








 本文记录了通过LQR(Linear Quadratic Regulator)算法设计控制器的过程,旨在实现系统稳定及轨迹跟踪。首先介绍了动机,即通过控制输入调整系统平衡点,确保稳定并达到期望状态。然后详细阐述了状态空间方程的建立和输入设计,最终目标是使特征值实部小于0以实现稳定性。在Simulink中进行了仿真,展示了固定输入和变化输入下的系统响应,强调了轨迹跟踪的挑战及非线性控制的需求。
本文记录了通过LQR(Linear Quadratic Regulator)算法设计控制器的过程,旨在实现系统稳定及轨迹跟踪。首先介绍了动机,即通过控制输入调整系统平衡点,确保稳定并达到期望状态。然后详细阐述了状态空间方程的建立和输入设计,最终目标是使特征值实部小于0以实现稳定性。在Simulink中进行了仿真,展示了固定输入和变化输入下的系统响应,强调了轨迹跟踪的挑战及非线性控制的需求。
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
DR_CAN是我很喜欢的B站博主。本文的图片来自视频的截图。侵删。
DR_CAN出书了,《控制之美》,欢迎大家购书支持。
本文用于记录学习LQR算法的学习过程。
学习资源:【Advanced控制理论】8.5_线性控制器设计_轨迹跟踪(Follow a Desired Path)
【Advanced控制理论】8.5_线性控制器设计_轨迹跟踪(Follow a Desired Path)
一、动机?
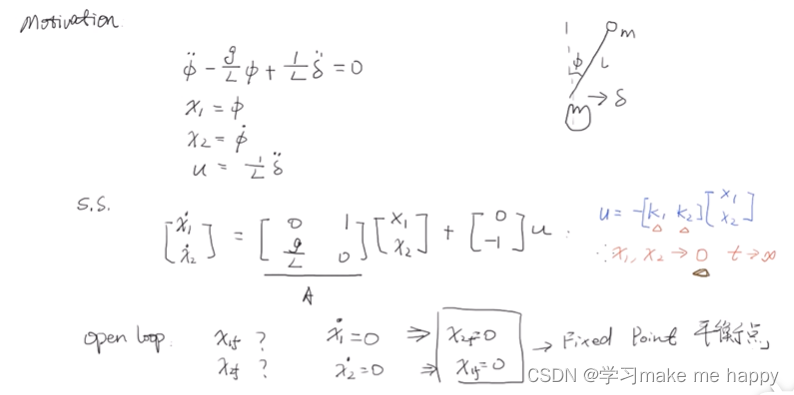
这部分讲的是系统的开环平衡点是(0,0),所以我们可以控制u,使系统收敛于平衡点。
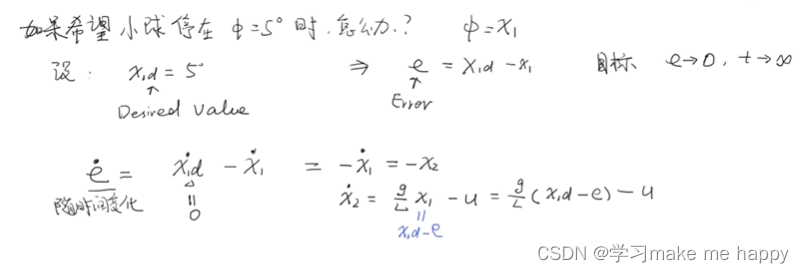

建立了以误差和角速度为状态变量的空间状态方程。此时开环系统的平衡点不是(0,0),所以控制器需要有如下两个作用。
- 稳定系统。没啥说的,控制首先要稳定。
- 调整平衡点。个人理解是准的要求。

