









先贴出github地址,欢迎大家批评指正:https://github.com/taifyang/yolo-inference
不知不觉LZ已经快工作两年了,由于之前的工作内容主要和模型部署相关,想着利用闲暇时间写一些推理方面的经验总结,于是有了这个工程。其实本来也是自己写了玩的,不过已经陆续迭代半年多了,期间也通过借签优秀代码吸收了经验,索性总结一下心得~
1.0 初始版本
1.1 支持多精度模型
1.2 支持tensorrt的cuda前后处理
1.3 支持onnxruntime的int8推理
1.4 onnxruntime推理代码采用cpp风格接口
1.5 采用抽象工厂和单例模式重构代码
1.6 增加cmake编译支持和重构python代码
1.7 增加Linux系统编译支持
2.0 增加yolov8检测器支持
2.1 增加cmake条件编译选项和自动化测试脚本
3.0 增加分类和分割算法支持
3.1 重构代码结构和缺陷修复
3.2 重构代码结构和添加注释
3.3 更新readme和缺陷修复
3.4 增加yolov6, yolov7, yolov9, yolov10检测器支持和缺陷修复
初始版本的接口类定义如下:
import cv2
import numpy as np
from enum import Enum
from abc import ABC, abstractclassmethod
...
class Device_Type(Enum):
CPU = 0
GPU = 1
class YOLOv5(ABC):
def infer(self, image_path:str) -> None:
self.image = cv2.imread(image_path)
self.result = self.image.copy()
self.pre_process()
self.process()
self.post_process()
cv2.imwrite("result.jpg", self.result)
cv2.imshow("result", self.result)
cv2.waitKey(0)
@abstractclassmethod
def pre_process(self) -> None:
pass
@abstractclassmethod
def process(self) -> None:
pass
@abstractclassmethod
def post_process(self) -> None:
pass
子类如YOLOv5_ONNXRuntime继承上述类:
import onnxruntime
from yolov5 import *
from utils import *
class YOLOv5_ONNXRuntime(YOLOv5):
def __init__(self, model_path:str, device_type:Device_Type) -> None:
super().__init__()
if device_type == Device_Type.CPU:
self.onnx_session = onnxruntime.InferenceSession(model_path, providers=['CPUExecutionProvider'])
if device_type == Device_Type.GPU:
self.onnx_session = onnxruntime.InferenceSession(model_path, providers=['CUDAExecutionProvider'])
self.input_name = []
for node in self.onnx_session.get_inputs():
self.input_name.append(node.name)
self.output_name = []
for node in self.onnx_session.get_outputs():
self.output_name.append(node.name)
self.inputs = {}
def pre_process(self) -> None:
input = letterbox(self.image, input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1).astype(dtype=np.float32) #BGR2RGB和HWC2CHW
input = input / 255.0
input = np.expand_dims(input, axis=0)
for name in self.input_name:
self.inputs[name] = input
def process(self) -> None:
self.outputs = self.onnx_session.run(None, self.inputs)
def post_process(self) -> None:
self.outputs = np.squeeze(self.outputs)
self.outputs = self.outputs[self.outputs[..., 4] > confidence_threshold]
classes_scores = self.outputs[..., 5:]
boxes = []
scores = []
class_ids = []
for i in range(len(classes_scores)):
class_id = np.argmax(classes_scores[i])
self.outputs[i][4] *= classes_scores[i][class_id]
self.outputs[i][5] = class_id
if self.outputs[i][4] > score_threshold:
boxes.append(self.outputs[i][:6])
scores.append(self.outputs[i][4])
class_ids.append(self.outputs[i][5])
boxes = np.array(boxes)
boxes = xywh2xyxy(boxes)
scores = np.array(scores)
indices = nms(boxes, scores, score_threshold, nms_threshold)
boxes = boxes[indices]
draw(self.result, boxes)
调用demo如下:
from yolov5_onnxruntime import *
yolov5 = YOLOv5_ONNXRuntime(model_path="yolov5n.onnx", device_type=Device_Type.CPU)
yolov5.infer("bus.jpg")
后续支持其他功能后调用demo增加了parse_args解析命令参数,通过importlib导入相应模块,并通过getattr通过类名获取类(反射机制),具体内容如下:
import argparse
import importlib
from yolov5 import *
def parse_args():
