






几种流行的并行方法:
- 数据并行(data parallel)
- 模型并行(model parallel)
- tensor并行
- pipeline并行
- sequence并行
- Zero Redundancy Data Parallelism(ZeRO)
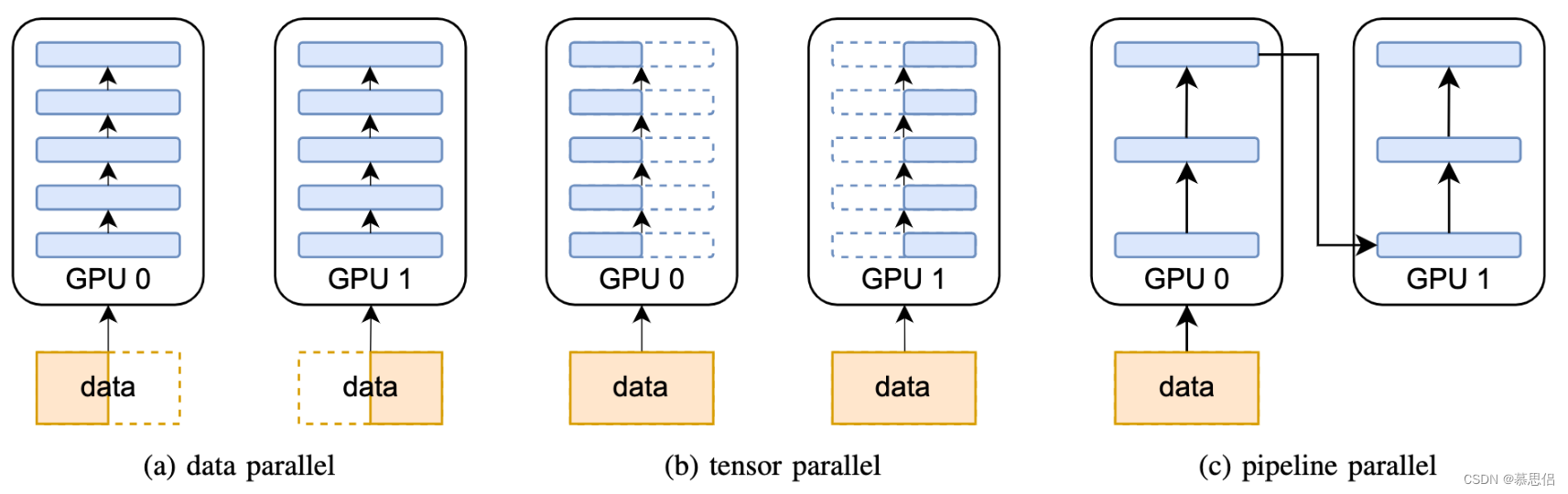
Data parallelism (DP)
经典的数据并行算法是在多个设备上都拷贝一份完整的模型参数,彼此之间可以独立计算,所以每个设备传入的输入数据不一样,这也是为什么叫数据并行。只不过,每隔一段时间(比如一个batch或者若干个batch)后需要彼此之间同步模型权重的梯度。随着模型大小不断增大,单个GPU的内存已经无法容纳现如今的大模型,所以便有了后面会介绍的模型并行。
Model Parallelism (MP)
Pipeline Parallelism (PP)
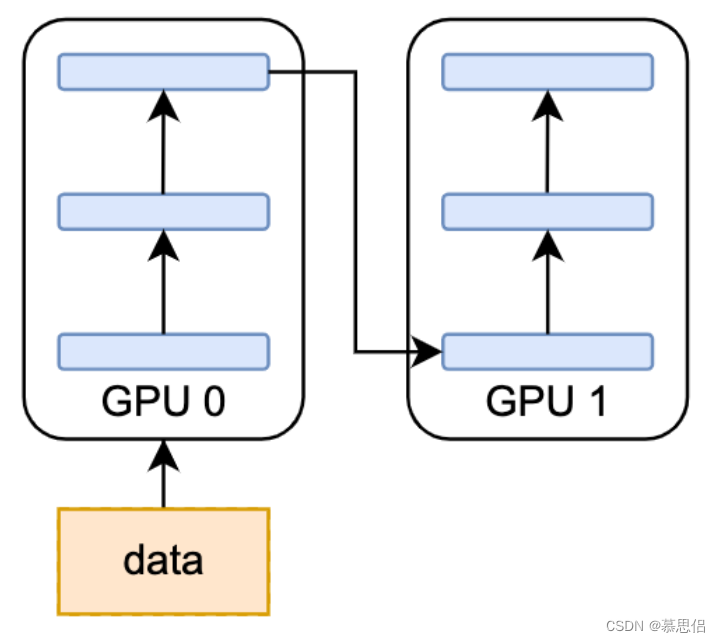
pipeline parallelism是比较常见的模型并行算法,它是模型做层间划分,即inter-layer parallelism。以下图为例,如果模型原本有6层,你想在2个GPU之间运行pipeline,那么每个GPU只要按照先后顺序存3层模型即可。
已经有很多Pipeline相关的研究工作了,例如PipeDream,GPipe,和Chimera。它们的主要目的都是降低bubble time。
Tensor Parallelism (TP)
前面介绍的Pipeline Parallelism是对模型层间做划分,叫inter-layer parallelism。那么另一种方式则是对模型层内做划分,即intra-layer Parallelism,也叫Tensor Parallelism。
1D Tensor Parallelism
Megatron-LM [1] 是最早提出1D Tensor并行的工作。该工作主要是为了优化transformer训练效率,把线性层按照行或者列维度对权重进行划分。如图4所示,原本线性层为,这里将
