







【window下配置Maxim SDK环境】
1. 前言
MAX78000FTHR为快速开发平台,帮助工程师利用MAX78000 Arm® Cortex® M4F处理器快速实施超低功耗、人工智能(AI)方案,器件集成卷积神经网络加速器。本文为MAX78000羽毛板搭建window开发环境。
- 下图为板载资源
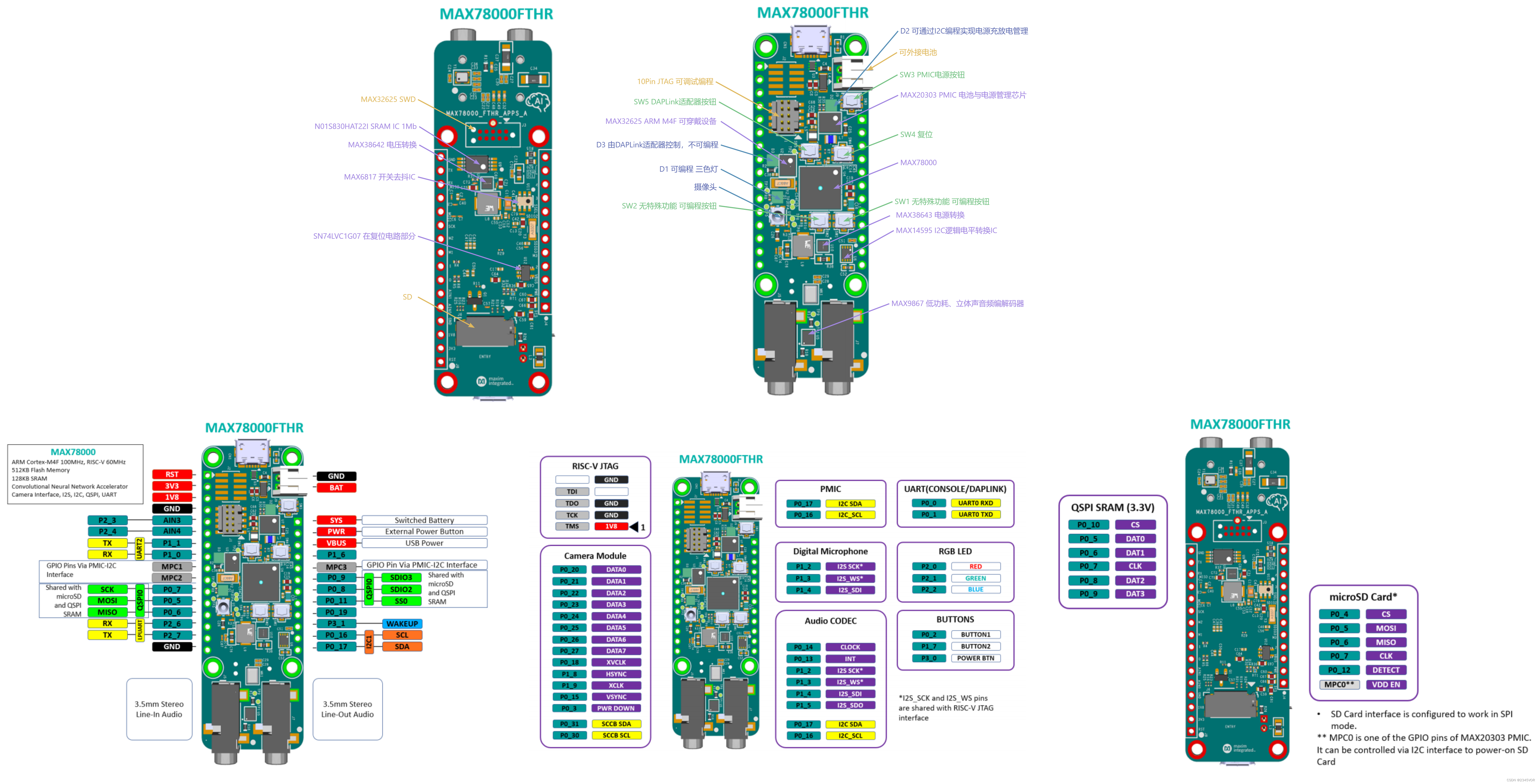
具体硬件介绍见
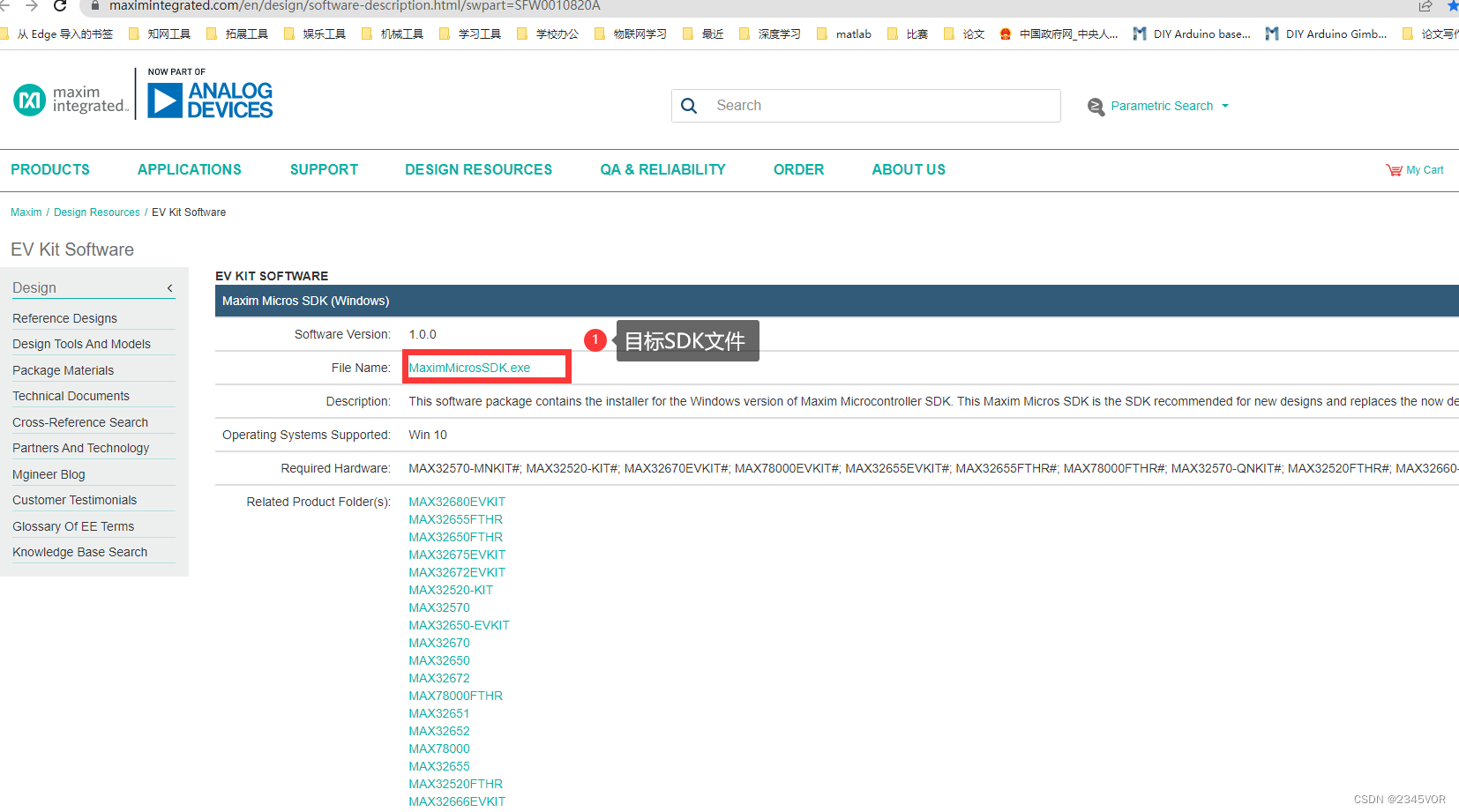
2. Maxim SDK下载
🥳🥳🥳温馨提示:接下来需要安全上网,否则一定会失败哟!
