







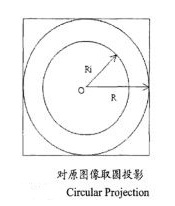
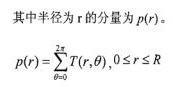
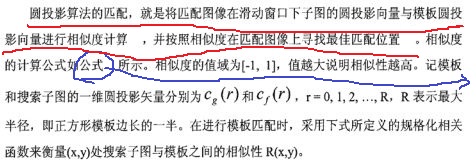
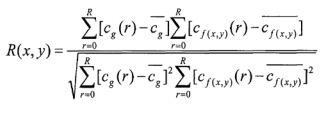
解决模板图和基准图之间存在任意角度旋转的景象匹配问题的关键是找到一个旋转不变量, 圆投影匹配算法就是利用“圆”的各向同性和投影特征提出来的。传统的图像匹配算法,如归一化交叉互相关算法,主要利用像素点与像素点之间的相关性计算匹配图像与模板之间的相关度。这种方法在匹配图像与模板之间存在一定选择角度的时候,正确率会随着旋转角度的增加而迅速下降。当旋转角度大于5度的时候就会完全失效。于是圆投影算法被提出。


应用到实际中基于圆投影矢量和的旋转不变量检测(点击进入查看文献)
上面基于圆投影矢量和的模板匹配文献算法实现代码如下:
//圆投影
void Cir 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 9620
9620

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