按列进行划分,将
按行进行划分。这样,每个GPU只需要存一半的权重即可,最后通过All-reduce操作来同步Y的结果。当GPU数量为N𝑁时,每个GPU只需要存1N的权重即可,只不过每层输出需要用All-reduce来补全结果之后才能继续下一层的计算。
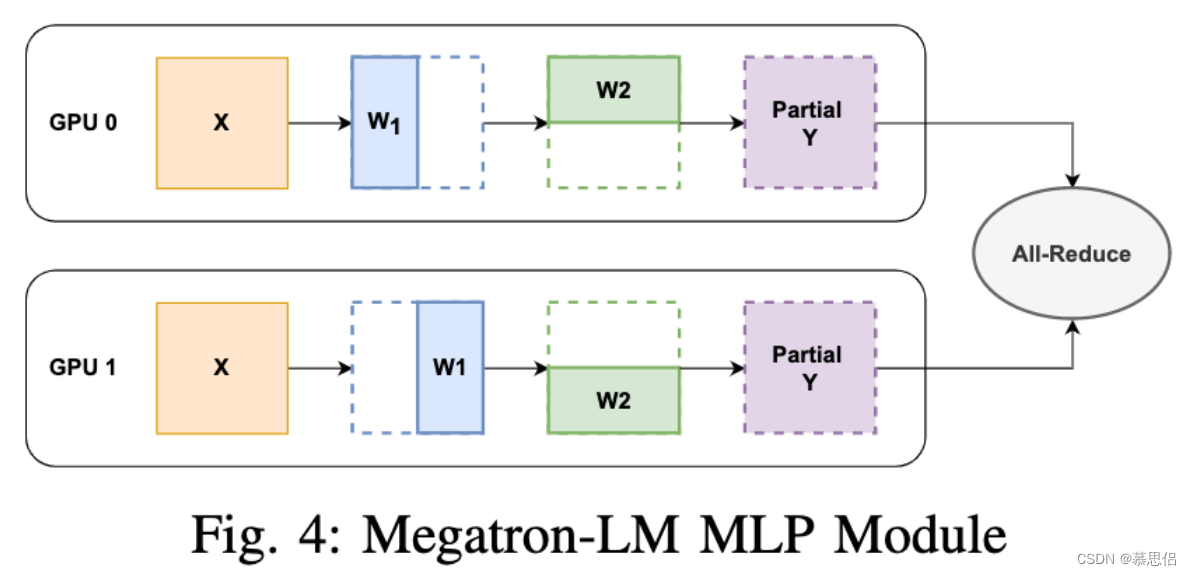
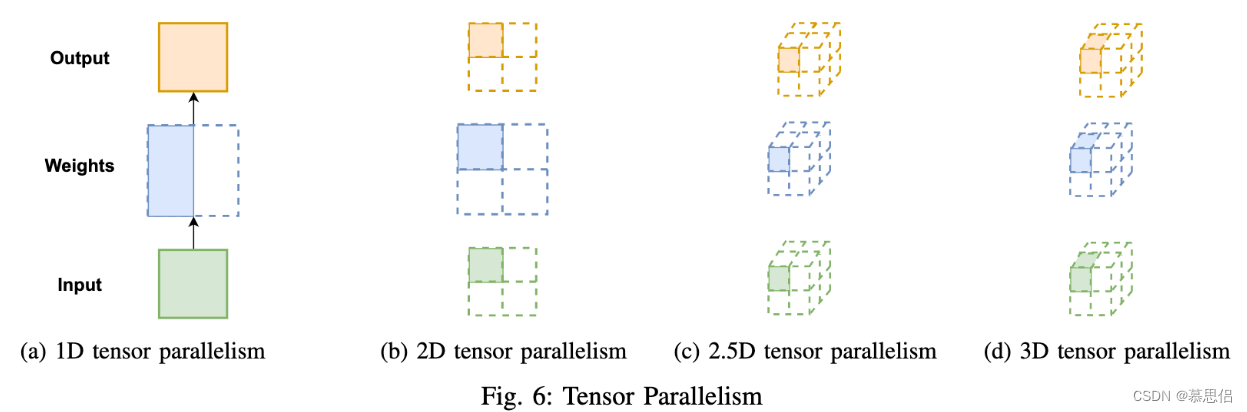
1D Tensor并行对通信速度要求较高,不过1D在每层的输入和输出都有冗余的内存开销。以图4为例,我们可以看到虽然模型权重被划分了,但是每个GPU都有重复的输入X𝑋,另外All-reduce之后每个GPU也会有重复的输出Y𝑌,所以后续一些工作尝试从这里做进一步改进,包括2D, 2.5D,和3D tensor并行。
2D Tensor Parallelism
2D Tensor Parallel [2] 基于SUMMA和Cannon矩阵相乘算法沿着两个不同的维度对 输入数据,模型权重,每层的输出 进行划分。给定N𝑁个GPU,tensor会被划分成N𝑁个chunk(使用torch.chunk),每个GPU保存一个chunk。这N𝑁个GPU呈方形网络拓扑结构,即每行每列均为√N𝑁个GPU。图6b展示了常见的4-GPU的节点划分示意图,假设tensor的维度大小是[P,Q][𝑃,𝑄],那么划分后每个GPU上存的chunk大小即为[P/√N,Q/√N][𝑃/𝑁,𝑄/𝑁]。至此,每个GPU都只会保存部分的输入输出以及部分的权重。虽然相比于1D Tensor并行,2D额外增加了模型权重的通信,但是需要注意的是当GPU数量很多的时候,每个GPU上分配的模型权重就会小很多,而且因为使用的All-reduce通信方式,所以2D也还是要比1D更高效的。
2.5D Tensor Parallelism
2.5D Tensor Parallel [3] 是受2.5D矩阵乘法算法 [4] 启发进一步对2D Tensor并行的优化。具体来说2.5D增加了 depth 维度。当 depth=1 时等价于2D;当 depth>1 时,
