







在另一篇文章中我已经写过有关普通相机模型及其OpenCV标定实现,这篇文章将主要关注鱼眼相机模型及其OpenCV标定实现。
先看一张鱼眼相机拍摄出来的结果:
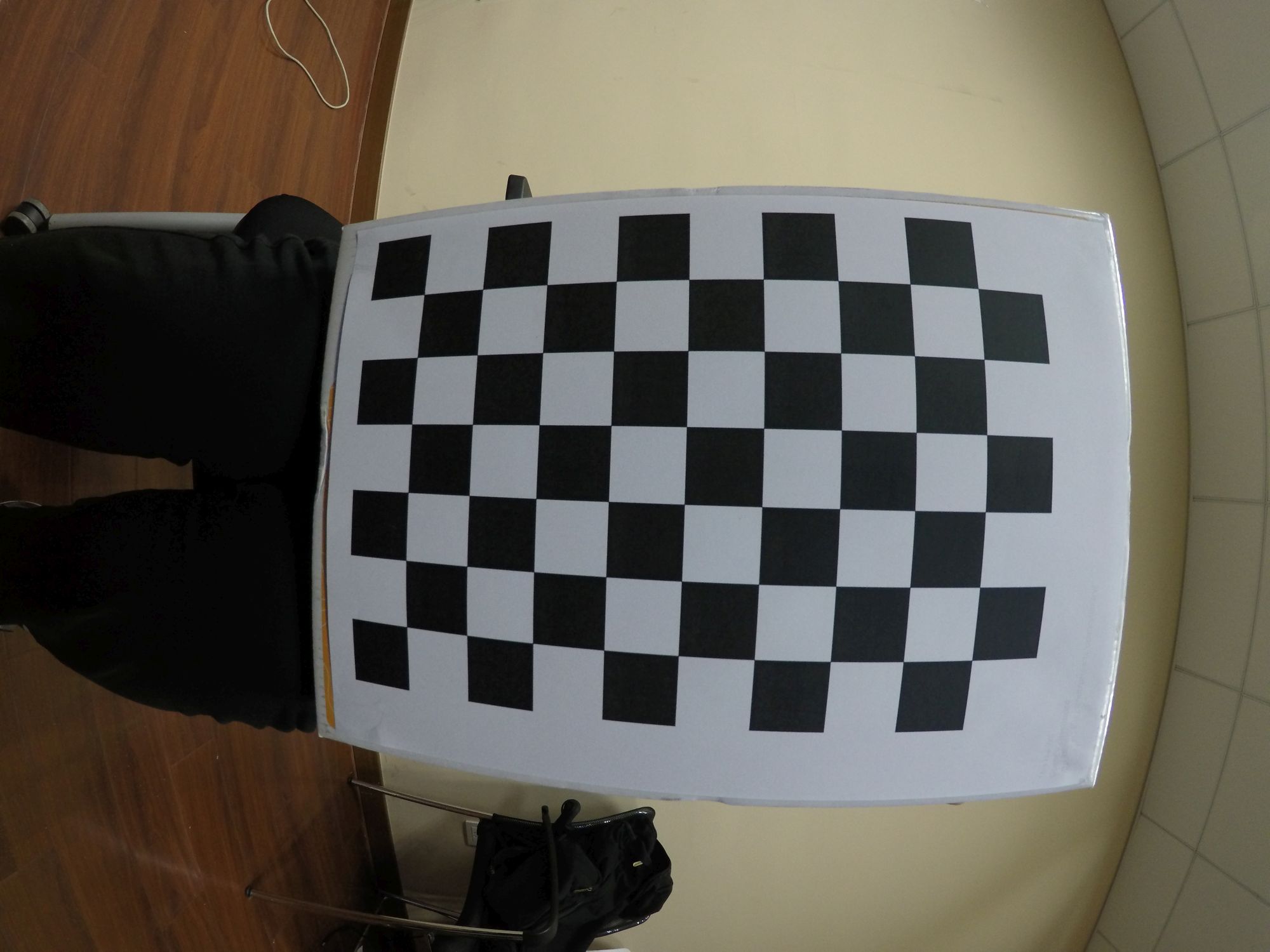
从图中可以看出很明显的畸变。对鱼眼相机标定,有时候也可以用普通相机的标定方法对其进行标定,但是却不能保证去畸变后的效果是最好的。因此对于Gopro等鱼眼镜头拍摄出来的图像去畸变,最好的方法就是采用鱼眼相机标定方法进行标定。
鱼眼相机模型
鱼眼相机的内参模型依然可以表示为:
⎧⎩⎨⎪⎪fx000fy0cxcy1⎫⎭⎬⎪⎪
这与普通镜头的成像模型没有区别。两者之间的区别主要体现在畸变系数,鱼眼相机的畸变系数为{ k1,k2,k3
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4678
4678











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









