






原文:http://blog.csdn.net/masibuaa/article/details/8998601
OpenCV中一些相关结构说明:
特征点类:
class KeyPoint
{
Point2f pt; //坐标
float size; //特征点邻域直径
float angle; //特征点的方向,值为[0,360),负值表示不使用
float response; //
int octave; //特征点所在的图像金字塔的组
int class_id; //用于聚类的id
}
存放匹配结果的结构:
struct DMatch
{
//三个构造函数
DMatch(): queryIdx(-1), trainIdx(-1),imgIdx(-1),distance(std::numeric_limits<float>::max()) {}
DMatch(int _queryIdx, int _trainIdx, float _distance ) :
queryIdx( _queryIdx),trainIdx( _trainIdx), imgIdx(-1),distance( _distance) {}
DMatch(int _queryIdx, int _trainIdx, int _imgIdx, float _distance ) :
queryIdx(_queryIdx), trainIdx( _trainIdx), imgIdx( _imgIdx),distance( _distance) {}
intqueryIdx; //此匹配对应的查询图像的特征描述子索引
inttrainIdx; //此匹配对应的训练(模板)图像的特征描述子索引
intimgIdx; //训练图像的索引(若有多个)
float distance; //两个特征向量之间的欧氏距离,越小表明匹配度越高。
booloperator < (const DMatch &m) const;
};
说明:以两个特征点描述子(特征向量)之间的欧氏距离作为特征点匹配的相似度准则,假设特征点对p和q的
特征描述子分别为Desp和Desq,则其欧氏距离定义为:
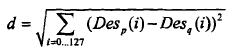
所以每个匹配分别对应训练图像(train)和查询图像(query)中的一个特征描述子(特征向量)。
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include "opencv2/nonfree/features2d.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
int main()
{
initModule_nonfree();//初始化模块,使用SIFT或SURF时用到
Ptr<FeatureDetector> detector = FeatureDetector::create( "SIFT" );//创建SIFT特征检测器
Ptr<DescriptorExtractor> descriptor_extractor = DescriptorExtractor::create( "SIFT" );//创建特征向量生成器
Ptr<DescriptorMatcher> descriptor_matcher = DescriptorMatcher::create( "BruteForce" );//创建特征匹配器
if( detector.empty() || descriptor_extractor.empty() )
cout<<"fail to create detector!";
//读入图像
Mat img1 = imread("desk.jpg");
Mat img2 = imread("desk_glue.jpg");
//特征点检测
double t = getTickCount();//当前滴答数
vector<KeyPoint> keypoints1,keypoints2;
detector->detect( img1, keypoints1 );//检测img1中的SIFT特征点,存储到keypoints1中
detector->detect( img2, keypoints2 );
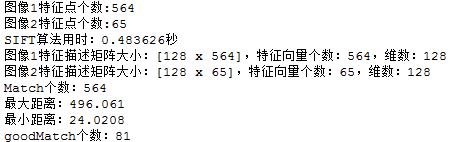
cout<<"图像1特征点个数:"<<keypoints1.size()<<endl;
cout<<"图像2特征点个数:"<<keypoints2.size()<<endl;
//根据特征点计算特征描述子矩阵,即特征向量矩阵
