






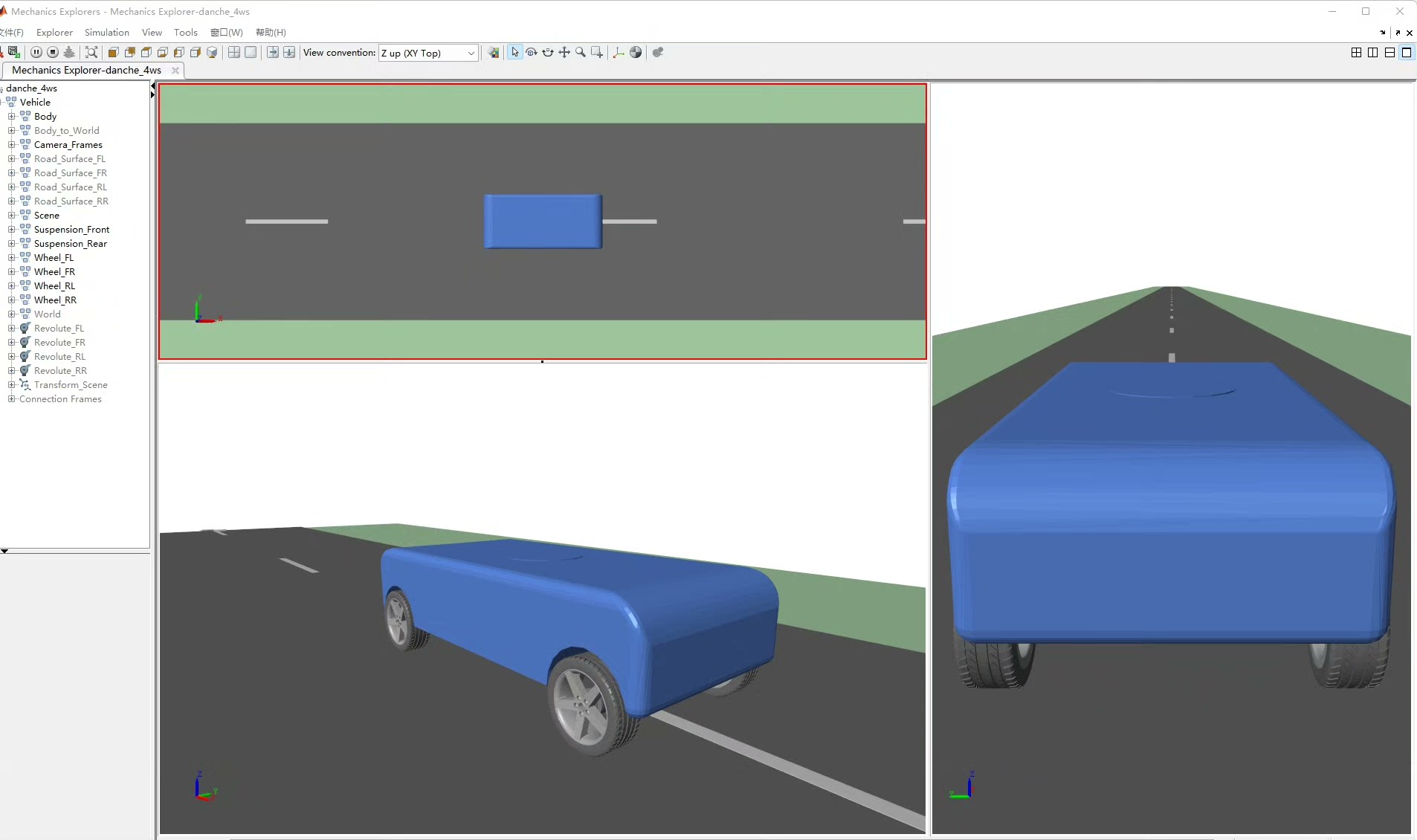
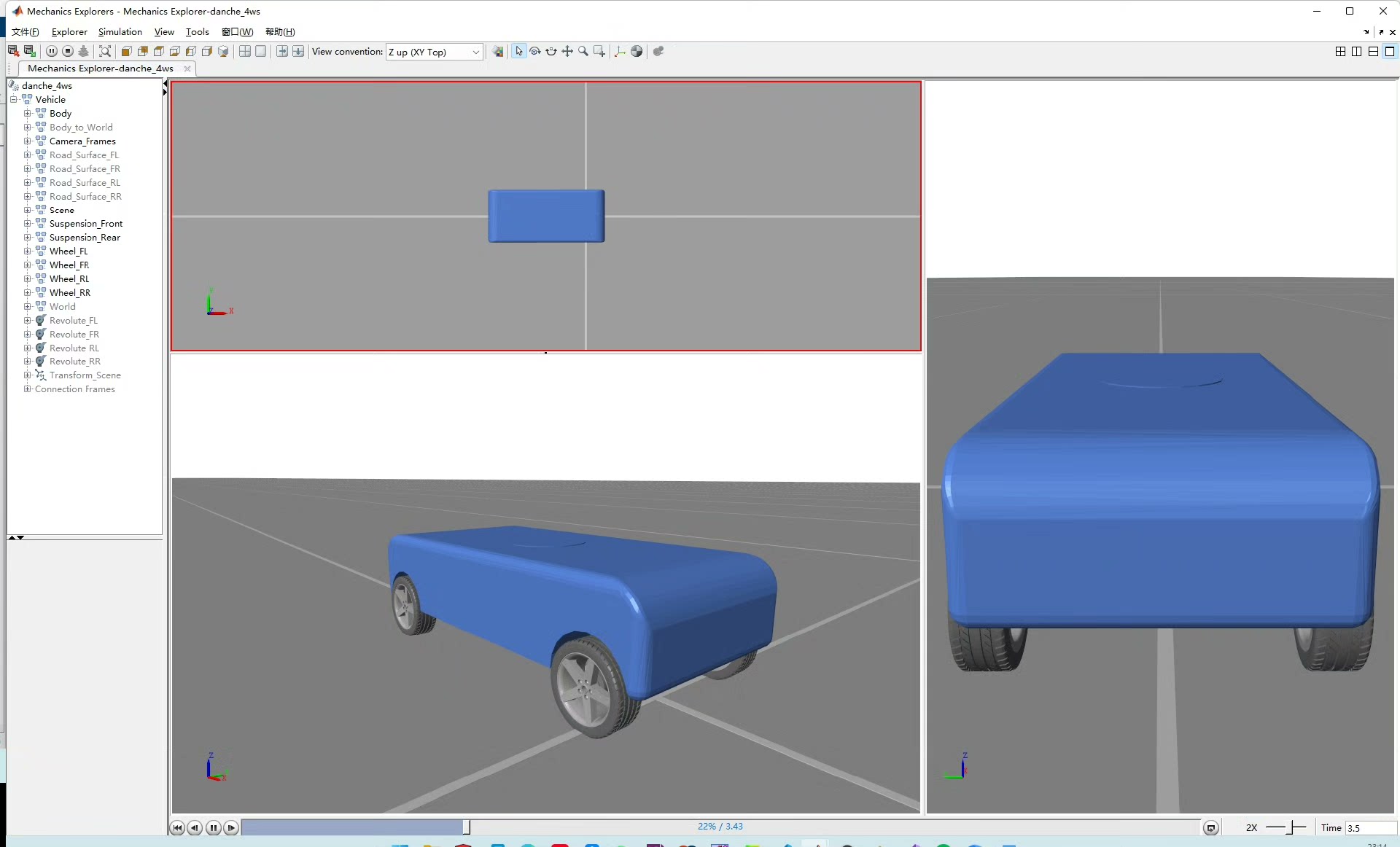
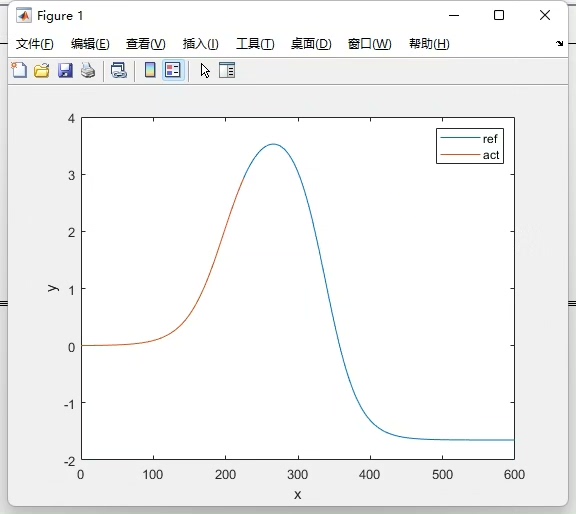
四轮转向汽车模型预测控制(MPC)路径跟踪
simulink-simscape仿真,无需carsim。
mpc基于车辆动力学模型设计,纵向PID控制。
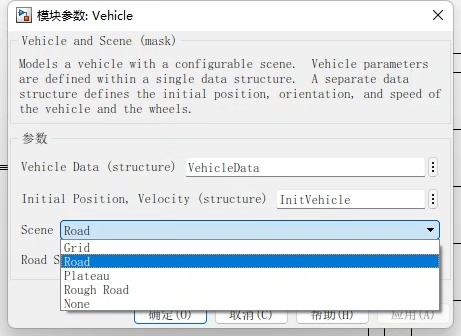
支持平坦路面,颠簸路面切换,外形变化。
魔术公式轮胎模型。
注:MATLAB要求2022a及以上版本
ID:2835731992710045
707AA
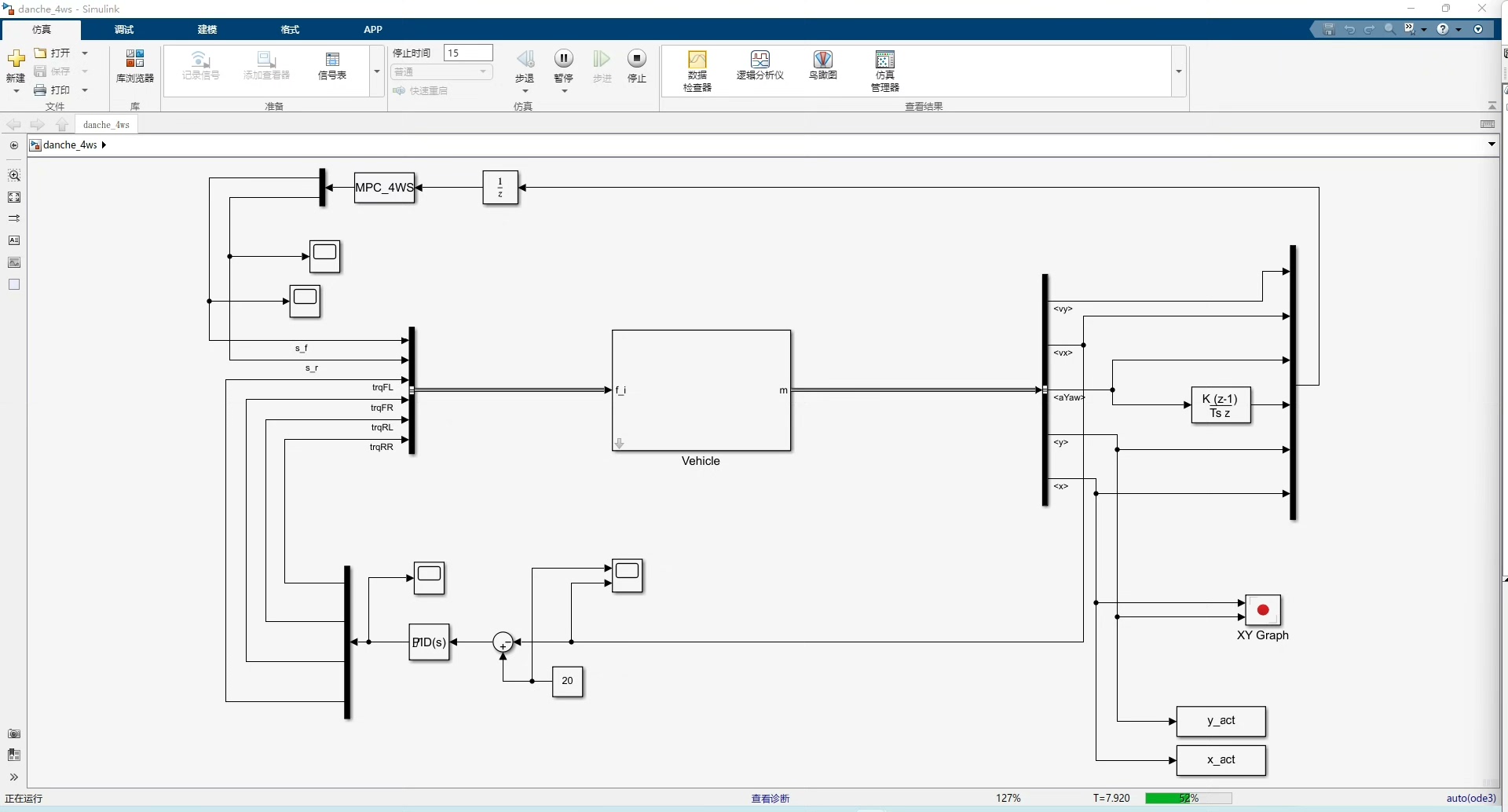