parser = argparse.ArgumentParser('yolov5')
parser.add_argument('--algo_type', default='ONNXRuntime', type=str, help='ONNXRuntime, OpenCV, OpenVINO, TensorRT')
parser.add_argument('--model_path', default='yolov5n_fp32.onnx', type=str, help='the path of model')
parser.add_argument('--device_type', default='cpu', type=str, help='cpu, gpu')
parser.add_argument('--model_type', default='fp32', type=str, help='fp32, fp16, int8')
return parser.parse_args()
if __name__ == '__main__':
args = parse_args()
algo_type = args.algo_type
algo = importlib.import_module('yolov5_' + algo_type.lower())
YOLOv5 = getattr(algo, 'YOLOv5_' + algo_type)
model_path = args.model_path
if args.device_type == 'cpu':
device_type = Device_Type.CPU
elif args.device_type == 'gpu':
device_type = Device_Type.GPU
if args.model_type == 'fp32':
model_type = Model_Type.FP32
elif args.model_type == 'fp16':
model_type = Model_Type.FP16
elif args.model_type == 'int8':
model_type = Model_Type.INT8
yolov5 = YOLOv5(model_path, device_type, model_type)
yolov5.infer("test.mp4")
在3.0版本中由于增加了对分类和分割算法的支持,以onnxruntime框架为例具体实现类如下:
import onnxruntime
from yolo import *
from utils import *
class YOLO_ONNXRuntime(YOLO):
def __init__(self, algo_type:Algo_Type, device_type:Device_Type, model_type:Model_Type, model_path:str) -> None:
super().__init__()
assert os.path.exists(model_path), "model not exists!"
if device_type == Device_Type.CPU:
self.onnx_session = onnxruntime.InferenceSession(model_path, providers=['CPUExecutionProvider'])
elif device_type == Device_Type.GPU:
self.onnx_session = onnxruntime.InferenceSession(model_path, providers=['CUDAExecutionProvider'])
self.algo_type = algo_type
self.model_type = model_type
self.input_name = []
for node in self.onnx_session.get_inputs():
self.input_name.append(node.name)
self.output_name = []
for node in self.onnx_session.get_outputs():
self.output_name.append(node.name)
self.input = {}
@abstractclassmethod
def pre_process(self) -> None:
pass
def process(self) -> None:
self.output = self.onnx_session.run(None, self.input)
@abstractclassmethod
def post_process(self) -> None:
pass
class YOLO_ONNXRuntime_Classification(YOLO_ONNXRuntime):
def pre_process(self) -> None:
if self.algo_type == Algo_Type.YOLOv5:
crop_size = min(self.image.shape[0], self.image.shape[1])
left = (self.image.shape[1] - crop_size) // 2
top = (self.image.shape[0] - crop_size) // 2
crop_image = self.image[top:(top+crop_size), left:(left+crop_size), ...]
input = cv2.resize(crop_image, self.input_shape)
input = input / 255.0
input = input - np.array([0.406, 0.456, 0.485])
input = input / np.array([0.225, 0.224, 0.229])
if self.algo_type == Algo_Type.YOLOv8:
self.input_shape = (224, 224)
if self.image.shape[1] > self.image.shape[0]:
self.image = cv2.resize(self.image, (self.input_shape[0]*self.image.shape[1]//self.image.shape[0], self.input_shape[0]))
else:
self.image = cv2.resize(self.image, (self.input_shape[1], self.input_shape[1]*self.image.shape[0]//self.image.shape[1]))
crop_size = min(self.image.shape[0], self.image.shape[1])
left = (self.image.shape[1] - crop_size) // 2
top = (self.image.shape[0] - crop_size) // 2
crop_image = self.image[top:(top+crop_size), left:(left+crop_size), ...]
