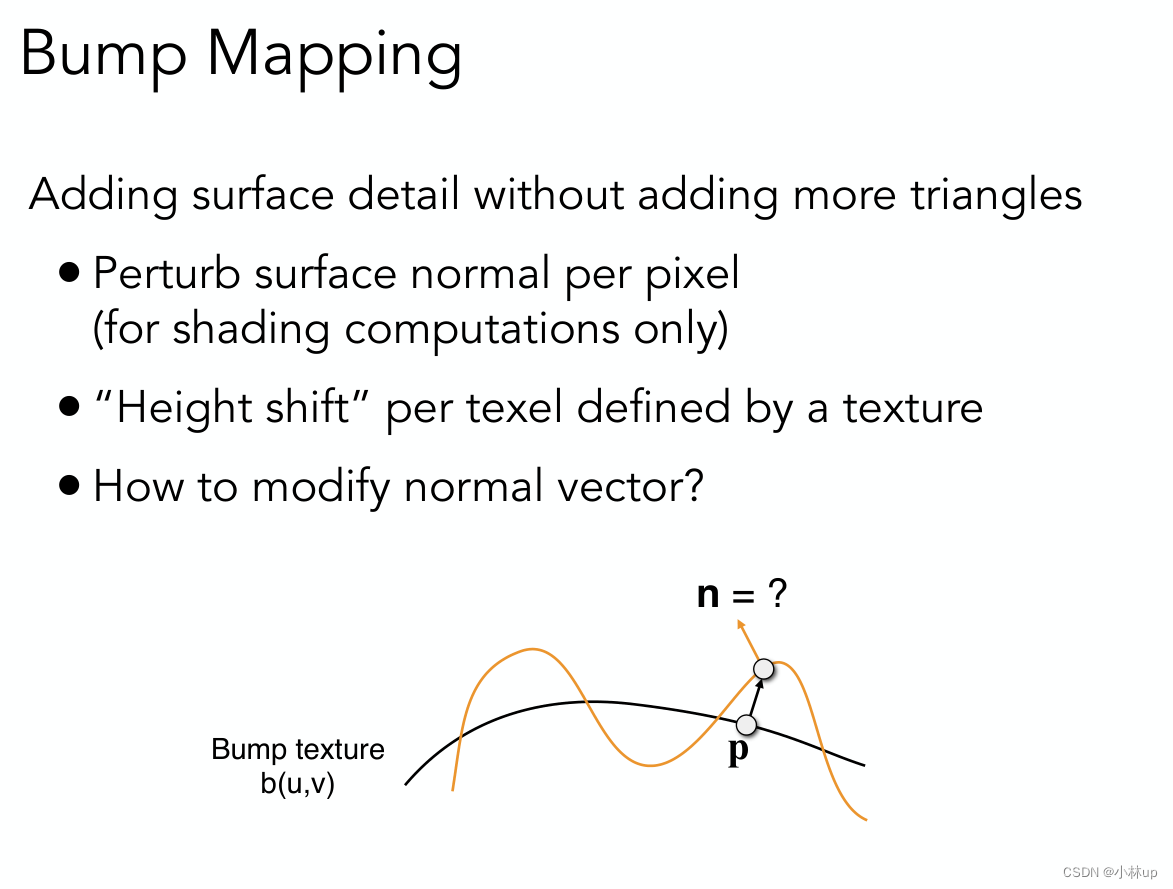
二维的实现

这里如图像素对应的切向量的是(1,dp),所以法向量就是(-dp,1).。
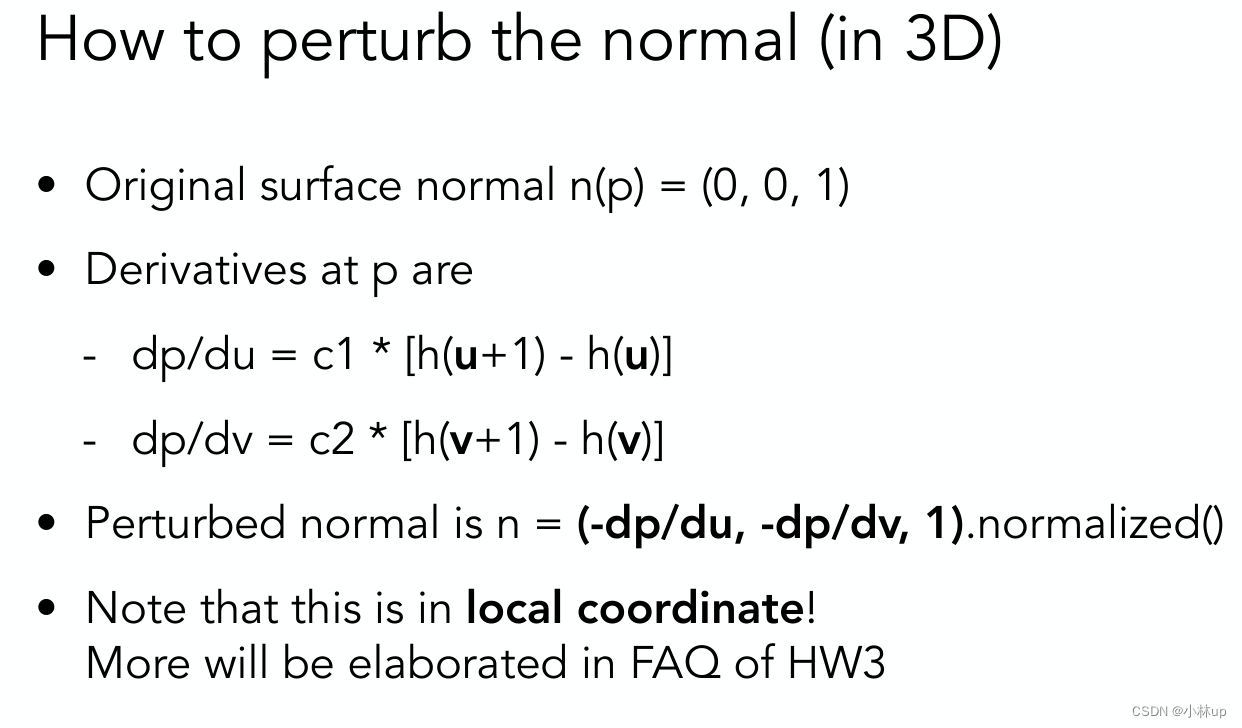
三维的实现也是同样的,沿u方向和v方向的的切向量分别是(1,0,dp/du)和(0,1,dp/dv)(u和v是纹理坐标的方向,对应的是x轴和y轴,u和v方向垂直)。所以法向量要和这两个切向量垂直为(-dp/du,-dp/dv,1),读者可以检验一下法向量和这两个切向量的垂直性。
根据注释写代码:这里使用的TBN矢量中,N是法线方向(normal),代码里取的是 ( x , y , z ) (x,y,z) (x,y,z),B和T分别在切线空间里,注释提示我们T这里取的是 ( x y ( x 2 + z 2 ) , x 2 + z 2 , z y x 2 + z 2 ) (\frac{xy}{\sqrt(x^2+z^2)},\sqrt{x^2+z^2},\frac{zy}{\sqrt{x^2+z^2}}) ((x2+z2)xy,x2+z2,x2+z2zy),尽管这个T的模是1,我们可以很容易地检验这是一个单位向量:
( x y x 2 + z 2 ) 2 + ( x 2 + z 2 ) 2 + ( z y x 2 + z 2 ) 2 = x 2 y 2 x 2 + z 2 + x 2 + z 2 + z 2 y 2 x 2 + z 2 = x 2 y 2 + x 4 + 2 x 2 z 2 + z 4 + z 2 y 2 x 2 + z 2 = x 2 y 2 + x 4 + x 2 z 2 + x 2 z 2 + z 4 + z 2 y 2 x 2 + z 2 = x 2 ( x 2 + y 2 + z 2 ) + z 2 ( x 2 + y 2 + z 2 ) x 2 + z 2 ( x 2 + y 2 + z 2 = 1 ) = x 2 + z 2 x 2 + z 2 = 1 \begin{aligned} &\left(\frac{xy}{\sqrt{x^2+z^2}}\right)^2+\left(\sqrt{x^2+z^2}\right)^2+(\frac{zy}{\sqrt{x^2+z^2}})^2\\ =&\frac{x^2y^2}{x^2+z^2}+x^2+z^2+\frac{z^2y^2}{x^2+z^2}\\ =&\frac{x^2y^2+x^4+2x^2z^2+z^4+z^2y^2}{x^2+z^2}\\ =&\frac{x^2y^2+x^4+x^2z^2+x^2z^2+z^4+z^2y^2}{x^2+z^2}\\ =&\frac{x^2(x^2+y^2+z^2)+z^2(x^2+y^2+z^2)}{x^2+z^2}\quad(x^2+y^2+z^2=1)\\ =&\frac{x^2+z^2}{x^2+z^2}=1\end{aligned} =====(x2+z2xy)2+(x2+z2)2+(x2+z2zy)2x2+z2x2y2+x2+z2+x2+z2z2y2x2+z2x2y2+x4+2x2z2+z4+z2y2x2+z2x2y2+x4+x2z2+x2z2+z4+z2y2x2+z2x2(x2+y2+z2)+z2(x2+y2+z2)(x2+y2+z2=1)x2+z2x2+z2=1
但是这里我认为是有问题的,但是它和N并不垂直。
