







NARF 关键点提取
代码如下
/* \author Bastian Steder */
#include <iostream>
#include <boost/thread/thread.hpp>
#include <pcl/range_image/range_image.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/range_image_border_extractor.h>
#include <pcl/keypoints/narf_keypoint.h>
#include <pcl/console/parse.h>
typedef pcl::PointXYZ PointType;
//参数
float angular_resolution = 0.5f;
float support_size = 0.2f;
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
bool setUnseenToMaxRange = false;
//打印帮助
void printUsage(const char*progName)
{
std::cout << "\n\nUsage: " << progName << " [options] <scene.pcd>\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-r <float> angular resolution in degrees (default " << angular_resolution << ")\n"
<< "-c <int> coordinate frame (default " << (int)coordinate_frame << ")\n"
<< "-m Treat all unseen points as maximum range readings\n"
<< "-s <float> support size for the interest points (diameter of the used sphere - "
<< "default " << support_size << ")\n"
<< "-h this help\n"
<< "\n\n";
}
// -----Main-----
int main(int argc, char**argv)
{
angular_resolution = pcl::deg2rad(angular_resolution);
//读取给定的pcd文件或者自行创建随机点云
pcl::PointCloud<PointType>::Ptr point_cloud_ptr(new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType>&point_cloud = *point_cloud_ptr;
pcl::PointCloud<pcl::PointWithViewpoint>far_ranges;
Eigen::Affine3f scene_sensor_pose(Eigen::Affine3f::Identity());
pcl::io::loadPCDFile("D:\\Data\\rabbit.pcd", point_cloud);
//从点云创建距离图像
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
boost::shared_ptr<pcl::RangeImage>range_image_ptr(new pcl::RangeImage);
pcl::RangeImage&range_image = *range_image_ptr;
range_image.createFromPointCloud(point_cloud, angular_resolution, pcl::deg2rad(360.0f), pcl::deg2rad(180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges(far_ranges);
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange();
// 创建3D点云可视化窗口,并显示点云
pcl::visualization::PCLVisualizer viewer("3D Viewer");
viewer.setBackgroundColor(1, 1, 1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange>range_image_color_handler(range_image_ptr, 0, 0, 0);
viewer.addPointCloud(range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "range image");
//viewer.addCoordinateSystem (1.0f);
//PointCloudColorHandlerCustom<PointType>point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
//viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
viewer.initCameraParameters();
//setViewerPose(viewer, range_image.getTransformationToWorldSystem());
// 显示距离图像
pcl::visualization::RangeImageVisualizer range_image_widget("Range image");
range_image_widget.showRangeImage(range_image);
//提取NARF关键点
pcl::RangeImageBorderExtractor range_image_border_extractor;
pcl::NarfKeypoint narf_keypoint_detector(&range_image_border_extractor);
narf_keypoint_detector.setRangeImage(&range_image);
narf_keypoint_detector.getParameters().support_size = support_size;