input = cv2.resize(crop_image, self.input_shape)
input = input / 255.0
input = input[:, :, ::-1].transpose(2, 0, 1) #BGR2RGB和HWC2CHW
if self.model_type == Model_Type.FP32 or self.model_type == Model_Type.INT8:
input = np.expand_dims(input, axis=0).astype(dtype=np.float32)
elif self.model_type == Model_Type.FP16:
input = np.expand_dims(input, axis=0).astype(dtype=np.float16)
for name in self.input_name:
self.input[name] = input
def post_process(self) -> None:
output = np.squeeze(self.output).astype(dtype=np.float32)
if self.algo_type == Algo_Type.YOLOv5:
print("class:", np.argmax(output), " scores:", np.exp(np.max(output))/np.sum(np.exp(output)))
if self.algo_type == Algo_Type.YOLOv8:
print("class:", np.argmax(output), " scores:", np.max(output))
class YOLO_ONNXRuntime_Detection(YOLO_ONNXRuntime):
def pre_process(self) -> None:
input = letterbox(self.image, self.input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1) #BGR2RGB和HWC2CHW
input = input / 255.0
if self.model_type == Model_Type.FP32 or self.model_type == Model_Type.INT8:
input = np.expand_dims(input, axis=0).astype(dtype=np.float32)
elif self.model_type == Model_Type.FP16:
input = np.expand_dims(input, axis=0).astype(dtype=np.float16)
for name in self.input_name:
self.input[name] = input
def post_process(self) -> None:
output = np.squeeze(self.output[0]).astype(dtype=np.float32)
boxes = []
scores = []
class_ids = []
if self.algo_type == Algo_Type.YOLOv5:
output = output[output[..., 4] > self.confidence_threshold]
classes_scores = output[..., 5:85]
for i in range(output.shape[0]):
class_id = np.argmax(classes_scores[i])
obj_score = output[i][4]
cls_score = classes_scores[i][class_id]
output[i][4] = obj_score * cls_score
output[i][5] = class_id
if output[i][4] > self.score_threshold:
boxes.append(output[i][:6])
scores.append(output[i][4])
class_ids.append(output[i][5])
output[i][5:] *= obj_score
if self.algo_type == Algo_Type.YOLOv8:
for i in range(output.shape[0]):
classes_scores = output[..., 4:]
class_id = np.argmax(classes_scores[i])
output[i][4] = classes_scores[i][class_id]
output[i][5] = class_id
if output[i][4] > self.score_threshold:
boxes.append(output[i, :6])
scores.append(output[i][4])
class_ids.append(output[i][5])
boxes = np.array(boxes)
boxes = xywh2xyxy(boxes)
scores = np.array(scores)
indices = nms(boxes, scores, self.score_threshold, self.nms_threshold)
boxes = boxes[indices]
self.result = draw(self.image, boxes)
class YOLO_ONNXRuntime_Segmentation(YOLO_ONNXRuntime):
def pre_process(self) -> None:
input = letterbox(self.image, self.input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1) #BGR2RGB和HWC2CHW
input = input / 255.0
if self.model_type == Model_Type.FP32 or self.model_type == Model_Type.INT8:
input = np.expand_dims(input, axis=0).astype(dtype=np.float32)
elif self.model_type == Model_Type.FP16:
input = np.expand_dims(input, axis=0).astype(dtype=np.float16)
for name in self.input_name:
self.input[name] = input
def post_process(self) -> None:
output = np.squeeze(self.output[0]).astype(dtype=np.float32)
boxes = []
scores = []
class_ids = []
preds = []
if self.algo_type == Algo_Type.YOLOv5:
output = output[output[..., 4] > self.confidence_threshold]
classes_scores = output[..., 5:85]
for i in range(output.shape[0]):
class_id = np.argmax(classes_scores[i])