N ⋅ T = ( x , y , z ) ⋅ ( x y ( x 2 + z 2 ) , x 2 + z 2 , z y x 2 + z 2 ) = 2 x 2 y + 2 z 2 y x 2 + z 2 \begin{aligned}&N\cdot T\\ =&(x,y,z)\cdot(\frac{xy}{\sqrt(x^2+z^2)},\sqrt{x^2+z^2},\frac{zy}{\sqrt{x^2+z^2}})\\ =&\frac{2x^2y+2z^2y}{\sqrt{x^2+z^2}}\end{aligned} ==N⋅T(x,y,z)⋅((x2+z2)xy,x2+z2,x2+z2zy)x2+z22x2y+2z2y
正确的应该是:
T
=
(
−
x
y
(
x
2
+
z
2
)
,
x
2
+
z
2
,
−
z
y
x
2
+
z
2
)
T=(-\frac{xy}{\sqrt(x^2+z^2)},\sqrt{x^2+z^2},-\frac{zy}{\sqrt{x^2+z^2}})
T=(−(x2+z2)xy,x2+z2,−x2+z2zy),这个博客画了这个T在三维坐标下的图(TBN三个矢量应该是相互垂直的!),画得还是比较清楚的【图源games101——作业3】:
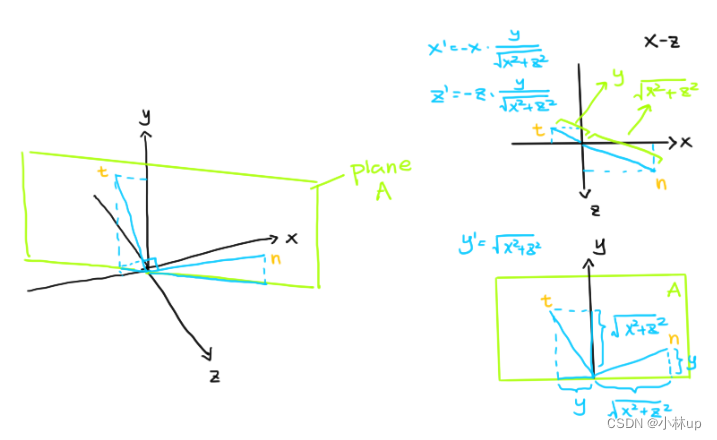
而B向量就是T和N的叉乘的结果了
Eigen::Vector3f bump_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
float kh = 0.2, kn = 0.1;
// TODO: Implement bump mapping here
// Let n = normal = (x, y, z)
// Vector t = (x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z))
// Vector b = n cross product t
// Matrix TBN = [t b n]
// dU = kh * kn * (h(u+1/w,v)-h(u,v))
// dV = kh * kn * (h(u,v+1/h)-h(u,v))
// Vector ln = (-dU, -dV, 1)
// Normal n = normalize(TBN * ln)
float x = normal.x();
float y = normal.y();
float z = normal.z();
Eigen::Vector3f t = {-x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),-z*y/sqrt(x*x+z*z)};
Eigen::Vector3f b = normal.cross(t);
Eigen::Matrix3f TBN;
TBN << t.x(), b.x(), normal.x(),
t.y(), b.y(), normal.y(),
t.z(), b.z(), normal.z();
float u = payload.tex_coords.x();
float v = payload.tex_coords.y();
float w = payload.texture->width;
float h = payload.texture->height;
float dU = kh * kn * (payload.texture->getColor(u + 1.0 / w, v).norm() - payload.texture->getColor(u, v).norm());
float dV = kh * kn * (payload.texture->getColor(u, v + 1.0 / h).norm() - payload.texture->getColor(u, v). norm());
