







本文主要介绍了Shi-Tomasi特征点(角点)检测及追踪方法,这个方法是KLT方法的一种改进,其在检测特征点(角点)方法同KLT并没有什么不同,都通过比较梯度矩阵的最小特征值来确定特征点的,而主要的不同是在,匹配特征点时,其引入了仿射变换,让特征点在帧间匹配更为精确,并排除不好的特征点。另外还简要介绍了在估计图像运动向量的迭代方法—牛顿-拉夫逊方法或牛顿迭代法(Newton-Raphson method)。
一、牛顿-拉夫逊方法或牛顿迭代法(Newton-Raphson method)
本人前面在KLT角点检测方法里提到了可以通过迭代的方式,不断的应用新的位移向量d值,而图像块每次迭代都可以采用双线性插值(获得子像素精确度)得到新位置。那么这个迭代方法就是牛顿-拉夫逊方法Newton-Raphson。
下面是百度百科里的介绍:

二、Shi-Tomasi方法
图像匹配问题一般都通过图像之间相关性或者平方误差和等方法,如果是非常小的帧间移动,一个窗口可以通过优化一些匹配标准、或通过线性图像变形、或自适应窗口大小这些方法达到匹配最优。而特征窗口选择问题,可以通过一些基于纹理或角度(如高阶梯度,拉氏变换过零点,角点等)的方法来考虑,无论KLT还是Shi-Tomasi都是基于这样的考虑的。
Shi-Tomasi方法认为纯粹的平移对于图像运动来说,并不是适当的模型,而仿射变换(包含了线性变形及平移)却可以。然后提出了一种通过牛顿-拉夫逊方法Newton-Raphson来估计图像仿射变换的方法,但是其并没有用仿射运动来估计图像运动向量,而是使用了同KLT一致的平移运动来估计块的运动,因为实际上如果帧间运动比较小的情况下,平移比仿射运动估计效果更好。
随着图像帧的推进,图像强度改变模式会一种复杂的方式变化,我们可以简单地将图像运动视为如下公式:

这个运动为像素点的平移向量

其中D是一个变形矩阵,而d是特征窗口中心的平移向量,而在第一帧的像素点x移动到第二帧的Ax+d位置,这里A=I+D,即

那么接下来,我们需要估计D与d里共6个参数,而这个估计的质量依赖于窗口的大小、窗口内的纹理程度、帧间的运动。如果窗口太小,那么D将会很难估计,因为小的窗口内估计运动数目太小,所有估计并不可靠,而窗口小却更适合跟踪,因为减少跟踪后图像的不连续性。所以来说,纯粹的平移在跟踪过程中更好。
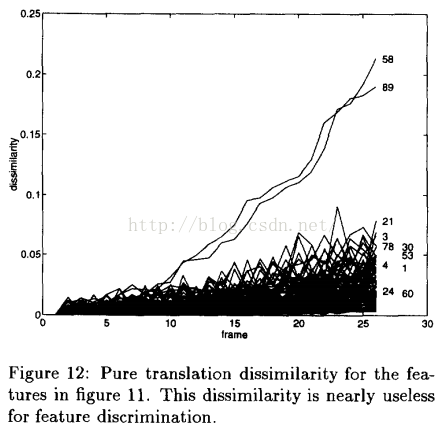
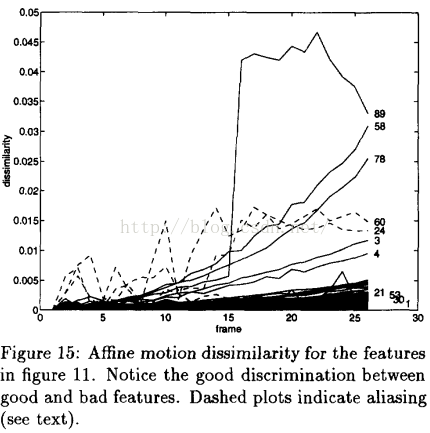
文章内的实验表明:这两个运动模型的最好结合是纯粹平移作为跟踪,而仿射运动作为比较特征匹配质量。
虽然我们没办法让运动估计完美,但我们可以使估计后不相似程度最小,即使以下公式最小:

仍然有泰勒近似为:

不过同KLT方法里纯粹的平移不同的是,这里的g拥有6个参数

而平移变换为如下:
T与a的值我们也是可以求出来的,然后就能估计Z的值,这里我们仍然可以通过牛顿迭代法获得比较精确的值。
在跟踪过程中,我们可以只应用纯粹的平移运动估计(此时D为0),即可以得到运动估计d。这里的Z先前已经得到,而e可以是a的最后两个元素值。

总而言之,这个方法是通过a来确定前后两个帧图像之间的相似性,而通过e来估计图像间的运动
三、总结
Shi-Tomasi选择角点方法同KLT角点检测方法是相同,我也不再多说了,它同KLT方法最关键的不同在于,其对于两帧图像块相似性比较标准不同,其引入了仿射变换,让匹配更为精确,而其在追踪时,仍采用同KLT方法一样,都是通过简单平移来估计图像像素运动的。
两者在追踪图像特征点的比较,可以发现左图不同特征点之间相似度变化线集中在一起,很难分辨出阈值出来,而右图应用了仿射变化的相似度衡量,可以清楚的检测出一些不好的特征点。
四、参考文献
Good Features to Track 【我的上传资源里有这篇文献】

















 603
603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









