






线性自抗扰(LADRC)的stm32f1程序,实现用编码器反馈控制直流电机调速,控制器采用加了TD的LADRC,控制效果良好,.h和.c分开,代码清晰有注释。
有调试说明
YID:1235653714412755
tbNick_9w978
线性自抗扰控制(LADRC)是一种广泛应用于控制系统中的先进控制方法。本文将围绕着LADRC在stm32f1程序中的应用展开,着重介绍如何利用编码器反馈来实现直流电机的调速控制。在这个过程中,我们将使用包含.h和.c文件的结构化代码,以实现可读性和可维护性的要求。
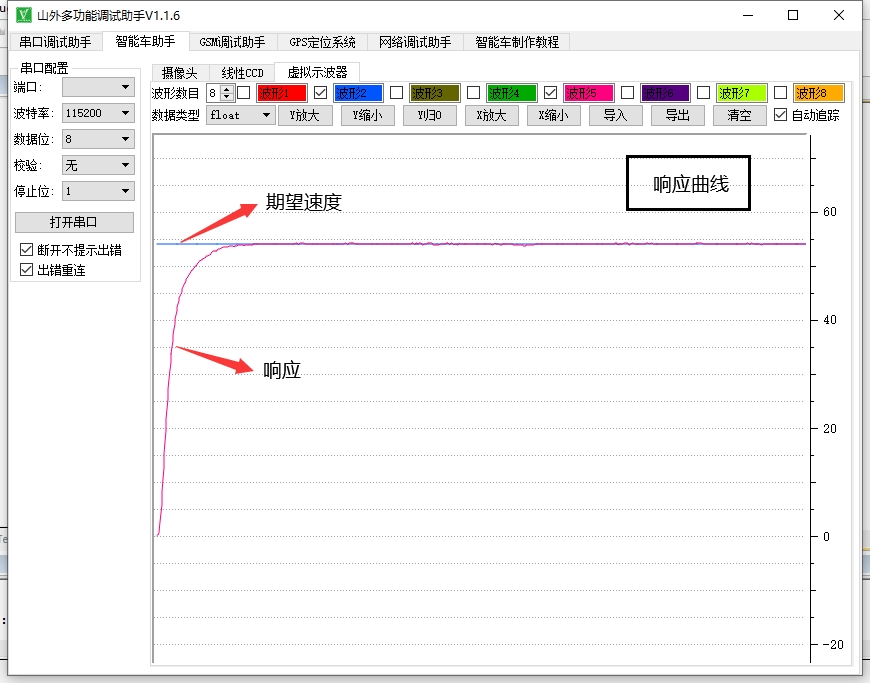
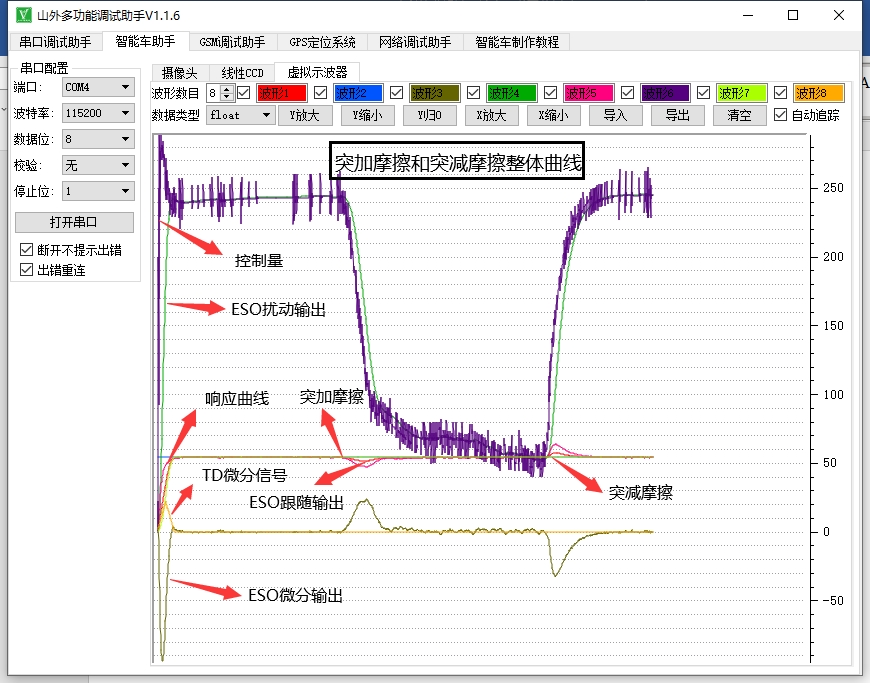
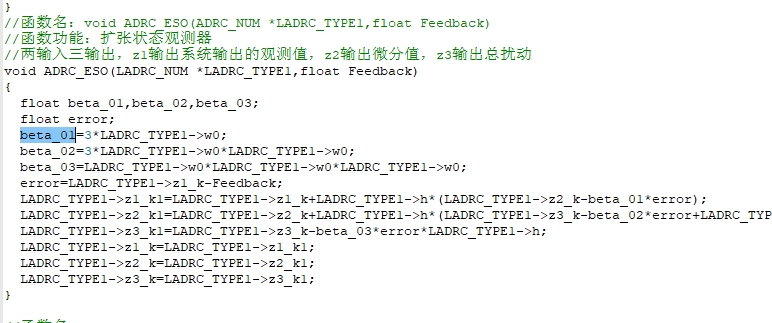
首先,对于初学者来说,理解LADRC控制器的工作原理非常重要。LADRC控制器通过引入自抗扰环节,以实现对系统不确定性的自适应补偿,从而提高了系统的鲁棒性和动态性能。其核心思想在于通过将系统的扰动视为系统自身的抗扰力,从而实现对扰动的自适应控制。
在stm32f1程序中,我们可以利用编码器反馈来获取直流电机的转速信息。编码器是一种包含光电传感器的传感器,它可以对电机的旋转进行精确计数,从而实现对电机位置和速度的准确监测。通过读取编码器的信号,我们可以获得直流电机的旋转角度,并通过简单的计算得到其转速。
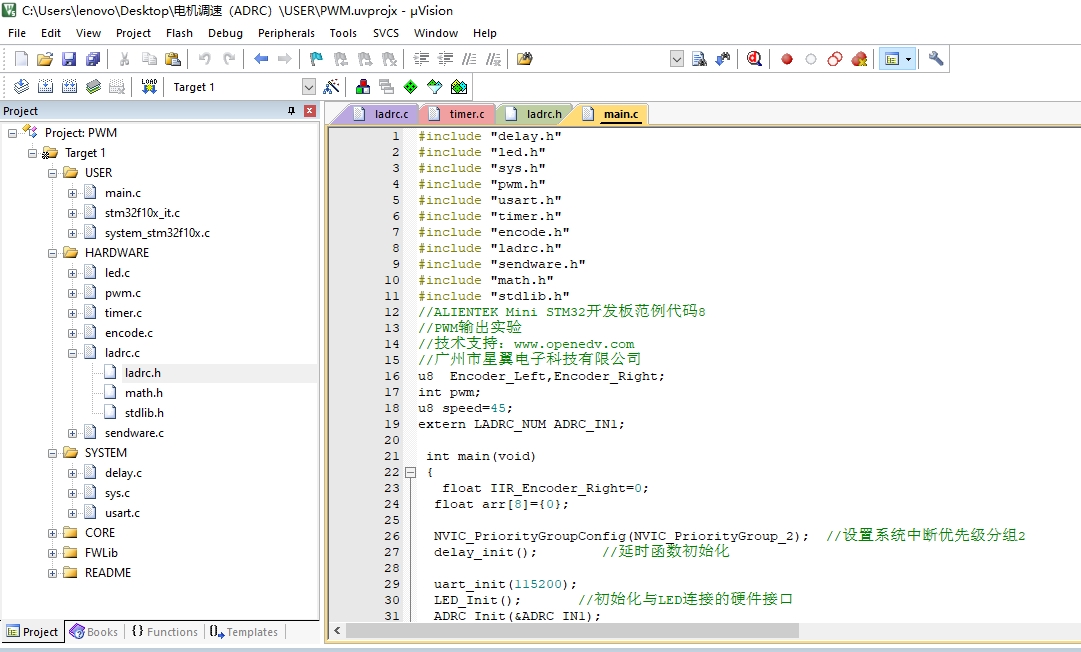
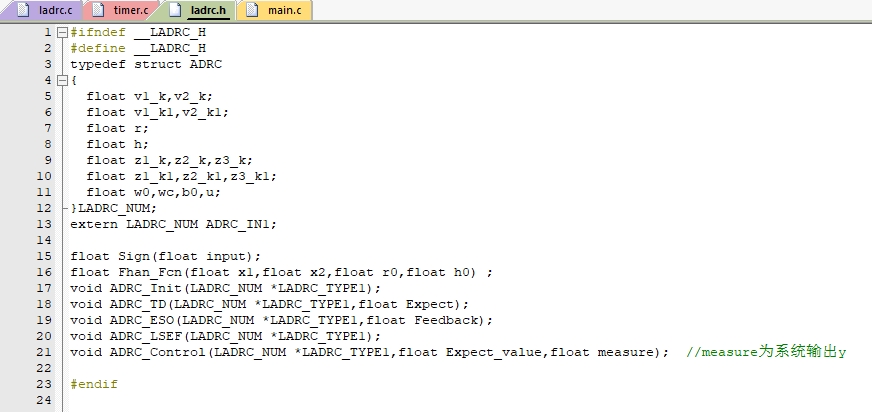
