







常用的双目匹配算法主要分为基于滑动窗口和能量传播的算法,当然最近几年,基于深度学习的匹配算法快速发展,并快速占据了各大擂台的榜首位置。 双目匹配的核心思想在于通过暴力搜索方法找到同一基线方向上的左右图的相似点。如何构建算法权衡相似点度量的又准又鲁棒,是双目匹配一直在研究的内容。(文末附个彩蛋) (* ̄︶ ̄)
1、匹配算法的原理



2、匹配算法的评估

3、稀疏视差和稠密视差图的对比
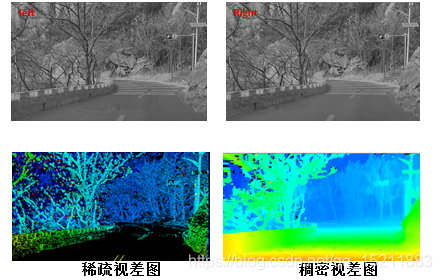
稀疏视差:
常用的匹配算法有:SAD,Census,ADCensus,巴拉巴拉
算法特点:
- 算法简单:和稠密匹配算法比较,计算量至少少一倍以上。
- 易于硬件实现:实时性要求很高,需要在FPGA上进行操作,硬件计算资源寸土寸金,方便在中低端FPGA上实现。
- 鲁棒性较高:最终只保留物体边缘处的视差,物体边缘的特征明显,视差的稳定性便会很强。
- 视差图稀疏:当然,视差稀疏,梯度平缓的地方没有视差,有效信息少。
稠密视差:
常用的匹配算法:SGM,图割,深度学习,巴拉巴拉
算法特点:
- 有效信息多:稠密,自然信息就丰富。
- 计算量大:上述方法中计算量最小的可能就是SGM算法了。
- 硬件资源消耗大:其中,SGM算法框架更适合在FPGA上实施。至于那些以KITTI数据训练的深度算法还有很长的路要走。
- 更易受光照影响:一点光照变化,可能就会引起图像纹理的变化,导致局部视差出现错误或者偏差。
综上,稀疏和稠密视差各有优劣,根据自己的应用场景选择技术方案。
大彩蛋:双目视觉相关网站
http://szeliski.org
http://vision.middlebury.edu
http://www.debevec.org
http://www.vision.deis.unibo.it
http://www.robots.ox.ac.uk
http://cvlab.epfl.ch
http://vision.cs.brown.edu
http://grail.cs.washington.edu
http://graphics.stanford.edu
http://meshlab.sourceforge.net
http://www.cvlibs.net















 999
999











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









