






目标检测:更关注语义层面
目标分割:关注像素级别的
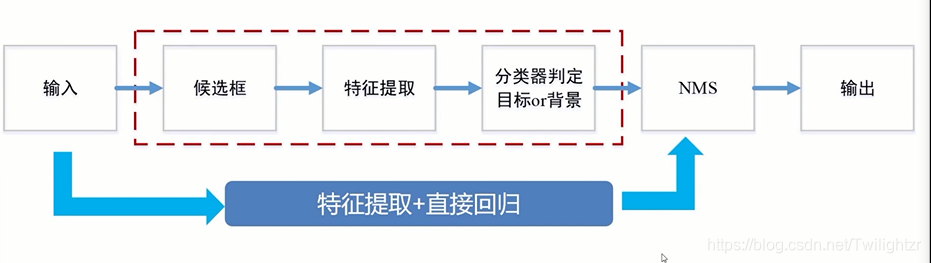
目标检测算法基本流程

DPM:会加额外的策略,传统算法的巅峰之作
深度学习目标检测方法:
One-stage(YOLO SSD)
Two-stage(Faster RCNN)
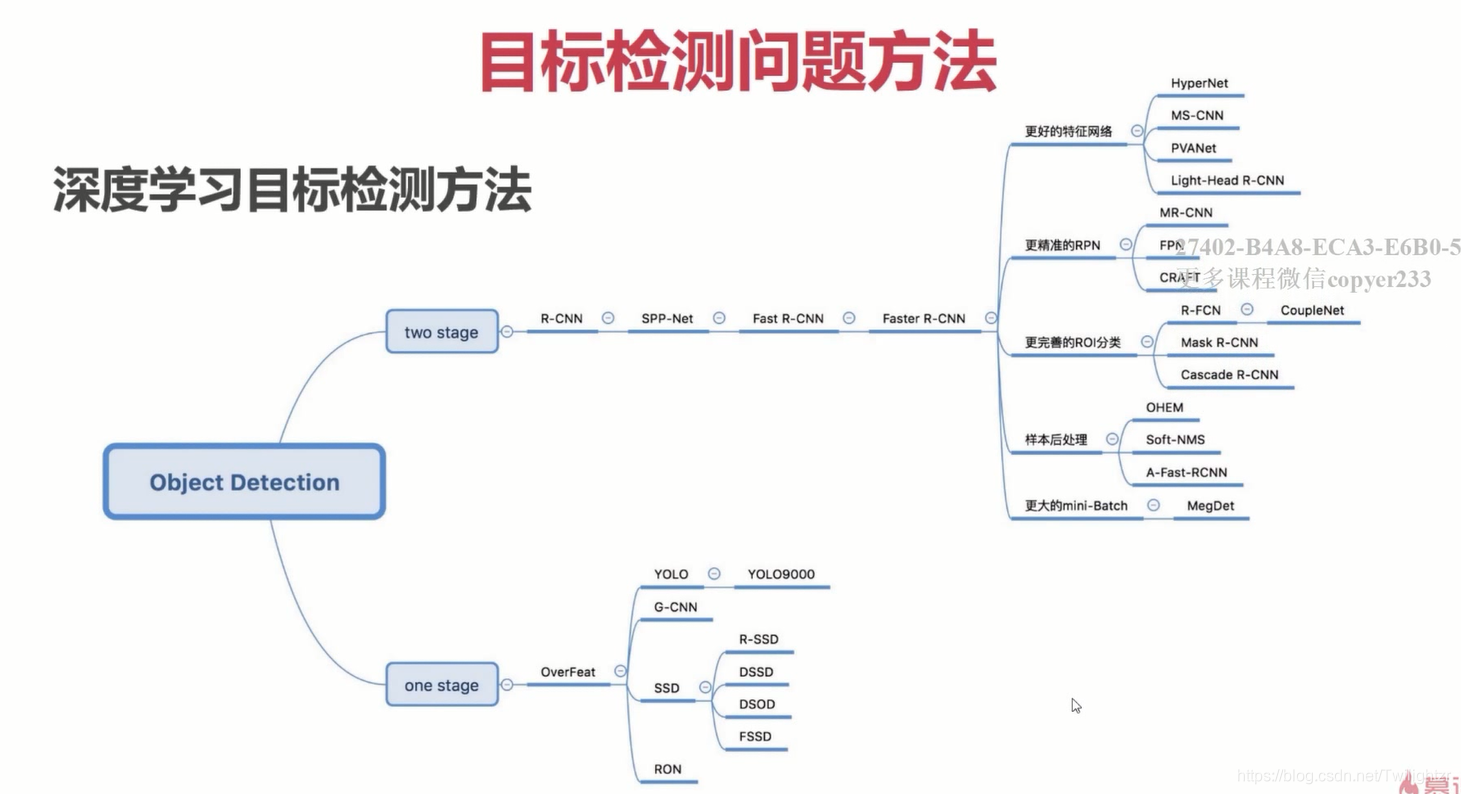
目前深度学习目标检测方法是主流
通过学习方法获取特征,特征会更加鲁棒
Proposal或者直接回归 获取目标
在进行目标判定的时候,通过深度网络
特征的不鲁棒,
端到端,端到端的步骤比传统目标检测算法的多步骤更加方便去适应模型
传统目标检测方法基本流程
多分类:区分背景
对候选框判定后
NMS:非极大抑制:对候选框合并
深度学习目标
将特征提取的过程变成卷积神经网
Viola-Jones(人脸检测)
haar特征:
候选框:滑动窗口提取
HOG+SVM
用于行人检测(行人姿态存在差异,且为运动)
提取HOG特征
HOG特征(
纹理特征的一种
对特征进行灰度化(Hog主要用于灰度图上(
进行Gamma变换
计算梯度map(当前像素点的方向角:量化到0——360