Eigen::Vector3f ln = {-dU, -dV, 1};
normal = (TBN * ln).normalized();
Eigen::Vector3f result_color = {0, 0, 0};
result_color = normal;
return result_color * 255.f;
}
我们用下面的代码得到全局的TBN矩阵(我们最终的法向量还是要在相机空间里表示的,这是一个全局的变换矩阵):
Eigen::Vector3f t = {-x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),-z*y/sqrt(x*x+z*z)};
Eigen::Vector3f b = normal.cross(t);
Eigen::Matrix3f TBN;
TBN << t.x(), b.x(), normal.x(),
t.y(), b.y(), normal.y(),
t.z(), b.z(), normal.z();
然后我们需要计算再沿纹理图u和v方向的像素的变化量,计算导数用的是差分的方式再乘上一个系数:
float dU = kh * kn * (payload.texture->getColor(u + 1.0 / w, v).norm() - payload.texture->getColor(u, v).norm());
float dV = kh * kn * (payload.texture->getColor(u, v + 1.0 / h).norm() - payload.texture->getColor(u, v). norm());
注释提示这样求扰动后的法向量:
// Vector ln = (-dU, -dV, 1)
// Normal n = normalize(TBN * ln)
是先求扰动后的法向量(但没有归一化)再转换为相机空间的法向量,然后再归一化,而不是像ppt说的先对法向量归一化再转换到相机空间,猜测把归一化放到后面能减少一定的浮点误差,提前归一化要进行开平方根操作会造成变换到相机空间的误差。
Eigen::Vector3f ln = {-dU, -dV, 1};
normal = (TBN * ln).normalized();
我们编译,在命令行输入命令
./Rasterizer output.png bump
displacement_fragment_shader()的实现
位移贴图displacement mapping除了类似凹凸贴图,改变了法向量,而且实际移动了三维空间中点的位置,进而直接影响 Blinn-Phong 模型中的 l l l和 v v v。
Eigen::Vector3f displacement_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
float kh = 0.2, kn = 0.1;
// TODO: Implement displacement mapping here
// Let n = normal = (x, y, z)
// Vector t = (x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z))
// Vector b = n cross product t
// Matrix TBN = [t b n]
// dU = kh * kn * (h(u+1/w,v)-h(u,v))