obj_score = output[i][4]
cls_score = classes_scores[i][class_id]
output[i][4] = obj_score * cls_score
output[i][5] = class_id
if output[i][4] > self.score_threshold:
boxes.append(output[i][:6])
scores.append(output[i][4])
class_ids.append(output[i][5])
output[i][5:] *= obj_score
preds.append(output[i])
if self.algo_type == Algo_Type.YOLOv8:
for i in range(output.shape[0]):
classes_scores = output[..., 4:84]
class_id = np.argmax(classes_scores[i])
output[i][4] = classes_scores[i][class_id]
output[i][5] = class_id
if output[i][4] > self.score_threshold:
boxes.append(output[i, :6])
scores.append(output[i][4])
class_ids.append(output[i][5])
preds.append(output[i])
boxes = np.array(boxes)
boxes = xywh2xyxy(boxes)
scores = np.array(scores)
indices = nms(boxes, scores, self.score_threshold, self.nms_threshold)
boxes = boxes[indices]
masks_in = np.array(preds)[indices][..., -32:]
proto= np.squeeze(self.output[1]).astype(dtype=np.float32)
c, mh, mw = proto.shape
masks = (1/ (1 + np.exp(-masks_in @ proto.reshape(c, -1)))).reshape(-1, mh, mw)
downsampled_bboxes = boxes.copy()
downsampled_bboxes[:, 0] *= mw / self.input_shape[0]
downsampled_bboxes[:, 2] *= mw / self.input_shape[0]
downsampled_bboxes[:, 3] *= mh / self.input_shape[1]
downsampled_bboxes[:, 1] *= mh / self.input_shape[1]
masks = crop_mask(masks, downsampled_bboxes)
self.result = draw(self.image, boxes, masks)
即YOLO基类派生出YOLO_ONNXRuntime等类,再由YOLO_ONNXRuntime类派生一系列具体算法实现子类。由于功能的扩充,此时调用方法变得比较臃肿:
import argparse
import importlib
from yolo import *
def parse_args():
parser = argparse.ArgumentParser('yolo_inference')
parser.add_argument('--algo_type', default='YOLOv8', type=str, help='YOLOv5, YOLOv8')
parser.add_argument('--backend_type', default='TensorRT', type=str, help='ONNXRuntime, OpenCV, OpenVINO, TensorRT')
parser.add_argument('--task_type', default='Segmentation', type=str, help='Classification, Detection, Segmentation')
parser.add_argument('--device_type', default='GPU', type=str, help='CPU, GPU')
parser.add_argument('--model_type', default='FP32', type=str, help='FP32, FP16, INT8')
parser.add_argument('--model_path', default='yolov8n_seg_fp32.engine', type=str, help='the path of model')
parser.add_argument('--input_path', default="bus.jpg", type=str, help='save result')
parser.add_argument('--output_path', default="", type=str, help='save result')
parser.add_argument('--show_result', default=False, type=bool, help='show result')
parser.add_argument('--save_result', default=True, type=bool, help='save result')
return parser.parse_args()
if __name__ == '__main__':
args = parse_args()
backend_type = args.backend_type
backend = importlib.import_module('yolo_' + backend_type.lower())
yolo = getattr(backend, 'YOLO_' + backend_type + '_' + args.task_type)
model_path = args.model_path
if args.algo_type == 'YOLOv5':
algo_type = Algo_Type.YOLOv5
if args.algo_type == 'YOLOv8':
algo_type = Algo_Type.YOLOv8
if args.task_type == 'Classification':
task_type = Task_Type.Classification
if args.task_type == 'Detection':
task_type = Task_Type.Detection
if args.task_type == 'Segmentation':
task_type = Task_Type.Segmentation
if args.device_type == 'CPU':
device_type = Device_Type.CPU
if args.device_type == 'GPU':
device_type = Device_Type.GPU
if args.model_type == 'FP32':
