






前面的文章关注的是方阵的逆矩阵,
Ax=b
有一个解的话它就是
x=A−1b
,它可以通过消元法得到。一个长方形矩阵带来的新的可能性——
U
可能没有所有的主元,本文我们就将
对于一个可逆矩阵,零空间只包含 x=0 ,列空间就是整个空间,当零空间不仅仅包含零向量而(或)列空间没有包含所有向量时新的问题出现了:
- 零空间里的任意向量
xn
可以加到一个特解
xp
上,所有线性方程解的形式为
x=xp+xn
:
Axp=bAxn=0得到A(xp+xn)=b - 当列空间不包含
Rm
里的所有
b
时,我们需要对
b 添加限制使得 Ax=b 有解。
接下来我们举一个
3×4
的例子,将计算
Ax=0
的所有解,找出
b
位于列空间(这样的话
- 0x=b 除了 b=0 外无解, 1×1 矩阵的列空间只包含 b=0 。
-
0x=0
有无限多个解,零空间包含所有的
x
,一个个特解是
xp=0 ,完整解是 x=xp+xn=x+(any x)
同样的现在开始考虑
2×2
的例子,对于第一行为1,第二行为2的矩阵是不可逆的:
y+z=b1,2y+2z=b2
通常没有解。
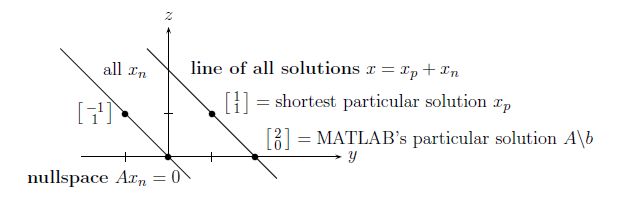
图1
除了
b2=2b1
外没有其他解,
A
的列空间只包含两元素比值为2的
梯度形U和行最简形R
我们从
3×4
矩阵开始,首先得到
U
进步一得到
主元
a11=1
非零,通常的初等变换将使这个主元下面的元素变为零,而坏消息出现在第二列:
第二个候选主元是零:我们不接受这种主元。我们试图找出它下面是否存在非零元素,从而通过交换即可,不幸的是下面都是零。如果
A
是方阵,那么这个信号告诉我们矩阵时奇异的,而对于长方形矩阵,还没有结束,接下来我们能做的就是继续看下一列,发现主元是3,从第三行减去第二行的两倍就得到了
严格来讲,我们接下来该处理第四列,因为第三个主元位置是零所以就不需要的。
U
是上三角矩阵但是它的主元不在对角线上,
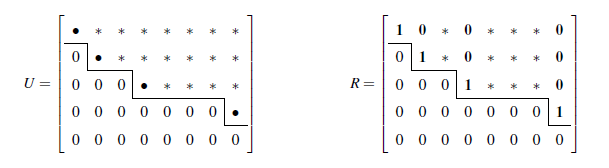
图2
对任何矩阵我们都可以得到这种阶梯形式 U :
- 主元是每行第一个非零元素。
- 每个主元所在列的下面都是零。
- 每行的主元位于上面那行主元的右边,这样产生阶梯形式并且零行在最后。
因为我们从
注意
L
是方阵,它和
一般情况下都需要置换操作,而我们的例子不需要用置换矩阵
P
进行行变换,因为当主元不存在时,我们就进入下一列,不需要假设
2、对于任意
m×n
矩阵
A
,存在一个置换矩阵
现在我们比
U
更深入一点讨论行最简形
矩阵
R
是
那么可逆方阵的行最简阶梯型是什么样的呢?答案是单位矩阵。他们有完整的主元集合且都为1,主元上下又都为零,所以 A 可逆的情况下为单位矩阵。
对于
主元变量和自由变量
我们的目标是求出
Rx=0
的所有解,主元是至关重要的:
未知量 u,v,w,y 分成了两组,一组包含主元变量,他们对应主元所在的列,第一和第三列包含主元,所以 u,w 是主元变量;另一组组成自由变量,对应于没有主元的列,他们是第二和第四列,所以 v,y 是自由变量。
为了求出
Rx=0
的通解,我们可能给自由变量分配任意值,假设我们已经分配了
v,y
值,那么主元变量就完全可以用
v,y
的形式确定:
完整解可以表示成这两个特殊解的组合:
再次观察一下这个完整结,特殊解 (−3,1,0,0) 有两个自由变量 v=1,y=0 ,另一个特解 (1,0,−1,1) 为 v=0,y=1 。所有解是这两个解的线性组合,求 Ax=0 解的最好方式是找出特解:
- 化简为 Rx=0 后,确定主元变量和自由变量
- 将一个自由变量设置为1,另一个设置为0求 Rx=0 ,得到的 x 是一个特解
- 第二步中每一个自由变量都会得到它对应的特解,这些特解的组合形成了零空间也就是
Ax=0 的所有解。
在向量
x
所在的四维空间里,
这里有一个小技巧,使得从
R
中求特解很容易。3,0,-1和1 在
自由变量是1和0,当自由变量移到方程(2)的右边时,他们的系数3,0,-1和1改变了符号,他们确定了特解中的主元变量。
这里给出一个重要的理论。假设矩阵列数比行数大
n>m
,因为
m
行最多有
3、如果
肯定有无限多个解,因为任何常数
c
都能满足
中心思想(子空间的维数)在下一篇文章里会精确给出,为了零空间我们处理自由变量,为了列空间我们处理变量。
解Ax=b,Ux=c,Rx=d
b≠0
的情况不同于
b=0
,
A
上的行运算也必须在右边
对于最开始的例子,我们令
Ax=b=(b1,b2,b3)
,两边都进行行运算得:
右边执行完前向消去后得到向量 c 。
对等式是否有解还不是很清楚,第三个等式比较麻烦,因为它的左边是零,除非右边
虽然是四个向量,但是他们的组合只是三维空间中的一个平面,列2 是列1的三倍,第四列等于第三列减去第一列,这些相互依赖列如第二和第四列是没有主元的。
列空间
C(A)
可以用两种方式来描述,一方面,它是列1和3产生的平面,其他位于该平面的列不会得出新的列。等价的,它是满足
(b3−2b2+5b1=0
的所有向量
b
组成的平面;如果系统是可解的,这就是约束条件。几何上我们会看到
如果
b
属于列空间,
前向消元在左边得到
U
,右边得到
最后一个方程
0=0
,然后回代:
v,y
是自由变量:
后两项可得出许多解, Ax=b 的每个解是特解和 Ax=0 解的和,方程(4)的特解通过将所有主元变量设为零得到。
几何上,这个解依然是一个二维平面,但是不是子空间,因为它不包含 x=0 ,它平行于我们之前得到的子空间。现在列出求解步骤:
- 将 Ax=b 化为 Ux=c
- 将自由变量设为0,求出 Axp=0,Uxp=c 的一个特解。
- 求出 Ax=0(Ux=0 or Rx=0) 的解,对每一个自由变量轮流等于1即可,那么 x=xp+xn
当方程是 Ax=0 时,特解是零向量!它满足上面的模式,但是 xp=0 没有在(2)中写出来。
问题:化简形式
R
如何让解更加清楚?从我们的例子中可以看出,方程1减去方程2然后方程2除以它的主元。左边得到
我们的特解 xp 的自由变量为 v=y=0 ,忽略掉2和4列,所以立马得到 u=−2,w=1 。
现在我们总结一下,消元揭示了主元变量和自由变量,如果有
r
个主元,那么就有
4、假设消元
完整解是
xp+xn
,一个是所有自由变量为零得特解
xp
,它的主元变量是
d
的
零空间解 xn 是 n−r 个解的组合,每一个自由变量为1。解中的主元变量可以在 R 中对应的列中找到(符号相反)。
我们可以看出秩

















 8904
8904

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