接下来,我们将介绍如何使用LADRC控制器来实现直流电机的调速控制。首先,在stm32f1程序中,我们需要将LADRC控制器的相关代码分别编写在.h和.c文件中。这样的结构化编程方式可以提高代码的可读性和可维护性。在.h文件中,我们可以定义LADRC控制器所需的各种参数和函数接口;在.c文件中,我们可以根据实际需求编写控制器的初始化、参数调整和控制逻辑等功能。
同时,在进行LADRC控制器的实现过程中,我们还需要进行调试和验证。调试可以帮助我们发现潜在的问题和错误,并及时进行修正。在调试过程中,我们可以通过打印调试信息或者利用调试工具来监测控制器的各种参数和状态,从而验证控制器的正确性和稳定性。
综上所述,本文围绕线性自抗扰控制(LADRC)在stm32f1程序中的应用展开,重点介绍了如何利用编码器反馈来实现直流电机的调速控制。通过引入LADRC控制器,我们可以有效地提高系统的鲁棒性和动态性能。同时,结构化的代码编写方式和调试验证过程也可以帮助我们提高代码的可读性和可维护性,从而更好地实现控制目标。
尽管本文仅仅介绍了LADRC控制器在stm32f1程序中的应用,但我们相信这些基础内容足以帮助读者对LADRC控制器有一个初步的了解和认识。希望通过本文的阐述,读者们能够为自己的控制系统设计和开发提供一些参考和启示,从而不断提升自己的技术水平和创新能力。
以上相关代码,程序地址:http://coupd.cn/653714412755.html















 619
619

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









