




 本文介绍如何通过查看设备上的nv_tegra_release文件来确定Jetson设备的JetPack版本。具体步骤包括使用cat命令读取文件,并从输出中获取版本信息,然后对照NVIDIA官方文档找到对应的JetPack版本。
本文介绍如何通过查看设备上的nv_tegra_release文件来确定Jetson设备的JetPack版本。具体步骤包括使用cat命令读取文件,并从输出中获取版本信息,然后对照NVIDIA官方文档找到对应的JetPack版本。
命令:
cat /etc/nv_tegra_release
如下图所示,

输入的内容为
# R32 (release), REVISION: 5.1, GCID: 26202423, BOARD: t210ref, EABI: aarch64, DATE: Fri Feb 19 16:45:52 UTC 2021
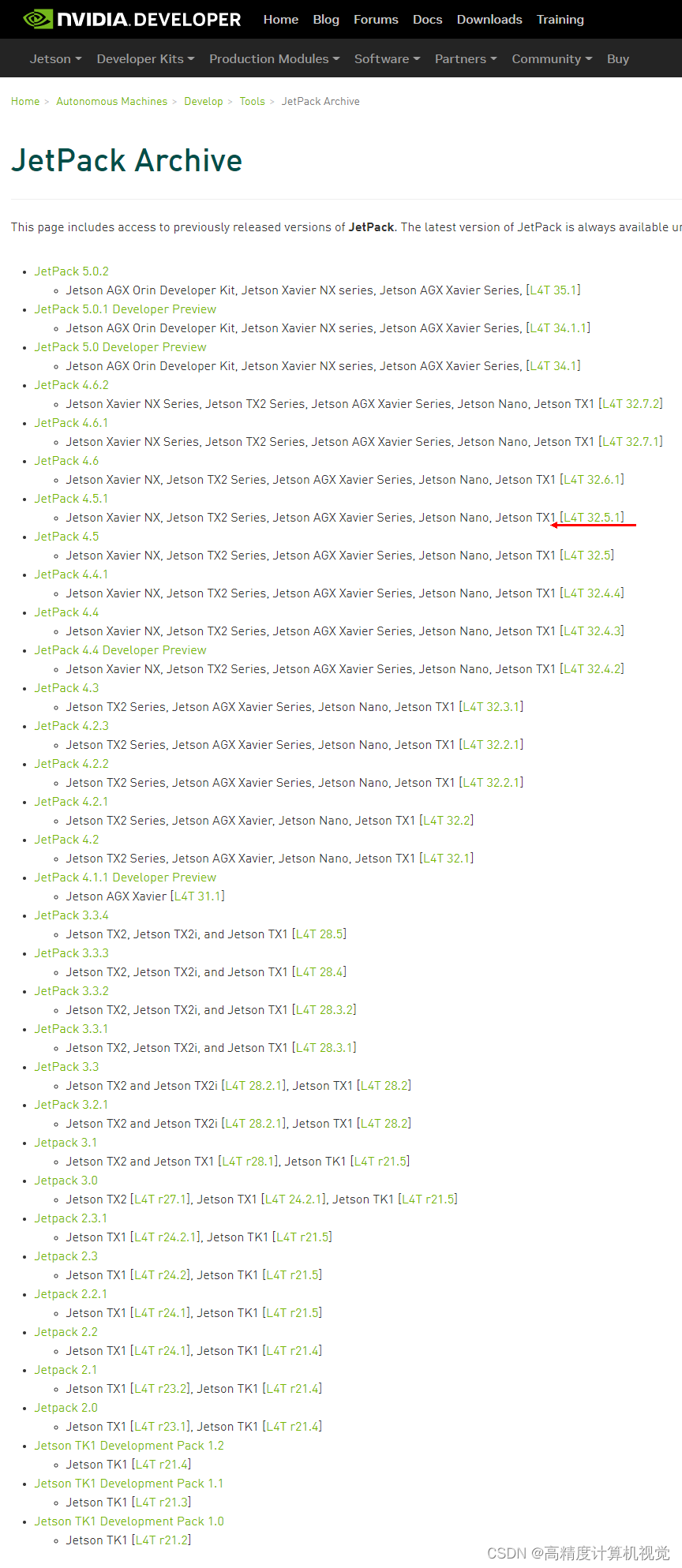
这里R32 (release), REVISION: 5.1就是我们要的版本信息,然后到官网,
JetPack Archive | NVIDIA Developer
找到相应的版本,例如,这里找到的其中L4T 32.5.1对应的版本,就是JetPack4.5.1,也就是
- JetPack 4.5.1
- Jetson Xavier NX, Jetson TX2 Series, Jetson AGX Xavier Series, Jetson Nano, Jetson TX1 [L4T 32.5.1]
如下图所示,

















 3581
3581

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