model_type = Model_Type.FP32
if args.model_type == 'FP16':
model_type = Model_Type.FP16
if args.model_type == 'INT8':
model_type = Model_Type.INT8
show_result = args.show_result and (task_type == Task_Type.Detection or task_type == Task_Type.Segmentation)
save_result = args.save_result and (task_type == Task_Type.Detection or task_type == Task_Type.Segmentation)
args.output_path = "./result/"+str(args.algo_type)+"_"+str(args.backend_type)+"_"+str(args.task_type)+"_"+str(args.device_type)+"_"+str(args.model_type)+".jpg"
yolo = yolo(algo_type, device_type, model_type, model_path)
yolo.infer(args.input_path, args.output_path, show_result, save_result)
3.1版本中,借签了https://github.com/ultralytics/ultralytics的做法,项目层级划分如下:

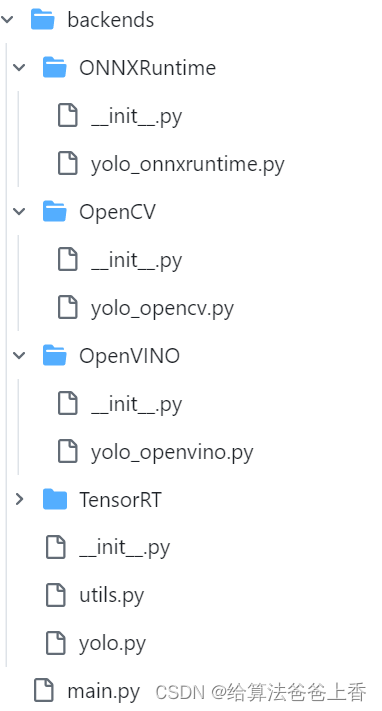
即将不同推理后端封装入算法包,此时yolo.py内容如下:
import os
import cv2
import time
from enum import Enum
import backends
class YOLO:
def __init__(self) -> None:
super().__init__()
self.score_threshold = 0.2
self.nms_threshold = 0.5
self.confidence_threshold = 0.2
self.input_shape = (640, 640)
def task_map(self):
return {
'ONNXRuntime':{
'Classify':backends.ONNXRuntime.YOLO_ONNXRuntime_Classify,
'Detect':backends.ONNXRuntime.YOLO_ONNXRuntime_Detect,
'Segment':backends.ONNXRuntime.YOLO_ONNXRuntime_Segment,
},
'OpenCV':{
'Classify':backends.OpenCV.YOLO_OpenCV_Classify,
'Detect':backends.OpenCV.YOLO_OpenCV_Detect,
#'Segment':tasks.OpenCV.YOLO_OpenCV_Segment,
},
'OpenVINO':{
'Classify':backends.OpenVINO.YOLO_OpenVINO_Classify,
'Detect':backends.OpenVINO.YOLO_OpenVINO_Detect,
'Segment':backends.OpenVINO.YOLO_OpenVINO_Segment,
},
'TensorRT':{
'Classify':backends.TensorRT.YOLO_TensorRT_Classify,
'Detect':backends.TensorRT.YOLO_TensorRT_Detect,
'Segment':backends.TensorRT.YOLO_TensorRT_Segment,
},
}
def infer(self, input_path:str, output_path:str, show_result:bool, save_result:bool) -> None:
assert os.path.exists(input_path), 'input not exists!'
if input_path.endswith('.bmp') or input_path.endswith('.jpg') or input_path.endswith('.png'):
self.image = cv2.imread(input_path)
self.pre_process()
self.process()
self.post_process()
if save_result and output_path!='':
cv2.imwrite(output_path, self.result)
if show_result:
cv2.imshow('result', self.result)
cv2.waitKey(0)
elif input_path.endswith('.mp4'):
cap = cv2.VideoCapture(input_path)
start = time.time()
if save_result and output_path!='':
fourcc = cv2.VideoWriter_fourcc(*'XVID')
wri = cv2.VideoWriter(output_path, fourcc, 30.0, (1280,720))
while True:
ret, self.image = cap.read()
if not ret:
break
self.result = self.image.copy()
self.pre_process()
self.process()
self.post_process()
if show_result:
cv2.imshow('result', self.result)
cv2.waitKey(1)
if save_result and output_path!='':
wri.write(self.result)
end = time.time()
print((end-start)*1000, 'ms')
即通过task_map接口返回具体算法类的实现。其同级的__init__.py文件内容如下:
from backends import ONNXRuntime, OpenCV, OpenVINO, TensorRT
__all__ = 'ONNXRuntime', 'OpenCV', 'OpenVINO', 'TensorRT'
用来初始化ONNXRuntime,OpenCV,OpenVINO,TensorRT四个package。ONNXRuntime文件夹下的yolo_onnxruntime.py内容为:
import onnxruntime
from backends.yolo import *
from backends.utils import *
class YOLO_ONNXRuntime(YOLO):
def __init__(self, algo_type:str, device_type:str, model_type:str, model_path:str) -> None:
super().__init__()
assert os.path.exists(model_path), "model not exists!"
