







 Grid R-CNN是CVPR2019提出的一种目标检测算法,它结合了Faster RCNN和CornerNet的优点,使用关键点检测确定目标框位置。论文中,Grid R-CNN通过9个关键点预测取代位置回归,提高了检测精度。在inference阶段,9个关键点的加权求和得到预测框边界。特征融合和extended region mapping的优化进一步提升了模型效果。
Grid R-CNN是CVPR2019提出的一种目标检测算法,它结合了Faster RCNN和CornerNet的优点,使用关键点检测确定目标框位置。论文中,Grid R-CNN通过9个关键点预测取代位置回归,提高了检测精度。在inference阶段,9个关键点的加权求和得到预测框边界。特征融合和extended region mapping的优化进一步提升了模型效果。
论文:Grid R-CNN
论文链接:https://arxiv.org/abs/1811.12030
代码链接:https://github.com/STVIR/Grid-R-CNN
代码链接2:https://github.com/open-mmlab/mmdetection
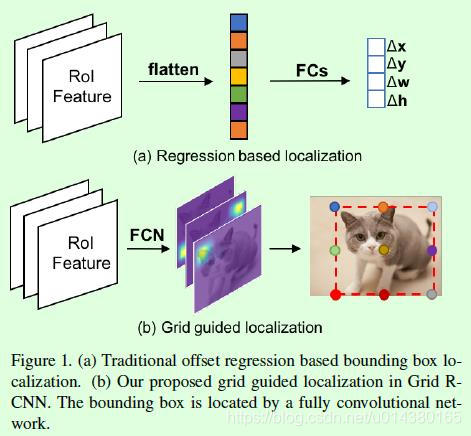
这篇目标检测论文发表在CVPR2019,整体上是将two-stage类型的目标检测算法中的位置回归支路用基于关键点检测的支路来代替从而取得更好的实验结果,如图Figure1所示。比较有吸引力的点自然就是基于关键点检测,论文发表的背景正好是CornerNet提出没多久的时候,CornerNet将关键点预测引入目标检测算法从而实现在没有anchor的情况下准确预测目标框位置的目标,但是Grid RCNN还是基于anchor来实现的,因此算是比较有特点的算法。
显然,Grid RCNN是基于anchor的two-stage算法,RPN部分的训练和Faster RCNN一样,但是检测部分采用基于关键点的预测来确定目标框的位置,因此很像是结合了Faster RCNN和CornerNet的产物,网络的整体框架如Figure2所示。和CornerNet中采用两个关键点不同,Grid RCNN采用了更多的预测点(默认是9个关键点),这是为了避免单个预测点预测不准带来的效果下降,反正不会对速度造成太大的影响,所以能利用更多的信息当然更好。
Grid RCNN的主体部分还是和Faster RCNN类似,只不过RoI Pooling用精度更高的RoI Align代替,RoI Align后得到的特征图尺寸设计为14×14。分类支路和Faster RCNN算法是一致的,但是关键点预测支路(grid branch)稍有不同。关键点支路包含dilated卷积层和反卷积层,最后得到9组
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1752
1752

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









