






自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真
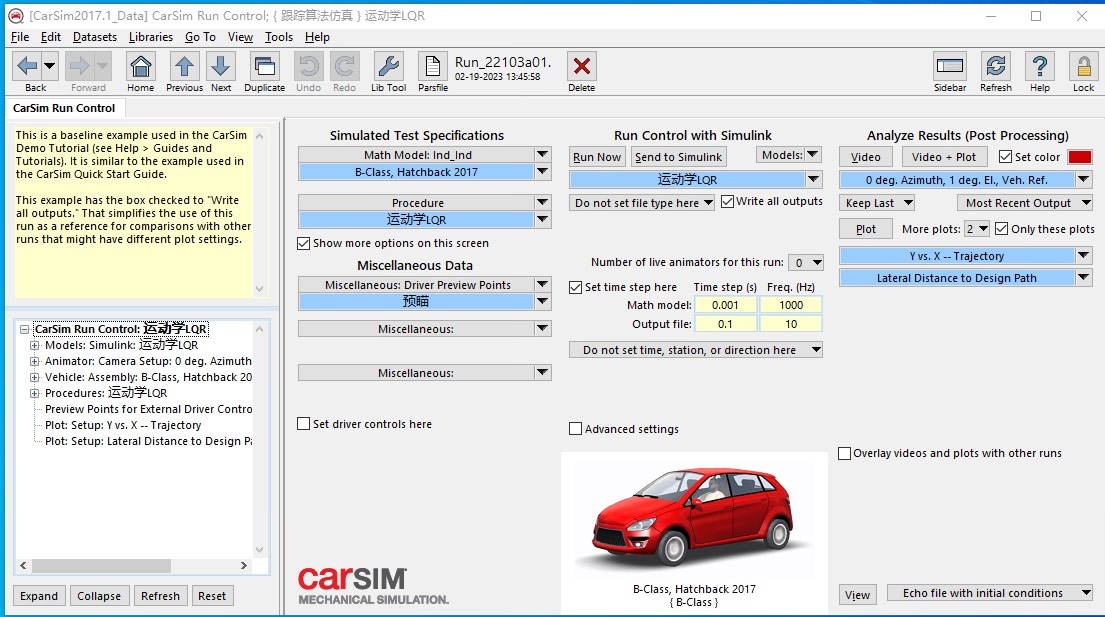
matlab和simulink联合仿真,运动学模型实现的lqr横向控制,可以跟踪双移线,五次多项式,以及其他各种自定义路径。
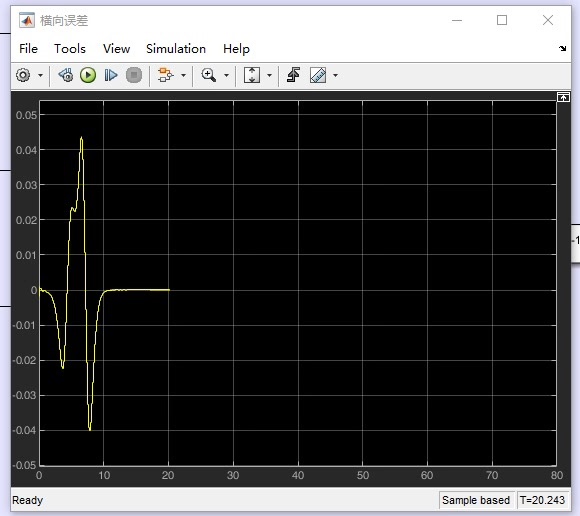
效果如图,几乎0误差,双移线路径误差在0.05m以内。
YID:6835704572222728
xin123


自动驾驶是当今科技领域中备受关注和研究的热点之一。在自动驾驶系统中,路径跟踪算法是实现车辆自动导航的关键技术之一。本文将介绍一种基于运动学模型的LQR算法用于路径跟踪仿真的方法,该方法可以通过结合Matlab和Simulink进行联合仿真,实现精准的路径跟踪控制。
路径跟踪算法是自动驾驶系统中的核心模块之一,其目标是使车辆能够按照给定的路径进行行驶,并保持在预定的道路中。传统的路径跟踪算法通常基于运动学模型和控制理论,其中LQR算法是一种被广泛应用的控制策略之一。它通过设计一个状态反馈控制器,使得车辆能够在动态环境中实现准确的路径跟踪。
在本文的仿真实验中,我们使用Matlab和Simulink工具联合进行仿真。首先,我们建立了车辆的运动学模型,该模型基于车辆的动力学特性,将车辆的运动状态抽象为一组状态变量。然后,我们使用LQR控制策略设计了一个状态反馈控制器,该控制器能够根据车辆当前的状态和目标路径信息,生成控制指令以实现精准的路径跟踪。
在仿真实验中,我们采用了双移线和五次多项式路径作为示例路径进行跟踪。实验结果显示,通过运动学模型实现的LQR横向控制算法能够准确地跟踪给定的路径,并且在跟踪过程中几乎没有误差。双移线路径的跟踪误差在0.05m以内,表明了该算法的高精度性能。
值得注意的是,本文提出的方法还支持自定义路径的跟踪。通过对路径进行参数化表示,可以在仿真中灵活地定义不同形状和特征的路径,并通过LQR控制算法实现车辆的跟踪。这为自动驾驶系统的实际应用提供了更多的灵活性和适应性。
综上所述,本文介绍了基于运动学模型的LQR算法在自动驾驶路径跟踪中的应用。通过联合使用Matlab和Simulink进行仿真,我们展示了这一算法的高精度性能和适应性。未来的研究可以进一步探索基于其他控制策略的路径跟踪算法,并在实际的自动驾驶系统中进行验证和优化。
以上相关代码,程序地址:http://wekup.cn/704572222728.html















 422
422











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