if device_type == 'CPU':
self.onnx_session = onnxruntime.InferenceSession(model_path, providers=['CPUExecutionProvider'])
elif device_type == 'GPU':
self.onnx_session = onnxruntime.InferenceSession(model_path, providers=['CUDAExecutionProvider'])
self.algo_type = algo_type
self.model_type = model_type
self.input_name = []
for node in self.onnx_session.get_inputs():
self.input_name.append(node.name)
self.output_name = []
for node in self.onnx_session.get_outputs():
self.output_name.append(node.name)
self.input = {}
def process(self) -> None:
self.output = self.onnx_session.run(None, self.input)
class YOLO_ONNXRuntime_Classify(YOLO_ONNXRuntime):
def pre_process(self) -> None:
if self.algo_type == 'YOLOv5':
crop_size = min(self.image.shape[0], self.image.shape[1])
left = (self.image.shape[1] - crop_size) // 2
top = (self.image.shape[0] - crop_size) // 2
crop_image = self.image[top:(top+crop_size), left:(left+crop_size), ...]
input = cv2.resize(crop_image, self.input_shape)
input = input / 255.0
input = input - np.array([0.406, 0.456, 0.485])
input = input / np.array([0.225, 0.224, 0.229])
if self.algo_type == 'YOLOv8':
self.input_shape = (224, 224)
if self.image.shape[1] > self.image.shape[0]:
self.image = cv2.resize(self.image, (self.input_shape[0]*self.image.shape[1]//self.image.shape[0], self.input_shape[0]))
else:
self.image = cv2.resize(self.image, (self.input_shape[1], self.input_shape[1]*self.image.shape[0]//self.image.shape[1]))
crop_size = min(self.image.shape[0], self.image.shape[1])
left = (self.image.shape[1] - crop_size) // 2
top = (self.image.shape[0] - crop_size) // 2
crop_image = self.image[top:(top+crop_size), left:(left+crop_size), ...]
input = cv2.resize(crop_image, self.input_shape)
input = input / 255.0
input = input[:, :, ::-1].transpose(2, 0, 1) #BGR2RGB和HWC2CHW
if self.model_type == 'FP32' or self.model_type == 'INT8':
input = np.expand_dims(input, axis=0).astype(dtype=np.float32)
elif self.model_type == 'FP16':
input = np.expand_dims(input, axis=0).astype(dtype=np.float16)
for name in self.input_name:
self.input[name] = input
def post_process(self) -> None:
output = np.squeeze(self.output).astype(dtype=np.float32)
if self.algo_type == 'YOLOv5':
print("class:", np.argmax(output), " scores:", np.exp(np.max(output))/np.sum(np.exp(output)))
if self.algo_type == 'YOLOv8':
print("class:", np.argmax(output), " scores:", np.max(output))
class YOLO_ONNXRuntime_Detect(YOLO_ONNXRuntime):
def pre_process(self) -> None:
input = letterbox(self.image, self.input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1) #BGR2RGB和HWC2CHW
input = input / 255.0
if self.model_type == 'FP32' or self.model_type == 'INT8':
input = np.expand_dims(input, axis=0).astype(dtype=np.float32)
elif self.model_type == 'FP16':
input = np.expand_dims(input, axis=0).astype(dtype=np.float16)
for name in self.input_name:
self.input[name] = input
def post_process(self) -> None:
output = np.squeeze(self.output[0]).astype(dtype=np.float32)
boxes = []
scores = []
class_ids = []
if self.algo_type == 'YOLOv5':
output = output[output[..., 4] > self.confidence_threshold]
classes_scores = output[..., 5:85]
for i in range(output.shape[0]):
class_id = np.argmax(classes_scores[i])
obj_score = output[i][4]
cls_score = classes_scores[i][class_id]