官网地址:https://www.maximintegrated.com/en/design/software-description.html/swpart=SFW0010820A
3. Maxim SDK安装
3.1 安装详解
- 下载完成后,双击安装
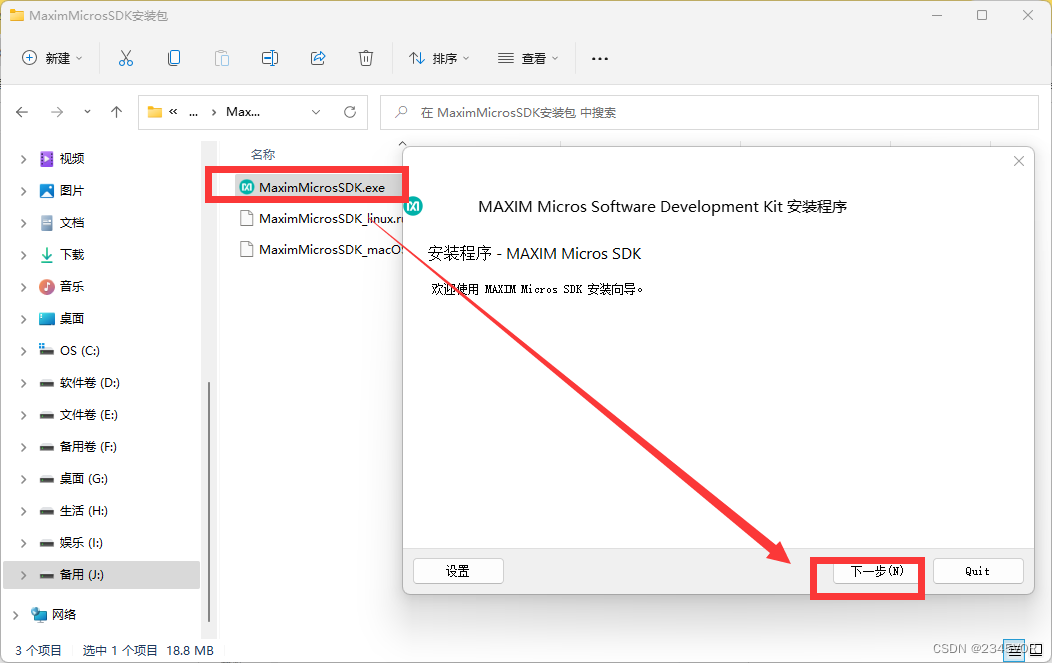
- 看到上面的提示点击下一步
- 此过程需要远程连接maxin官网,一定要安全上网
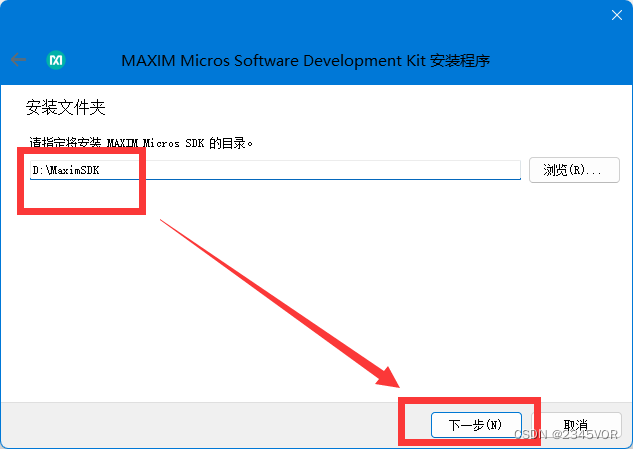
- 修改安装位置,下一步