Mat descriptors1,descriptors2;
descriptor_extractor->compute( img1, keypoints1, descriptors1 );
descriptor_extractor->compute( img2, keypoints2, descriptors2 );
t = ((double)getTickCount() - t)/getTickFrequency();
cout<<"SIFT算法用时:"<<t<<"秒"<<endl;
cout<<"图像1特征描述矩阵大小:"<<descriptors1.size()
<<",特征向量个数:"<<descriptors1.rows<<",维数:"<<descriptors1.cols<<endl;
cout<<"图像2特征描述矩阵大小:"<<descriptors2.size()
<<",特征向量个数:"<<descriptors2.rows<<",维数:"<<descriptors2.cols<<endl;
//画出特征点
Mat img_keypoints1,img_keypoints2;
drawKeypoints(img1,keypoints1,img_keypoints1,Scalar::all(-1),0);
drawKeypoints(img2,keypoints2,img_keypoints2,Scalar::all(-1),0);
//imshow("Src1",img_keypoints1);
//imshow("Src2",img_keypoints2);
//特征匹配
vector<DMatch> matches;//匹配结果
descriptor_matcher->match( descriptors1, descriptors2, matches );//匹配两个图像的特征矩阵
cout<<"Match个数:"<<matches.size()<<endl;
//计算匹配结果中距离的最大和最小值
//距离是指两个特征向量间的欧式距离,表明两个特征的差异,值越小表明两个特征点越接近
double max_dist = 0;
double min_dist = 100;
for(int i=0; i<matches.size(); i++)
{
double dist = matches[i].distance;
if(dist < min_dist) min_dist = dist;
if(dist > max_dist) max_dist = dist;
}
cout<<"最大距离:"<<max_dist<<endl;
cout<<"最小距离:"<<min_dist<<endl;
//筛选出较好的匹配点
vector<DMatch> goodMatches;
for(int i=0; i<matches.size(); i++)
{
if(matches[i].distance < 0.31 * max_dist)
{
goodMatches.push_back(matches[i]);
}
}
cout<<"goodMatch个数:"<<goodMatches.size()<<endl;
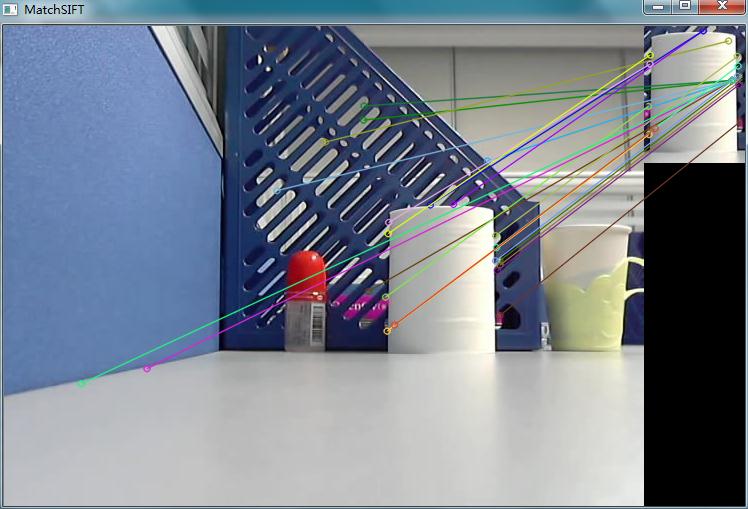
//画出匹配结果
Mat img_matches;
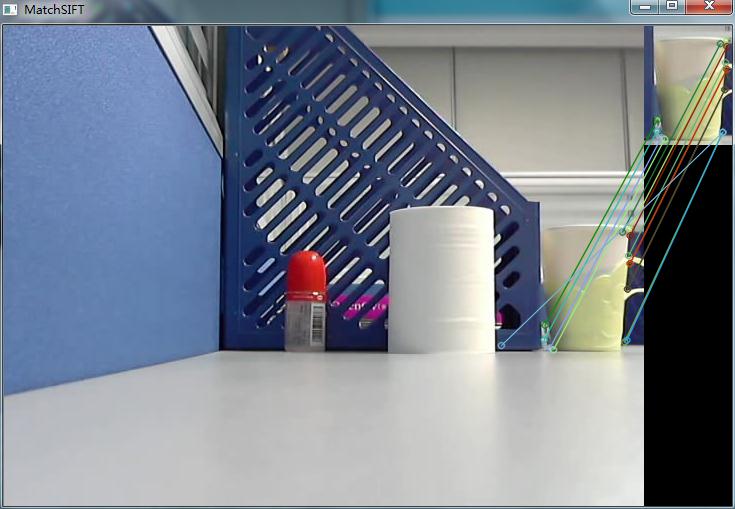
//红色连接的是匹配的特征点对,绿色是未匹配的特征点
drawMatches(img1,keypoints1,img2,keypoints2,goodMatches,img_matches,
Scalar::all(-1)/*CV_RGB(255,0,0)*/,CV_RGB(0,255,0),Mat(),2);
imshow("MatchSIFT",img_matches);
waitKey(0);
return 0;
}
结果:
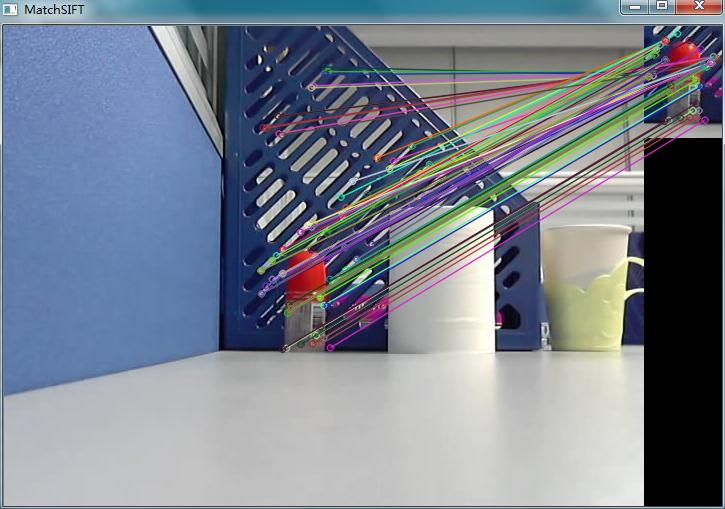
效果图:
源码下载:
http://download.csdn.net/detail/masikkk/5511831
当然,这些匹配还没有经过系统的筛选,还存在大量的错配,关于匹配的筛选参见这篇文章:
以及RobHess的SIFT源码分析系列文章:http://blog.csdn.net/masibuaa/article/details/9191309















 1299
1299

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