output[i][4] = obj_score * cls_score
output[i][5] = class_id
if output[i][4] > self.score_threshold:
boxes.append(output[i][:6])
scores.append(output[i][4])
class_ids.append(output[i][5])
output[i][5:] *= obj_score
if self.algo_type == 'YOLOv8':
for i in range(output.shape[0]):
classes_scores = output[..., 4:]
class_id = np.argmax(classes_scores[i])
output[i][4] = classes_scores[i][class_id]
output[i][5] = class_id
if output[i][4] > self.score_threshold:
boxes.append(output[i, :6])
scores.append(output[i][4])
class_ids.append(output[i][5])
boxes = np.array(boxes)
boxes = xywh2xyxy(boxes)
scores = np.array(scores)
indices = nms(boxes, scores, self.score_threshold, self.nms_threshold)
boxes = boxes[indices]
self.result = draw(self.image, boxes)
class YOLO_ONNXRuntime_Segment(YOLO_ONNXRuntime):
def pre_process(self) -> None:
input = letterbox(self.image, self.input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1) #BGR2RGB和HWC2CHW
input = input / 255.0
if self.model_type == 'FP32' or self.model_type == 'INT8':
input = np.expand_dims(input, axis=0).astype(dtype=np.float32)
elif self.model_type == 'FP16':
input = np.expand_dims(input, axis=0).astype(dtype=np.float16)
for name in self.input_name:
self.input[name] = input
def post_process(self) -> None:
output = np.squeeze(self.output[0]).astype(dtype=np.float32)
boxes = []
scores = []
class_ids = []
preds = []
if self.algo_type == 'YOLOv5':
output = output[output[..., 4] > self.confidence_threshold]
classes_scores = output[..., 5:85]
for i in range(output.shape[0]):
class_id = np.argmax(classes_scores[i])
obj_score = output[i][4]
cls_score = classes_scores[i][class_id]
output[i][4] = obj_score * cls_score
output[i][5] = class_id
if output[i][4] > self.score_threshold:
boxes.append(output[i][:6])
scores.append(output[i][4])
class_ids.append(output[i][5])
output[i][5:] *= obj_score
preds.append(output[i])
if self.algo_type == 'YOLOv8':
for i in range(output.shape[0]):
classes_scores = output[..., 4:84]
class_id = np.argmax(classes_scores[i])
output[i][4] = classes_scores[i][class_id]
output[i][5] = class_id
if output[i][4] > self.score_threshold:
boxes.append(output[i, :6])
scores.append(output[i][4])
class_ids.append(output[i][5])
preds.append(output[i])
boxes = np.array(boxes)
boxes = xywh2xyxy(boxes)
scores = np.array(scores)
indices = nms(boxes, scores, self.score_threshold, self.nms_threshold)
boxes = boxes[indices]
masks_in = np.array(preds)[indices][..., -32:]
proto= np.squeeze(self.output[1]).astype(dtype=np.float32)
c, mh, mw = proto.shape
masks = (1/ (1 + np.exp(-masks_in @ proto.reshape(c, -1)))).reshape(-1, mh, mw)
downsampled_bboxes = boxes.copy()
downsampled_bboxes[:, 0] *= mw / self.input_shape[0]
downsampled_bboxes[:, 2] *= mw / self.input_shape[0]
downsampled_bboxes[:, 3] *= mh / self.input_shape[1]
downsampled_bboxes[:, 1] *= mh / self.input_shape[1]
masks = crop_mask(masks, downsampled_bboxes)
self.result = draw(self.image, boxes, masks)
init.py文件内容为:
from backends.ONNXRuntime.yolo_onnxruntime import YOLO_ONNXRuntime_Classify, YOLO_ONNXRuntime_Detect, YOLO_ONNXRuntime_Segment
__all__ = "YOLO_ONNXRuntime_Classify", "YOLO_ONNXRuntime_Detect", "YOLO_ONNXRuntime_Segment",
来初始化具体算法实现子类。
















 328
328











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











