







摄像机标定过程
为了进行摄像机标定,必须已知世界坐标系中足够多三维空间点的坐标,找到这些点在图像中的投影的二维图像坐标,并建立对应关系。
平面标定板的几大优势:非常易于操作;可以制作的非常精确;可以方便用在背光照明的应用上,只需要使用透明材料制作放置标志点的底盘即可。
将标定标记在世界坐标系中的坐标记为
Mi
,将标定标记中心点投影到图像坐标系的坐标记为
mi
,将摄像机参数表示为c,c包含了摄像机的内参和外参(eg.针孔摄像机模型中,
c=(f,k,sx,sy,cx,cy,α,β,γ,tx,ty,tz)
。这里必须注意的是外参对应的世界坐标系是在标定板上,例如坐标原点在标定板最中心的标定标记的中心,坐标系的
x
轴和
d(c)=∑i=1k||mi−π(Mi,c)||2−>min
式中, k=mn 是标定板上标定标记的数量,这个问题是一个非常复杂的非线性最优化问题。因此,需要为这些参数提供更好的初始值,摄像机内参的初始值可以在图像传感器以及说明中得到。摄像机外参的初始值一般很难得到。
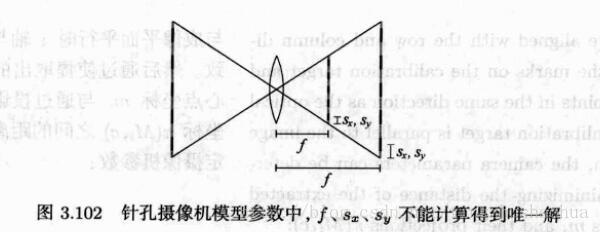
然而,这个优化过程并不能得到所有摄像机参数,因为我们选择的摄像机模型的待解参数过多:

为了解决这个上述简并性(degener-acies)问题,摄像机必须使用多幅图像进行标定,在这些图像中标定板的位置要求不同,这样才能避免上述问题发生。例如,对针孔摄像机而言标定对象不能在所有拍摄的标定对象中均互相平行。而对于远心摄像机来说,为了解决以上问题,标定板必须绕所有轴旋转。假设我们使用
l
幅图像进行标定,那么就必须求得
d(c)=∑j=1l∑i=1k||mi,j−π(Mi,c)||2−>min
式中, mi,j 表示在第 j <script type="math/tex" id="MathJax-Element-166">j</script>幅标定图像中的第i个标定标记的坐标,如果在图像中标定板放置的位置和方向合适的话,就可以求得所有摄像机参数的唯一解。 为了使求得的摄像机参数准确度更高,所有图像中标定板的位置应该能覆盖图像的四个角,这主要是因为角落处的镜头畸变最大,这样就可以得到径向畸变系数k最准确的值。
















 4582
4582











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











