







 这篇博客详细记录了在Windows10环境下,使用Visual Studio 2013配置PCL1.8开发环境的全过程,包括下载安装PCL,配置系统变量,设置项目工程属性,以及测试验证环境是否配置成功。过程中提到了一些关键的库文件和依赖项,供读者参考。
这篇博客详细记录了在Windows10环境下,使用Visual Studio 2013配置PCL1.8开发环境的全过程,包括下载安装PCL,配置系统变量,设置项目工程属性,以及测试验证环境是否配置成功。过程中提到了一些关键的库文件和依赖项,供读者参考。
Windows10下VS2013+PCL1.8环境配置
刚换了机子配PCL,Windows下配环境实在是太蛋疼了,上次没有记录配置的过程,所以又得各种搜教程,关键是很多博客上写的教程都不对啊!!!不知道写出一个不对的配置方法给人看是怎样的一种心态。。这次一定要详细记下来:
配置过程
下载安装PCL
下载PCL-1.8.0-AllInOne-msvc2013-win64并安装,一直下一步就好。注意:中途会弹出安装OpenNI的框,我们将OpenNI安装在PCL安装目录下3rdParty\OpenNI2里。
下载链接:http://pan.baidu.com/s/1hrAhLK4 密码:1evw配置系统变量:
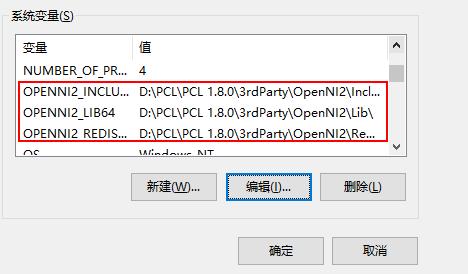
安装好后,会自动出现如下几个变量:
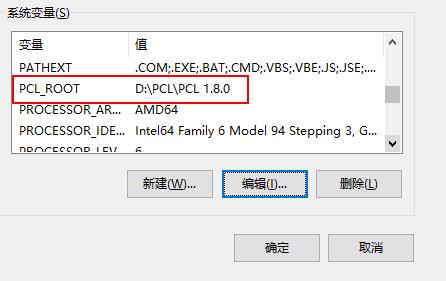
接着,我们需要自己添加如下几个变量:
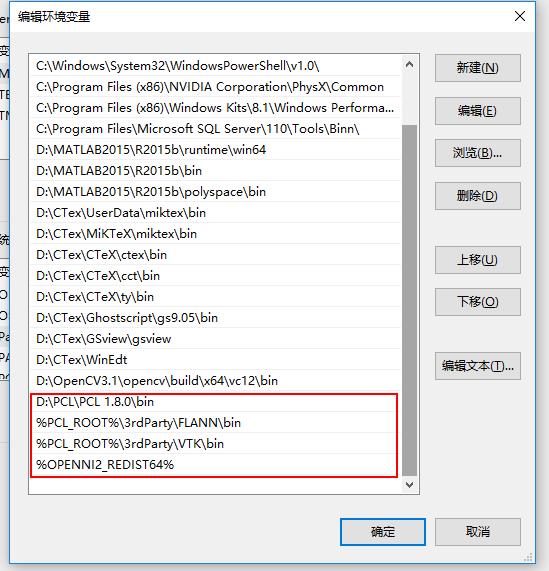
首先是path,第一个是安装完自己加的,我们需要手动添加其他三个:
配置项目工程属性文件
(1)新建一个空项目,将项目设置成64位,这个没什么好说的。
(2)切换属性管理器,在Debug|64下添加新项目属性表,取名PCL。
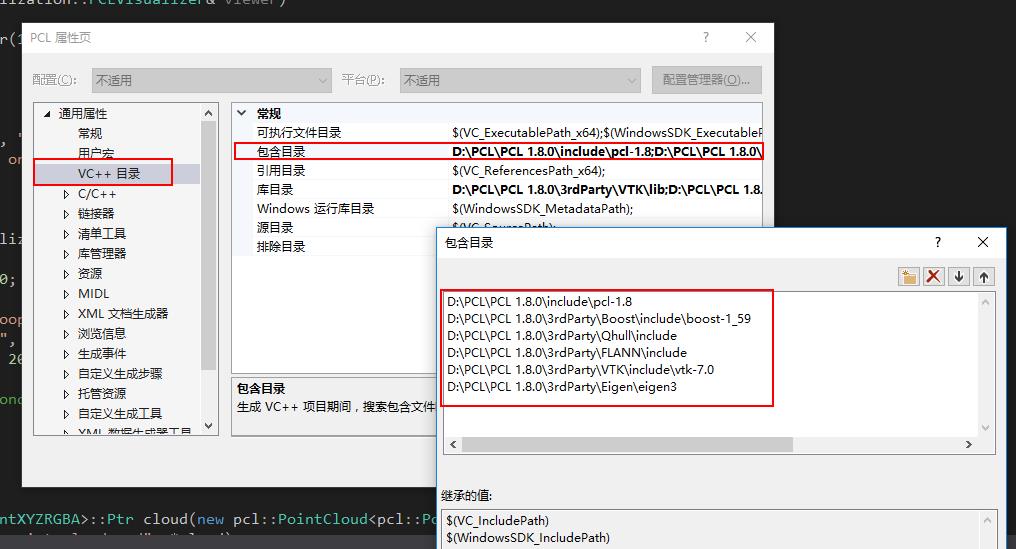
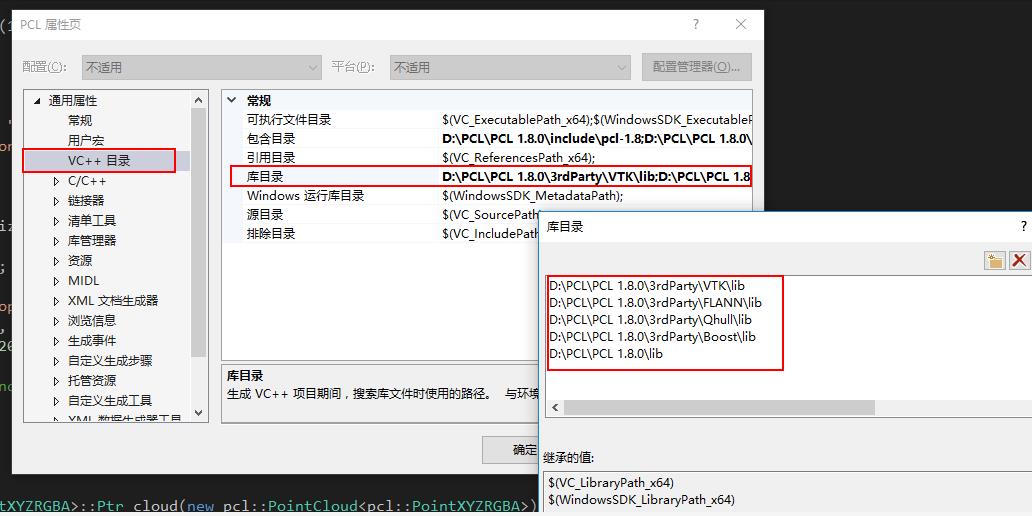
左侧VC++目录,包含目录设置如图:
左侧VC++目录,库目录设置如图:
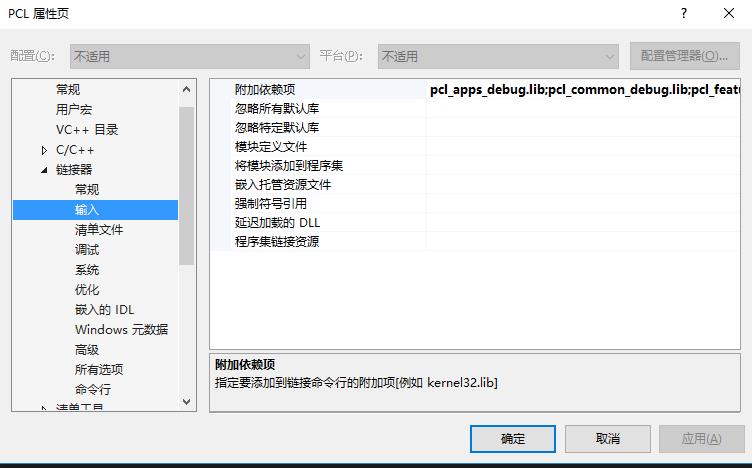
左侧链接器-输入,附加依赖项:
配置如下:
pcl_apps_debug.lib
pcl_common_debug.lib
pcl_features_debug.lib
pcl_filters_debug.lib
pcl_io_ply_debug.lib
pcl_io_debug.lib
pcl_kdtree_debug.lib
pcl_keypoints_debug.lib
pcl_ml_debug.lib
pcl_octree_debug.lib
pcl_outofcore_debug.lib
pcl_people_debug.lib
pcl_recognition_debug.lib
pcl_registration_debug.lib
pcl_sample_consensus_debug.lib
pcl_search_debug.lib
pcl_segmentation_debug.lib
pcl_simulation_debug.lib
pcl_stereo_debug.lib
pcl_surface_debug.lib
pcl_tracking_debug.lib
pcl_visualization_debug.lib
libboost_atomic-vc120-mt-gd-1_59.lib
libboost_chrono-vc120-mt-gd-1_59.lib
libboost_container-vc120-mt-gd-1_59.lib
libboost_context-vc120-mt-gd-1_59.lib
libboost_coroutine-vc120-mt-gd-1_59.lib
libboost_date_time-vc120-mt-gd-1_59.lib
libboost_exception-vc120-mt-gd-1_59.lib
libboost_filesystem-vc120-mt-gd-1_59.lib
libboost_graph-vc120-mt-gd-1_59.lib
libboost_iostreams-vc120-mt-
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1283
1283

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