对比之前的(0,0)为平衡点的系统,发现多了三角号那一项,所以在输入中想办法抵消掉。所以新的输入如图。

最后,得到的状态空间方程如图。平衡点也是我们期望的。

施加输入后,新的系统的平衡点变为(0,0)。我们控制器设计的第二个目标达成。
然后再让特征值的实部小于0,就可以达到稳定的目的。这里是直接给了-1。
? 这里可以使用cost function来确定特征值吗?
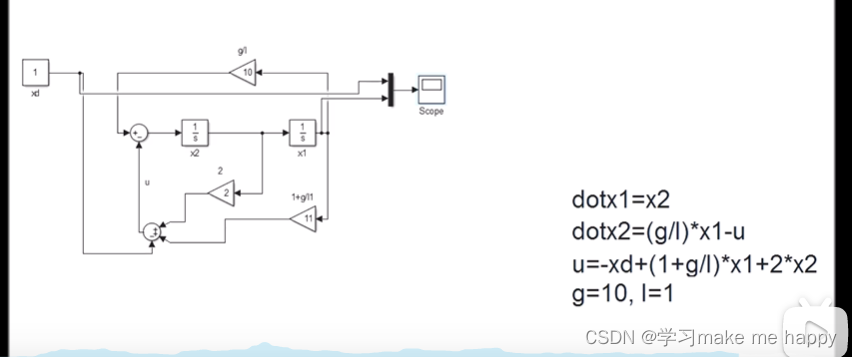
二、simmulink仿真
matlab/simulink仿真
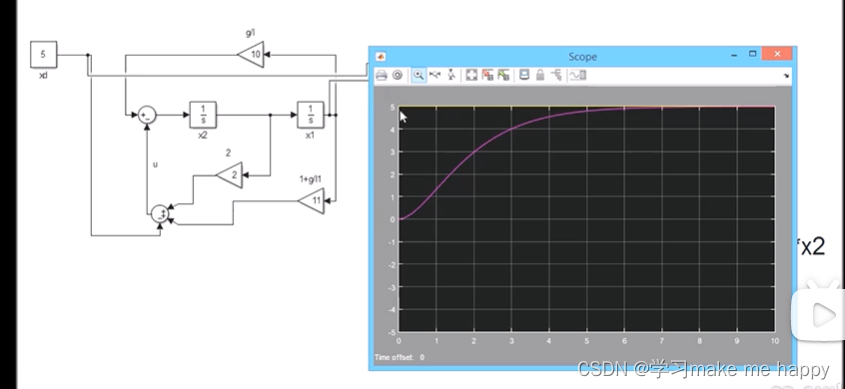
可爱的状态空间方程
如下是上一节的图,可以对比着看一下。
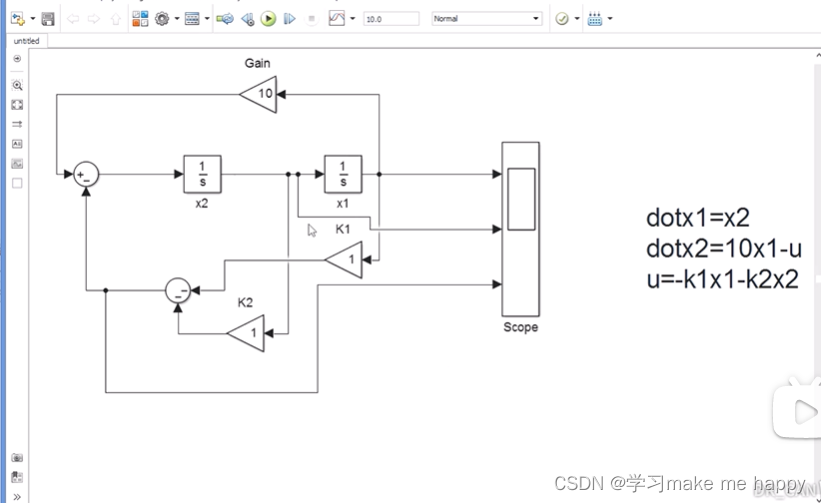
上节内容结束。
输入为固定值时的响应。
为啥本节的主题是轨迹跟踪,给一个变换的输入。
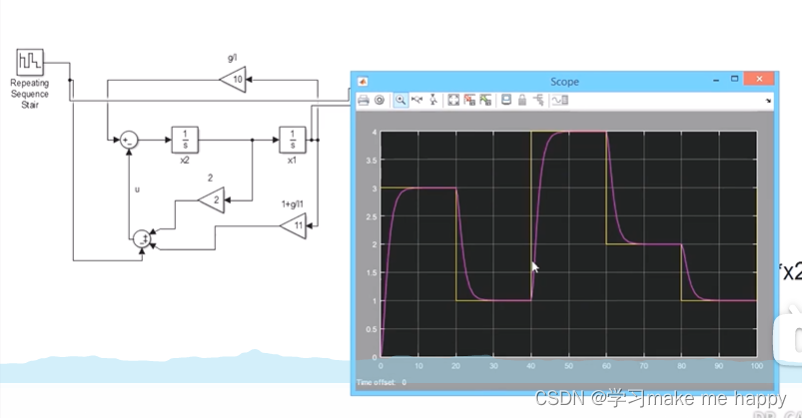
复杂的路线,还需要非线性的控制。<头疼>
总结
感谢DR_CAN提供的讲解。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