同样假设有N𝑁个GPU,其中N=S2∗D𝑁=𝑆2∗𝐷,S𝑆类似于原来2D正方形拓扑结构的边长,而D𝐷 则是新增加的维度 depth 。D𝐷可以由用户指定,S𝑆 则会自动计算出来了。所以一般来说至少需要8个GPU才能运行2.5D算法,即S=2,D=2𝑆=2,𝐷=2。
3D Tensor Parallelism
3D Tensor Parallel [5] 是基于3D矩阵乘法算法 [6] 实现的。假设有 N𝑁个 GPU,tensor维度大小为[P,Q,K][𝑃,𝑄,𝐾],那么每个chunk的大小即为 [P/3√N,Q/3√N,K/3√N][𝑃/𝑁3,𝑄/𝑁3,𝐾/𝑁3]。当tensor维度小于3时,以全连接层为例,假设权重维度大小为 [P,Q][𝑃,𝑄] ,那么可以对第一个维度划分两次,即每个chunk的维度大小为 [P/(3√N)2,Q/3√N][𝑃/(𝑁3)2,𝑄/𝑁3] 。3D Tensor并行的通信开销复杂度是 O(N1/3)𝑂(𝑁1/3) ,计算和内存开销都均摊在所有GPU上。
小结
1D Tensor并行每一层的输出是不完整的,所以在传入下一层之前都需要做一次All-gather操作,从而使得每个GPU都有完整的输入,如图7a所示。
2D/2.5D/3D Tensor 并行算法因为在一开始就对输入进行了划分, 所以中间层不需要做通信,只需要在最后做一次通信即可。在扩展到大量设备(如GPU)时,通信开销可以降到很小。这3个改进的Tensor并行算法可以很好地和Pipeline并行方法兼容。
Zero Redundancy Data Parallelism (ZeRO)
训练过程中GPU内存开销主要包含以下几个方面:
- 模型状态内存(Model State Memory):
- 梯度
- 模型参数
- 优化器状态:当使用像Adam这样的优化器时,优化器的状态会成为GPU内存开销的大头。前面介绍的DP,TP, PP算法并没有考虑这个问题。
- 激活内存(Activation Memory):在优化了模型状态内存之后,人们发现激活函数也会导致瓶颈。激活函数计算位于前向传播之中,用于支持后向传播。
