






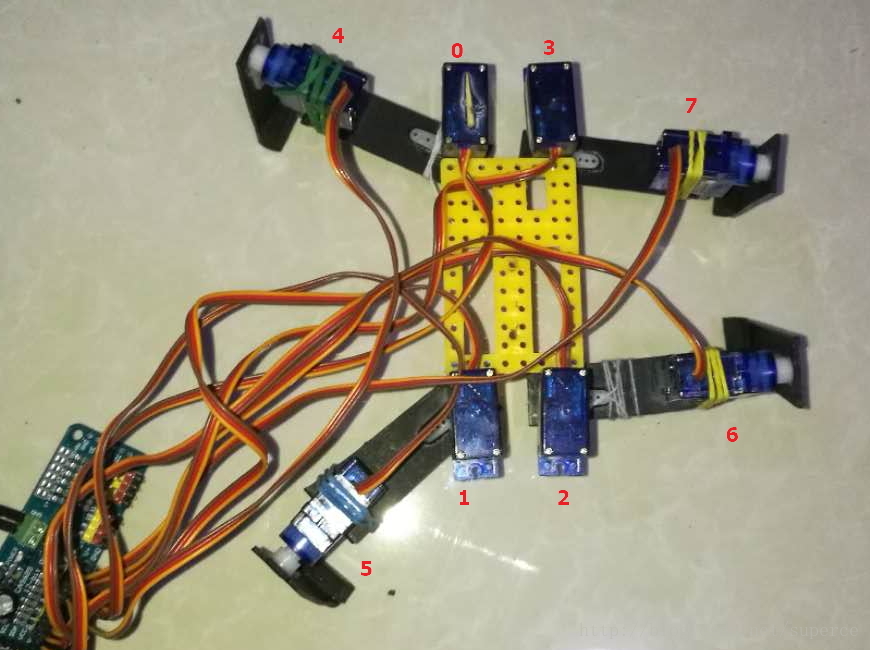
四足机器人外观和结构
前进代码
/* USER CODE BEGIN 2 */
printf("INIT begin\n");
PCA9685_Go();
SetPWMFreq(50);
printf("INIT\n");
SetPWM(0, 0, SERVO045);
SetPWM(1, 0, SERVO135);
SetPWM(2, 0, SERVOMIN);
S
 本文介绍如何使用PCA9685模块控制8个SG90舵机,实现四足机器人的行走功能。详细阐述了四足机器人的外观结构,并给出了实现前进动作的代码段。
本文介绍如何使用PCA9685模块控制8个SG90舵机,实现四足机器人的行走功能。详细阐述了四足机器人的外观结构,并给出了实现前进动作的代码段。
/* USER CODE BEGIN 2 */
printf("INIT begin\n");
PCA9685_Go();
SetPWMFreq(50);
printf("INIT\n");
SetPWM(0, 0, SERVO045);
SetPWM(1, 0, SERVO135);
SetPWM(2, 0, SERVOMIN);
S 1261
1261

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