// dV = kh * kn * (h(u,v+1/h)-h(u,v))
// Vector ln = (-dU, -dV, 1)
// Position p = p + kn * n * h(u,v)
// Normal n = normalize(TBN * ln)
float x = normal.x();
float y = normal.y();
float z = normal.z();
Eigen::Vector3f t = {x*y/sqrt(x*x+z*z),sqrt(x*x+z*z),z*y/sqrt(x*x+z*z)};
Eigen::Vector3f b = normal.cross(t);
Eigen::Matrix3f TBN;
TBN << t.x(), b.x(), normal.x(),
t.y(), b.y(), normal.y(),
t.z(), b.z(), normal.z();
float u = payload.tex_coords.x();
float v = payload.tex_coords.y();
float w = payload.texture->width;
float h = payload.texture->height;
float dU = kh * kn * (payload.texture->getColor(u + 1.0/w, v).norm() - payload.texture->getColor(u, v).norm());
float dV = kh * kn * (payload.texture->getColor(u, v + 1.0 / h).norm() - payload.texture->getColor(u, v). norm());
Eigen::Vector3f ln = {-dU, -dV, 1};
point = point + kn * normal * payload.texture->getColor(u, v).norm();
normal = (TBN * ln).normalized();
Eigen::Vector3f result_color = {0, 0, 0};
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
Eigen::Vector3f r = light.position - point;
Eigen::Vector3f l = r.normalized();
Eigen::Vector3f v = (eye_pos - point).normalized();
Eigen::Vector3f h = (l + v).normalized();
Eigen::Vector3f ambient = ka.cwiseProduct(amb_light_intensity);
Eigen::Vector3f diffuse = kd.cwiseProduct(light.intensity) / (r.dot(r)) * std::max((float)0, normal.dot(l));
Eigen::Vector3f specular = ks.cwiseProduct(light.intensity) / (r.dot(r)) * std::max((float)0, pow(normal.dot(h), p));
// components are. Then, accumulate that result on the *result_color* object.
