






锐化的主要目的是突出灰度的过渡部分。大部分的过度部分指的是图像的边缘和图像的噪点。图像的模糊操作可以采用积分求和来实现,而图像的锐化则可以使用微分来实现。
对于一幅二维图像,我们使用f(x,y)来表示,其中,x和y表示二维图像的像素坐标。
数字图像函数f(x,y)的微分定义:
对于一元函数f(x)表达一阶微分的定义是一个差值:
∂f/∂x = f(x+1) − f(x)
二阶导数:(∂f/∂x)/∂x = f(x+2) - f(x+1) -f(x+1)+f(x)
相当于:f(x+1)-2f(x)+f(x-1)
这里,为了与对二元图像函数f(x,y)求微分时的表达式保持一致,使用偏导数符号,对二元函数,我们将沿着两个空间轴处理偏微分,类似地,用差分定义二阶微分:
 + f(x - 1) - 2f(x)")
通过以上定义,可以看出,在离散数字图像中某个像素点的微分,是通过改点与其周围的像素点的像素值的差值来表示的。例如,如果某个像素的周围是和其值一样的像素,通过以上公式,显而易见,该像素点的微分值为0,如果不同,微分值的大小可以表示该像素点与其周围像素的差异大小。我们通过微分值对原图像进行调整,即可达到锐化的效果。
基于二阶微分的图像增强--拉普拉斯算子
处理方法最简单的各向同性微分算子是拉普拉斯算子,一个二元图像函数f(x,y)的拉普拉斯变换定义为:

 + f(x - 1,y) - 2f(x,y)")
 + f(x,y - 1) - 2f(x,y)")
即:
 + f(x - 1,y) + f(x,y + 1) + f(x,y - 1) - 4f(x,y)")
所以拉普拉斯变换可以由下面的系数矩阵来计算:
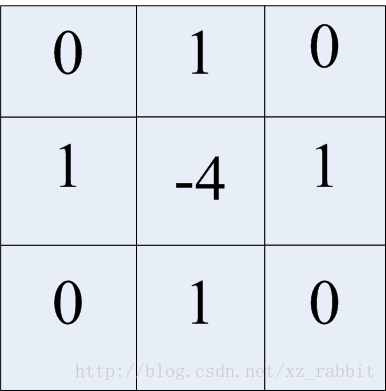
对于任意的像素点,将该像素点的值的4倍与其上下左右四个像素值作差值的结果,就是该像素经过拉普拉斯变换后的结果。如前述,微分值的大小可以表示该像素点与其周围像素的差异大小。所以,为了保持原图像的特性,我们需要将原图像与使用拉普拉斯变换后的值相加,这样,既保持原图像的特征,又达到了锐化的效果。
下面是拉普拉斯变换的代码:
#include <opencv2/opencv.hpp> //使用opencv对图片进行操作
#include <cmath>
#include <iostream>
#include <string>
int main()
{
Mat src = imread("图片路径");
Mat dst(src.rows, src.cols,CV_8UC1,Scalar::all(0));//定义一张和原图片相同大小的目标图片
//存储拉普拉斯变换的结果 为了方便没有对图像边缘进行处理
for (int row = 1; row < dst.rows-1; row++)//行循环
{
for (int col = 1; col < dst.cols-1; col++)//列循环
{
//通过系数模版进行变换
dst.at<uchar>(row, col) =
+ src.at<uchar>(row - 1, col)
+ src.at<uchar>(row, col - 1)
+ src.at<uchar>(row, col + 1)
+ src.at<uchar>(row + 1, col)
- 4 * src.at<uchar>(row, col);
}
}
//将拉普拉斯变换的结果与原图片相加
for (int row = 0; row < dst.rows; row++)
{
for (int col = 0; col < dst.cols; col++)
{
dst.at<uchar>(row, col) -= src.at<uchar>(row, col);//模版中心系数为负数时要减去,正数时相加
}
}
imshow("dst", dst);//显示变换的结果
}
使用一阶微分对(非线性)图像锐化—梯度
图像吃力中的一阶微分是用梯度幅值来实现的。一个函数f在f(x,y)的梯度是定义为二维列向量(这是一个矢量,给定了一个方向):

然后其幅度值为
 ,
,
其中M(x,y)是与原图像大小相同的图像,该图像通常称为梯度图像。同样,我们可以上述的拉普拉斯算法定义一个过滤器模版,通过线性运算进行锐化图像,这里不再赘述。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