//narf_keypoint_detector.getParameters ().add_points_on_straight_edges = true;
//narf_keypoint_detector.getParameters ().distance_for_additional_points = 0.5;
pcl::PointCloud<int>keypoint_indices;
narf_keypoint_detector.compute(keypoint_indices);
std::cout << "Found " << keypoint_indices.points.size() << " key points.\n";
//在距离图像显示组件内显示关键点
//for (size_ti=0; i<keypoint_indices.points.size (); ++i)
//range_image_widget.markPoint (keypoint_indices.points[i]%range_image.width,
//keypoint_indices.points[i]/range_image.width);
//在3D窗口中显示关键点
pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>&keypoints = *keypoints_ptr;
keypoints.points.resize(keypoint_indices.points.size());
for (size_t i = 0; i < keypoint_indices.points.size(); ++i)
keypoints.points[i].getVector3fMap() = range_image.points[keypoint_indices.points[i]].getVector3fMap();
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>keypoints_color_handler(keypoints_ptr, 0, 255, 0);
viewer.addPointCloud<pcl::PointXYZ>(keypoints_ptr, keypoints_color_handler, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "keypoints");
// 主循环
while (!viewer.wasStopped())
{
range_image_widget.spinOnce();// process GUI events
viewer.spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
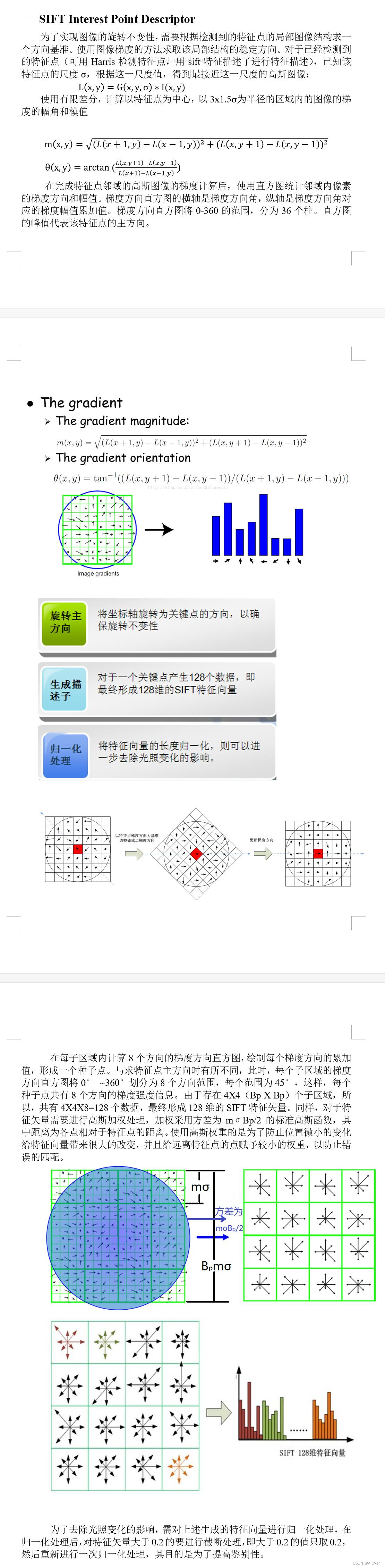
SIFT关键点提取
原理介绍
代码如下
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/keypoints/sift_keypoint.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/time.h>
using namespace std;
namespace pcl
{
template<>
struct SIFTKeypointFieldSelector<PointXYZ>
{
inline float
operator () (const PointXYZ &p) const
{
return p.z;
}
};
}
int
main(int argc, char *argv[])
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_xyz(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("rabbit.pcd", *cloud_xyz);
const float min_scale = 0.001f; //设置尺度空间中最小尺度的标准偏差
const int n_octaves = 3; //设置高斯金字塔组(octave)的数目
const int n_scales_per_octave = 15; //设置每组(octave)计算的尺度
const float min_contrast = 0.0001f; //设置限制关键点检测的阈值
pcl::SIFTKeypoint<pcl::PointXYZ, pcl::PointWithScale> sift;//创建sift关键点检测对象
pcl::PointCloud<pcl::PointWithScale> result;
sift.setInputCloud(cloud_xyz);//设置输入点云
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
sift.setSearchMethod(tree);//创建一个空的kd树对象tree,并把它传递给sift检测对象
sift.setScales(min_scale, n_octaves, n_scales_per_octave);//指定搜索关键点的尺度范围
sift.setMinimumContrast(min_contrast);//设置限制关键点检测的阈值
sift.compute(result);//执行sift关键点检测,保存结果在result
cout << "Extracted " << result.size() << " keypoints" << endl;
//为了可视化需要将点类型pcl::PointWithScale的数据转换为点类型pcl::PointXYZ的数据
//方法一
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_temp(new pcl::PointCloud<pcl::PointXYZ>);
copyPointCloud(result, *cloud_temp);
//方法二
/*pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_temp(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>& cloud_sift = *cloud_temp;