result_color = result_color + ambient + diffuse + specular;
}
return result_color * 255.f;
}
和bump mapping最主要的区别在于:
point = point + kn * normal * payload.texture->getColor(u, v).norm();
改变了顶点的坐标(沿着原来的发现的方向),顶点的坐标等于原顶点的坐标加法线向量乘系数kn乘纹理在该位置的颜色的模长,然后也是使用phong shading来渲染
我们编译,输入命令:
./Rasterizer output.png displacement

尝试其他的obj模型
参考的Games101|作业3 + shading + 双线性插值 + 疑惑
需要安装meshlab,参考ubuntu安装meshlab,全网最简单的方法
记得改路径
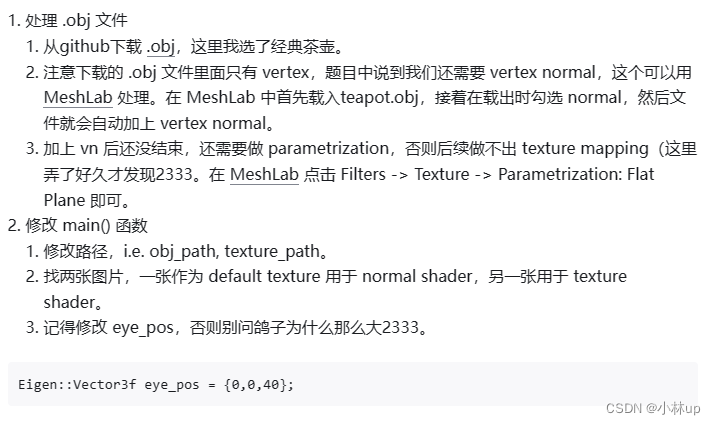
记得该eye_pos!!!没有改可能会出现段错误,图形跑到700*700的框框外面去了,找不到对应的颜色。
输出时应该是下面这样(输出为obj)
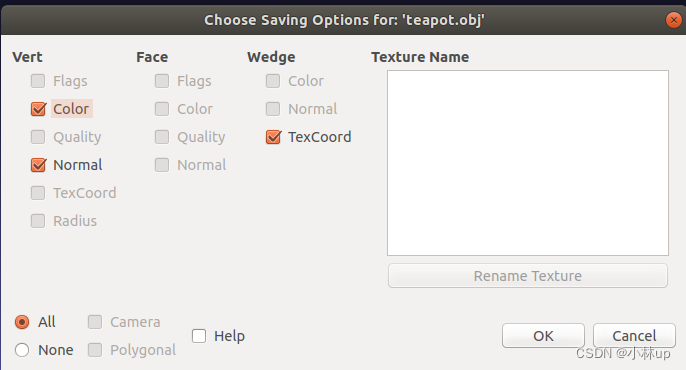
然后文件夹下除了obj还有obj.mtl格式的文件,没有的话texture可能出问题(我这里保存的是teapot2.obj和teapot.obj.mtl)
记得main函数修改路径:obj_path、loadout、texture_path。
normal shader

phong shader
bump shader 有点过于粗糙的感觉
texture shader
displacement shader

双线性插值
找个压缩图片的网站,我们把小奶牛的texture压缩为512*512的(原来是1024*1024的)保存下来,在把texture的路径改为这个512*512的。
OKTools-图片压缩
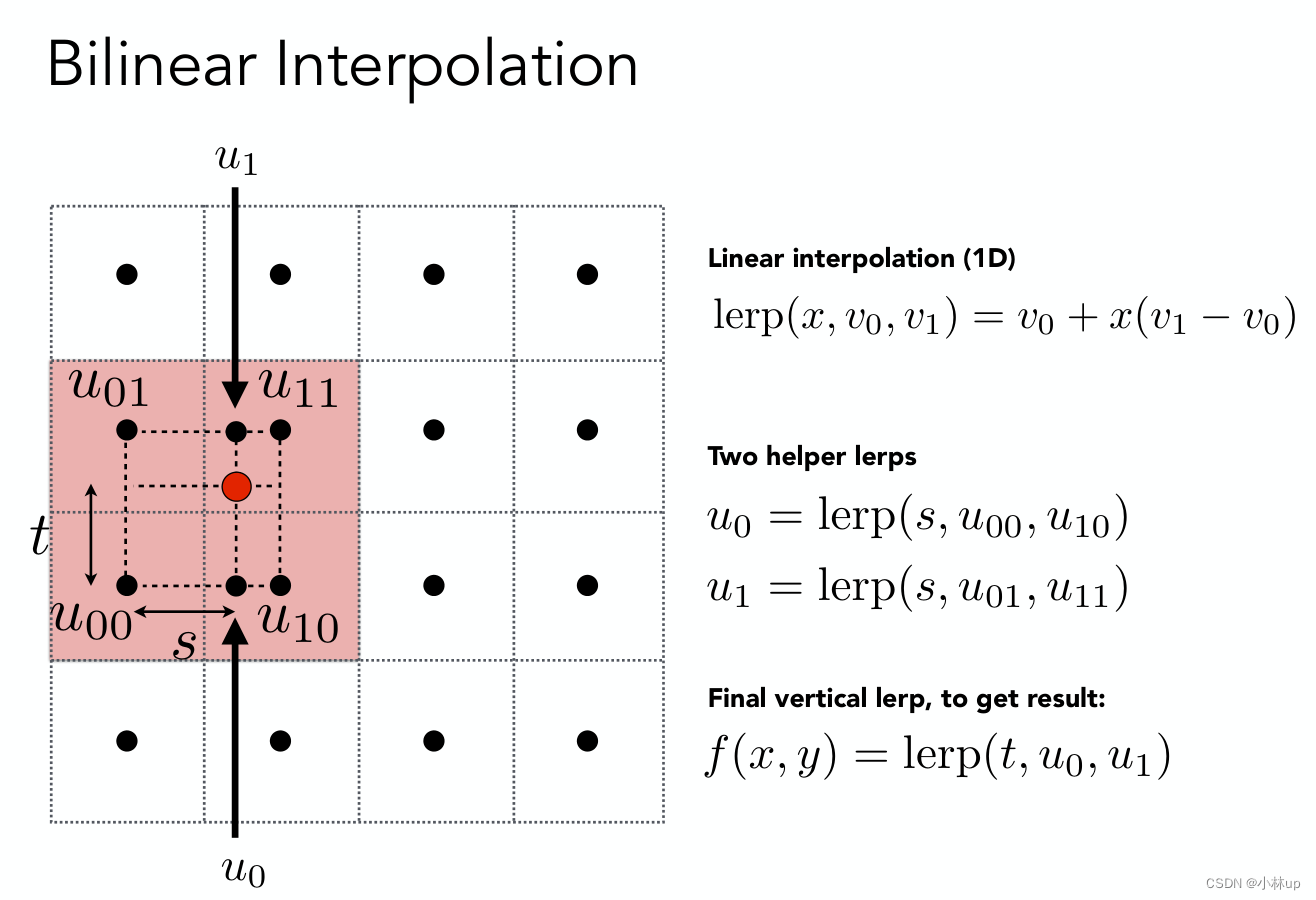
找到四个顶点,先沿宽度方向插值,再沿高度方向插值。
getColorBilinear
Eigen::Vector3f getColorBilinear(float u, float v)
{
if(u<0) u=0;
if(v<0) v=0;
if(u>1) u=1;
if(v>1) v=1;
auto u_img = u * width;
auto v_img = (1 - v) * height;
float ul = floor(u_img);
float uh = ceil(u_img);
float vl = floor(v_img);
float vh = ceil(v_img);
float s = (u_img - ul) / (uh - ul);
