







原文链接 http://blog.sina.com.cn/s/blog_a98e39a201017pgn.html#cmt_2366323
博主 dzh_漫漫修行路的博客
示例程序048--SIFT、SURF匹配点的坐标
// 特征点匹配.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <opencv2/nonfree/features2d.hpp>
using namespace cv;
int main( int argc, char** argv )
{
//Mat img_1=imread("image0.jpg");
//Mat img_2=imread("image1.jpg");
//Mat img_1=imread("box.png");
//Mat img_2=imread("box_in_scene.png");
Mat img_1=imread("Lena.jpg");
Mat img_2=imread("Lena_wrap_rotate.jpg");
if( !img_1.data || !img_2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400;
SiftFeatureDetector detector( minHessian );
//SurfFeatureDetector detector( minHessian );
std::vector keypoints_1, keypoints_2;
detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 );
//-- Step 2: Calculate descriptors (feature vectors)
SiftDescriptorExtractor extractor;
//SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute( img_1, keypoints_1, descriptors_1 );
extractor.compute( img_2, keypoints_2, descriptors_2 );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist )
//-- PS.- radiusMatch can also be used here.
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_1.rows; i++ )
{ if( matches[i].distance < 2*min_dist )
{ good_matches.push_back( matches[i]); }
}
//-- Draw only "good" matches
Mat img_matches;
drawMatches( img_1, keypoints_1, img_2, keypoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//-- Show detected matches
imshow( "Good Matches", img_matches );
//imwrite("Lena_match_surf.jpg",img_matches);
//imwrite("Lena_match_sift.jpg",img_matches);
for( int i = 0; i < good_matches.size(); i++ )
//{
// printf( "-- Good Match [%d] Keypoint 1: %d
//}
{
//good_matches[i].queryIdx保存着第一张图片匹配点的序号,keypoints_1[good_matches[i].queryIdx].pt.x 为该序号对应的点的x坐标。y坐标同理
//good_matches[i].trainIdx保存着第二张图片匹配点的序号,keypoints_2[good_matches[i].trainIdx].pt.x 为为该序号对应的点的x坐标。y坐标同理
printf( "-- Good Match [%d] Keypoint 1(%f,%f): %d
keypoints_1[good_matches[i].queryIdx].pt.x,keypoints_1[good_matches[i].queryIdx].pt.y,good_matches[i].queryIdx,
keypoints_2[good_matches[i].trainIdx].pt.x,keypoints_2[good_matches[i].trainIdx].pt.y,good_matches[i].trainIdx );
}
waitKey(0);
return 0;
}
运行结果:
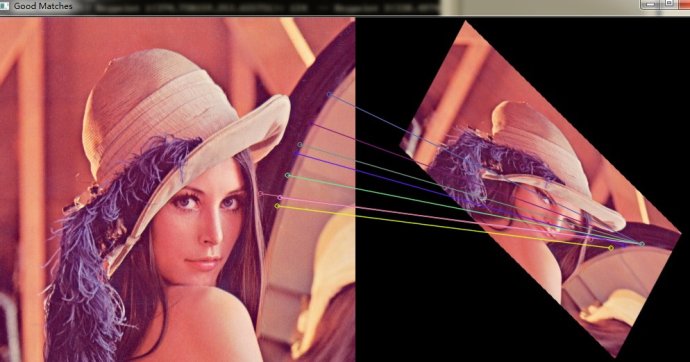

得到了匹配点的显式坐标 便于下一步分析(因为我渣啊)















 2833
2833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