四轮转向汽车模型预测控制(MPC)路径跟踪是一种基于车辆动力学模型设计的控制算法,可以实现对汽车在路面上的精确轨迹跟踪。本文将介绍如何利用simulink-simscape进行仿真,而无需使用carsim。同时,我们还将讨论如何基于纵向PID控制实现路径跟踪,并支持平坦路面、颠簸路面的切换以及外形变化。另外,我们将使用魔术公式轮胎模型来提高路径跟踪的精度。
在路径跟踪中,MPC使用车辆动力学模型来预测车辆未来的轨迹,并通过调整车辆的操纵输入来实现轨迹跟踪。与传统的PID控制相比,MPC能够考虑到车辆动力学模型的特性,更加精确地控制车辆的行驶轨迹。
在Simulink中,我们可以使用Simscape工具箱来建模和仿真汽车的动力学行为。通过建立车辆的动力学模型,我们可以获取车辆的速度、加速度以及车辆的操纵输入。同时,我们可以将MPC算法应用于该模型,使得车辆能够按照预定的路径进行精确的跟踪。
与传统的路径跟踪算法相比,该方法的一个显著特点是无需依赖carsim软件。相反,我们可以通过Simscape工具箱来建立车辆的动力学模型,从而实现路径跟踪控制。这种方法的优势在于使得整个系统更加简洁高效,并且减少了依赖外部软件的复杂性。
在路径跟踪的过程中,纵向控制是其中一个重要的环节。在本方法中,我们采用了纵向PID控制算法,以实现车辆的速度控制。通过调整油门和刹车的输出,我们可以控制车辆的速度,使其能够按照预定的轨迹进行跟踪。
此外,我们的方法还支持平坦路面和颠簸路面的切换以及外形变化。在平坦路面下,车辆的动力学特性较为稳定,因此路径跟踪相对容易实现。而在颠簸路面下,车辆的动力学特性会受到振动的影响,因此路径跟踪的精确度会有所降低。为了解决这个问题,我们可以通过调整MPC算法的参数,来适应不同路面条件下的路径跟踪需求。此外,我们还可以通过使用魔术公式轮胎模型来提高路径跟踪的精度,从而更好地适应外形变化。
总之,通过simulink-simscape仿真,无需carsim,我们可以实现四轮转向汽车模型预测控制(MPC)路径跟踪。该方法基于车辆动力学模型设计,结合纵向PID控制和魔术公式轮胎模型,能够实现对平坦路面和颠簸路面下车辆的精确跟踪。该方法对于要求精确路径跟踪的应用场景具有重要的实际意义。
需要注意的是,为了使用本方法,MATLAB的版本需要在2022a及以上。这是因为本方法使用了一些新的特性和工具箱,需要较高的MATLAB版本支持。在使用过程中,请务必确保版本的兼容性。
希望本文对您了解四轮转向汽车模型预测控制(MPC)路径跟踪有所帮助,并能够在您的实际应用中发挥重要作用。如有任何问题或疑问,请随时与我们联系。感谢您的阅读!
【相关代码,程序地址】:http://fansik.cn/731992710045.html
















 1140
1140

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