pcl::PointXYZ point;
for (int i = 0; i < result.size(); i++)
{
point.x = result.at(i).x;
point.y = result.at(i).y;
point.z = result.at(i).z;
cloud_sift.push_back(point);
}*/
//可视化输入点云和关键点
pcl::visualization::PCLVisualizer viewer("Sift keypoint");
viewer.setBackgroundColor(255, 255, 255);
viewer.addPointCloud(cloud_xyz, "cloud");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 255, 0, "cloud");
viewer.addPointCloud(cloud_temp, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 0, 255, "keypoints");
while (!viewer.wasStopped())
{
viewer.spinOnce();
}
return 0;
}
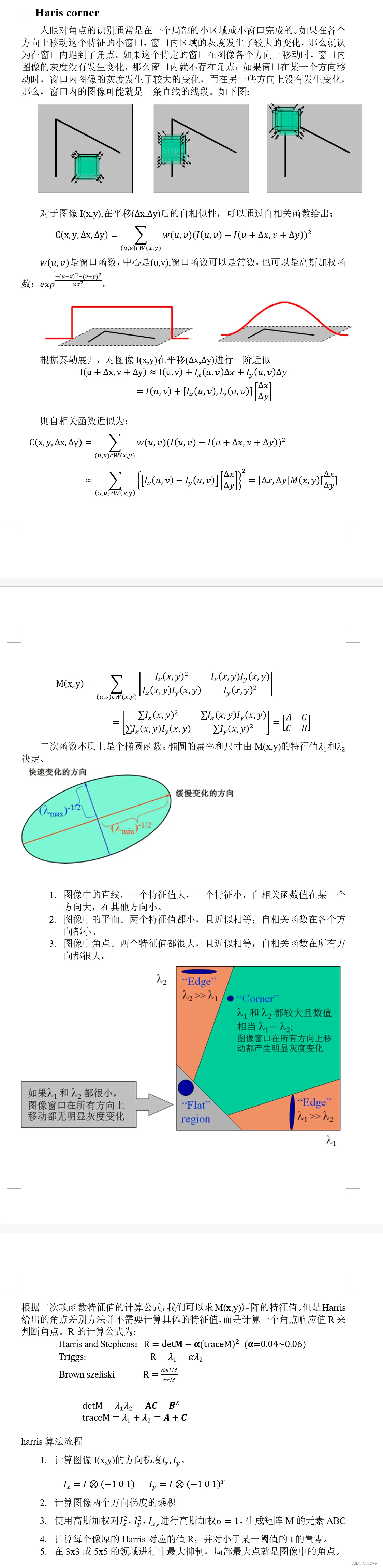
Harris 关键点提取
原理介绍
代码如下
#include <iostream>
#include <cstdlib>
#include <vector>
#include <pcl\io\pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/console/parse.h>
#include <boost/thread/thread.hpp>
#include <pcl/keypoints/harris_3D.h>//harris特征点估计类头文件声明
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int main()
{
//----------读取点云数据---------------
pcl::PointCloud<pcl::PointXYZ>::Ptr input_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile("rabbit.pcd", *input_cloud);
//-----创建Harris关键点估计对象,并创建Harris_keypoints对象用于保存Harris关键点
//注意此处PCL的point类型设置为<pcl::PointXYZI>,即除了x、y、z坐标还必须包含强度信息
pcl::HarrisKeypoint3D<pcl::PointXYZ, pcl::PointXYZI, pcl::Normal> harris;
pcl::PointCloud<pcl::PointXYZI>::Ptr Harris_keypoints(new pcl::PointCloud<pcl::PointXYZI>());
//----------设置Harris特征检测对象参数--------------------------------
harris.setRadius(0.01);//设置法向量估计的半径
harris.setRadiusSearch(0.01);//设置关键点估计的近邻搜索半径
harris.setInputCloud(input_cloud);
//harris.setNormals(normal);//如果有预先计算的法线,则设置法线
harris.setNonMaxSupression(true);//设置是否应应用非极大值抑制或应返回每个点的响应(非必需参数)
harris.setNumberOfThreads(6);//初始化调度程序并设置要使用的线程数
harris.setMethod(pcl::HarrisKeypoint3D<pcl::PointXYZ, pcl::PointXYZI>::LOWE);//设置要计算响应的方法(可以不设置)
harris.compute(*Harris_keypoints);
cout << "Harris_keypoints的大小是" << Harris_keypoints->size() << endl;
pcl::PCDWriter writer;
writer.write<pcl::PointXYZI>("Harris_keypoints.pcd", *Harris_keypoints, false);
//-----------可视化---------------------------
boost::shared_ptr<pcl::visualization::PCLVisualizer>viewer(new pcl::visualization::PCLVisualizer("显示点云"));
viewer->setBackgroundColor(255, 255, 255); //设置背景颜色为白色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZI> harris_color_handler(Harris_keypoints, 255, 0, 0);
viewer->addPointCloud<pcl::PointXYZI>(Harris_keypoints, harris_color_handler, "Harris_keypoints");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "Harris_keypoints");
viewer->addPointCloud(input_cloud, "input_cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 255, 0, "input_cloud");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(1000));
}
return (0);
}
基于对应点分类的对象识别
https://blog.csdn.net/suyunzzz/article/details/99411617















 1873
1873











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











