






跳点搜索算法(JPS)融合动态窗口法,JPS规划全局路径,动态窗口法执行动态避障。
ID:7839688724172712
云的歌儿
跳点搜索算法(Jump Point Search,简称JPS)是一种高效的路径搜索算法,它在规划全局路径时能够显著减少搜索时间和计算资源的消耗。在JPS的基础上,我们可以将动态窗口法(Dynamic Window Approach,简称DWA)引入,使得路径规划的过程更加适应动态环境中的避障需求。
JPS的核心思想是通过跳跃搜索的方式来寻找路径上的关键点,从而减少不必要的搜索操作。相比于传统的路径搜索算法,JPS能够在搜索过程中跳过一些中间节点,直接搜索到下一个节点。这种跳跃式的搜索策略,使得JPS具有更高的搜索效率和更低的计算复杂度。通过在搜索过程中预先计算并存储跳跃点,JPS能够在保证搜索结果准确性的同时,大大减少了搜索的时间开销。
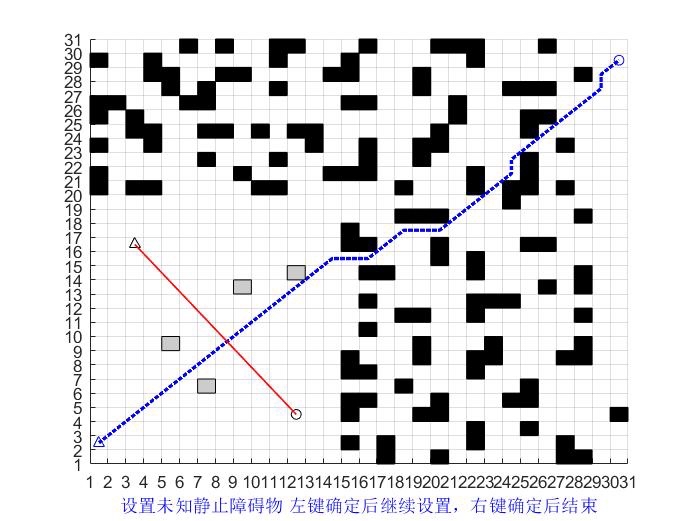
在融合动态窗口法之后,JPS的路径规划能够更好地适应动态环境中的避障需求。动态窗口法是一种基于机器人动力学模型和环境感知信息的避障方法,它通过动态调整机器人的速度和方向,以适应环境变化和避免障碍物。将动态窗口法与JPS相结合,可以使路径规划过程更具灵活性和可适应性,提高机器人在动态环境中的导航能力。
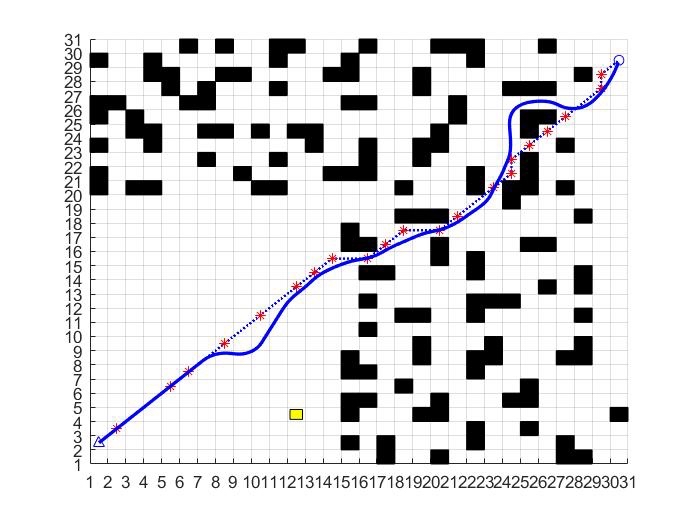
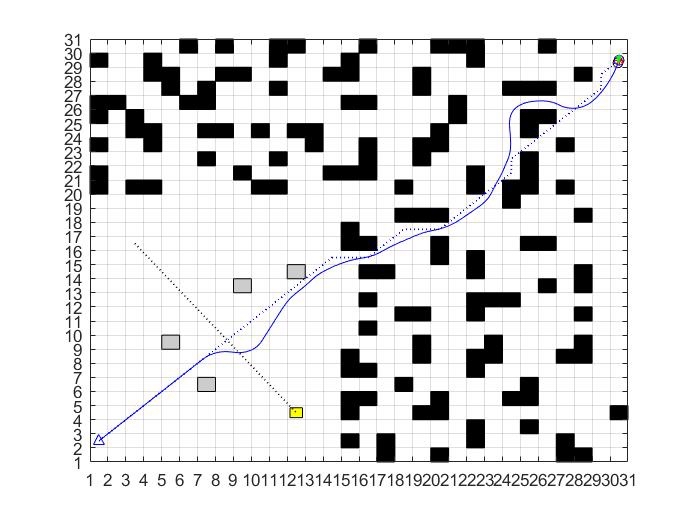
在JPS规划全局路径的基础上,动态窗口法执行动态避障。首先,JPS根据地图信息和起始点,计算出全局路径。然后,动态窗口法根据当前环境感知信息,动态调整机器人的速度和方向。通过不断重复这个过程,机器人能够在动态环境中实时更新路径规划结果,并灵活地避开障碍物。
JPS融合动态窗口法在实际应用中具有广泛的应用前景。例如,在移动机器人导航领域,JPS能够实现高效的路径规划,而动态窗口法能够使机器人在复杂的动态环境中执行避障操作。通过将两者结合运用,可以使机器人具备更强大的导航能力,应对各种复杂的实际应用场景。
总之,跳点搜索算法(JPS)融合动态窗口法能够在路径规划过程中实现高效的路径搜索和动态避障。JPS通过跳跃式搜索的方式减少了不必要的搜索操作,大大提高了搜索效率和计算资源的利用率。而动态窗口法则通过动态调整机器人的速度和方向,使其能够在动态环境中实时更新路径规划结果,并灵活地避开障碍物。这种融合方法为机器人导航领域带来了更高效、更灵活的路径规划和避障能力,具有重要的研究和应用价值。
相关的代码,程序地址如下:http://fansik.cn/688724172712.html


















 735
735

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