维度:量化角度,程度,CELL,
训练SVM分类器
对行人和背景进行建模
支持向量
候选目标提取;
候选框过滤:SVM
DPM:传统目标检测算法的巅峰之作
HOG的扩展
利用SVM训练得到物体的梯度
NMS:
目的:为了消除多余的框,找到最佳的物体检测的位置
思想:选取那些领域里分数最高的窗口,同时抑制那些分数低的窗口
(分数:概率值)
Soft-NMS:直接待用阈值对检测框的判定太多粗略。因此soft
对相邻区域内的检测狂的分数进行调整儿非彻底抑制,从而提高了高检测率情况下的准确率。
在低检索率时仍能对物体检测性能有明显提升。
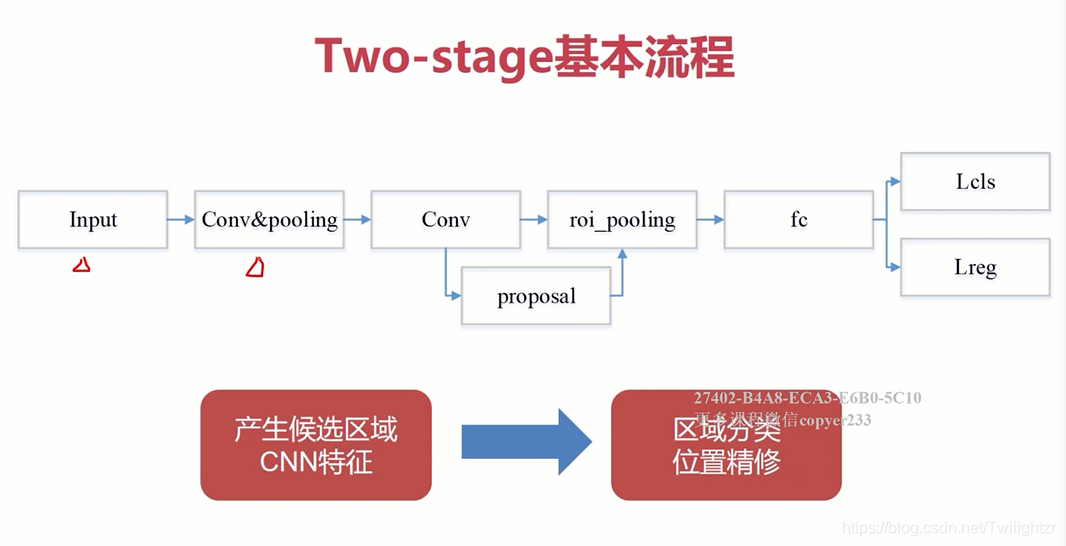
ROI_POOLINT:抠图
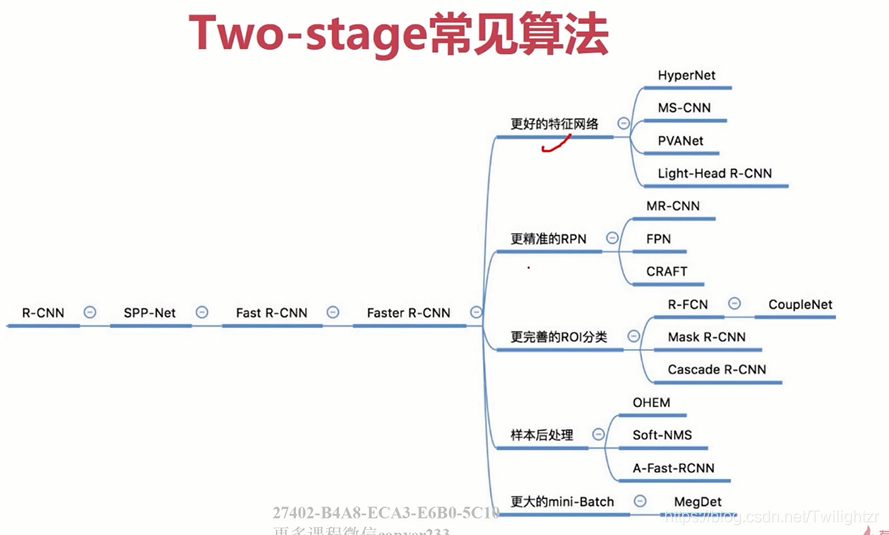
Two-stage:
RCNN
Fast RCNN
Faster RCNN
Faster RCNN变种














 305
305











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