- 碎片内存(Fragmented Memory):深度学习模型的低效有时是由于内存碎片所导致的。在模型之中,每个张量的生命周期不同,由于不同张量寿命的变化而会导致一些内存碎片。由于这些碎片的存在,会导致即使有足够的可用内存,也会因为缺少连续内存而使得内存分配失败。ZeRO 根据张量的不同寿命主动管理内存,防止内存碎片。
ZeRO针对模型状态的三部分都做了对应的内存改进方法:
- ZeRO1:只划分优化器状态(optimizer states, os),即Pos
- ZeRO2:划分优化器状态和梯度(gradient, g),即Pos+g
- ZeRO3:划分优化器状态和梯度和模型参数(parameters, p),即Pos+g+p
下图给出了三种方法带来的内存开销收益
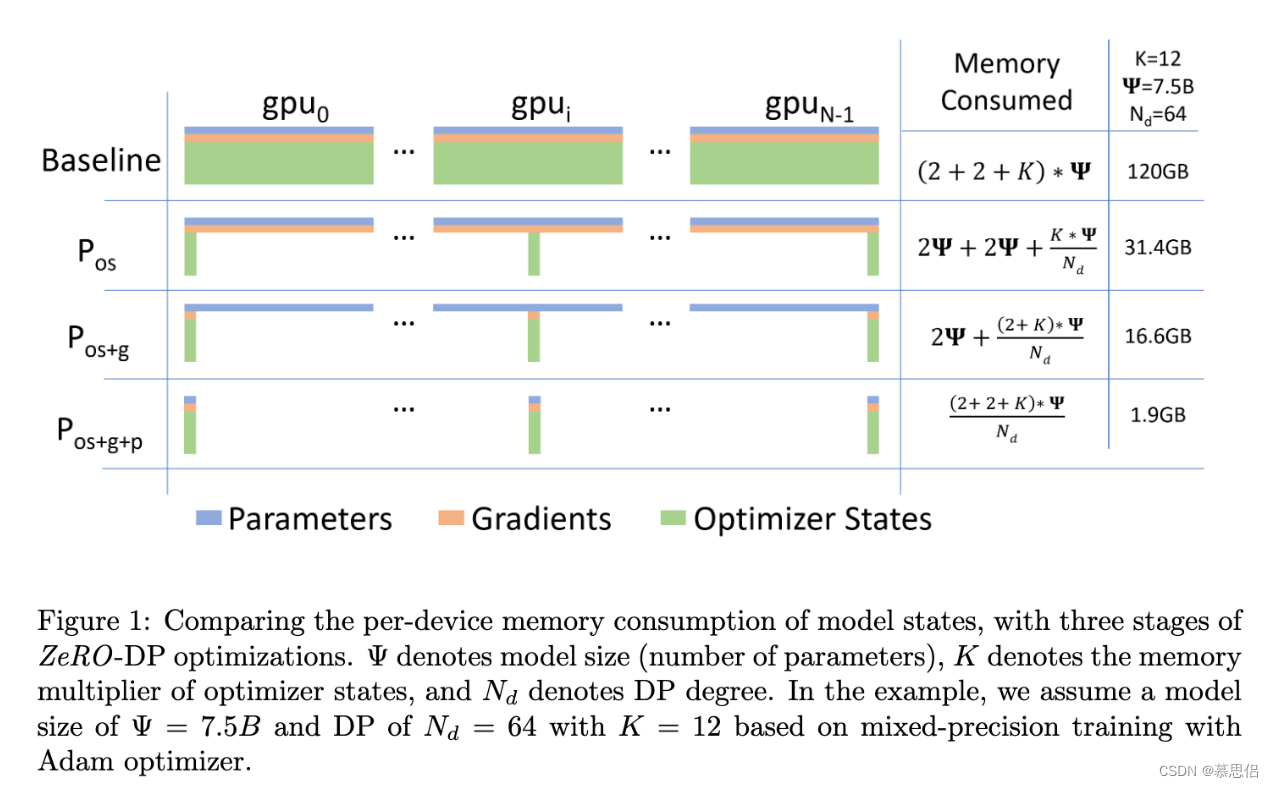
不管采用三种方法的哪一种,ZeRO简单理解就是给定N𝑁个设备,然后把一堆data等分到这些设备上,每个设备只存1/N1/𝑁的数据量,并且每次也只负责更新这1/N1/𝑁的数据。
因为对数据做了划分,ZeRO在每一层都需要有通信操作。我们考虑ZeRO在某一层的具体操作:
- 在forward的时候,会首先使用all-gather让每个设备拥有该层完整的模型权重,然后计算得到输出,最后每个设备会只保留原来的权重,即把all-gather过来的权重扔掉,这样可以节省开销。
- 在backward的时候,同样会先all-gather该层的所有权重,然后计算梯度,最后也会把梯度进行划分,每个设备上只会存1/N对应的梯度数据。
注意ZeRO对数据划分方式并没有什么具体的要求,可以是随意划分,因为最后反正会用all-gather使得所有设备商都有用完整的数据;当然,也可以使用前面提到的Tensor Parallelism的划分方式,这样一来可以有效降低通信开销,进一步提高效率。

















 1746
1746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