float t = (v_img - vl) / (vh - vl);
// 双线性插值
auto color_o = image_data.at<cv::Vec3b>(v_img, u_img);
auto color_00 = image_data.at<cv::Vec3b>(vl, ul);//color的序号按照u,v的顺序来,大值对应h,小值对应l
auto color_01 = image_data.at<cv::Vec3b>(vh, ul);
auto color_10 = image_data.at<cv::Vec3b>(vl, uh);
auto color_11 = image_data.at<cv::Vec3b>(vh, uh);
auto color_lerp1 = (1 - s) * color_00 + s * color_10;
auto color_lerp2 = (1 - s) * color_01 + s * color_11;
auto color = (1 - t) * color_lerp1 + t * color_lerp2 ;
return Eigen::Vector3f(color[0], color[1], color[2]);
}
};
记得把texture_fragment_shader获取颜色的方法改为双线性插值的方法getColorBilinear,主要是这一段代码:
if (payload.texture)
{
// TODO: Get the texture value at the texture coordinates of the current fragment
float u = payload.tex_coords[0];
float v = payload.tex_coords[1];
// return_color = payload.texture->getColor(u, v);
return_color = payload.texture->getColorBilinear(u, v);
}
测试:使用双线性插值:

不使用双线性插值:

可以看到效果还是很明显的。
另外关于作业3框架的一些问题可以参考这篇知乎的文章,写的很好:《GAMES101》作业框架问题详解,尽管作业里的深度插值用的不是真实的深度,但是我们还是得到了正确的效果(题目也说了,深度处理为了正值,离相机越近深度是越小的,深度相当于做了一个线性的映射到0.1到50,不过深度的大小情况是不变的,该靠近相机的还是靠近相机,所以我们最后还是可以看到这只牛牛)。
其他记录:

















 1511
1511











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