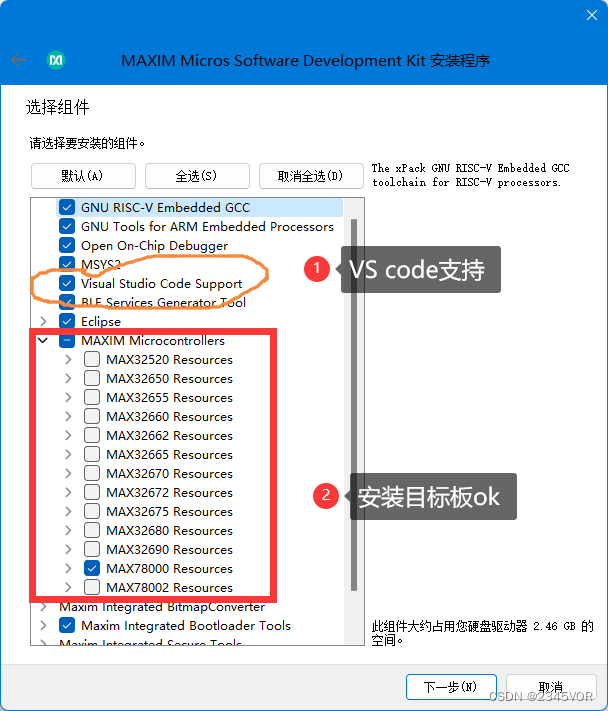
- 勾选VS code支持,只选择MAX7800,下一步
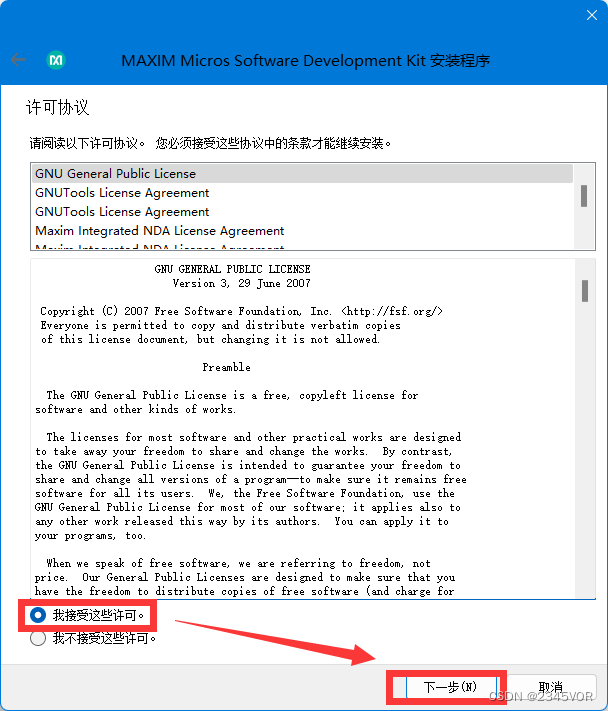
- 接受许可,下一步
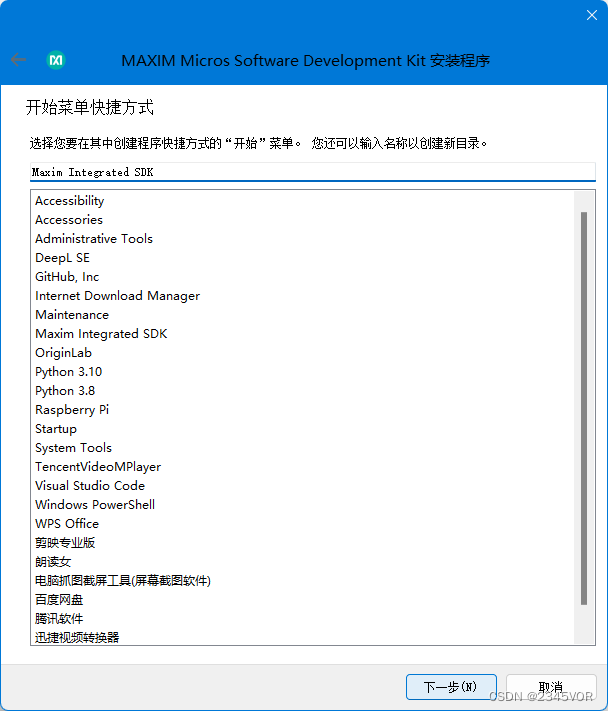
- 默认下一步
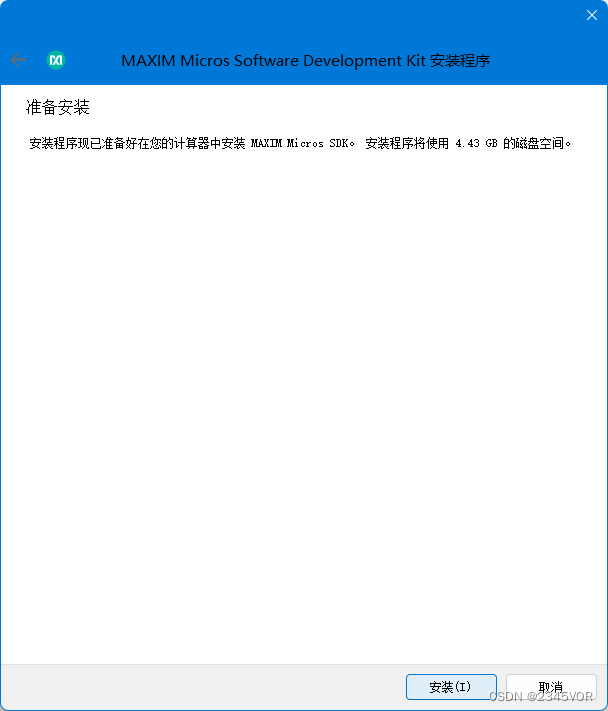
- 需要4.43GB,点击安装
静静需要20分钟左右,可以去喝杯咖啡,也不介意你打赏一下小弟,请我喝杯咖啡,下面有交流群,可以相互问问题哟!
💖💖💖
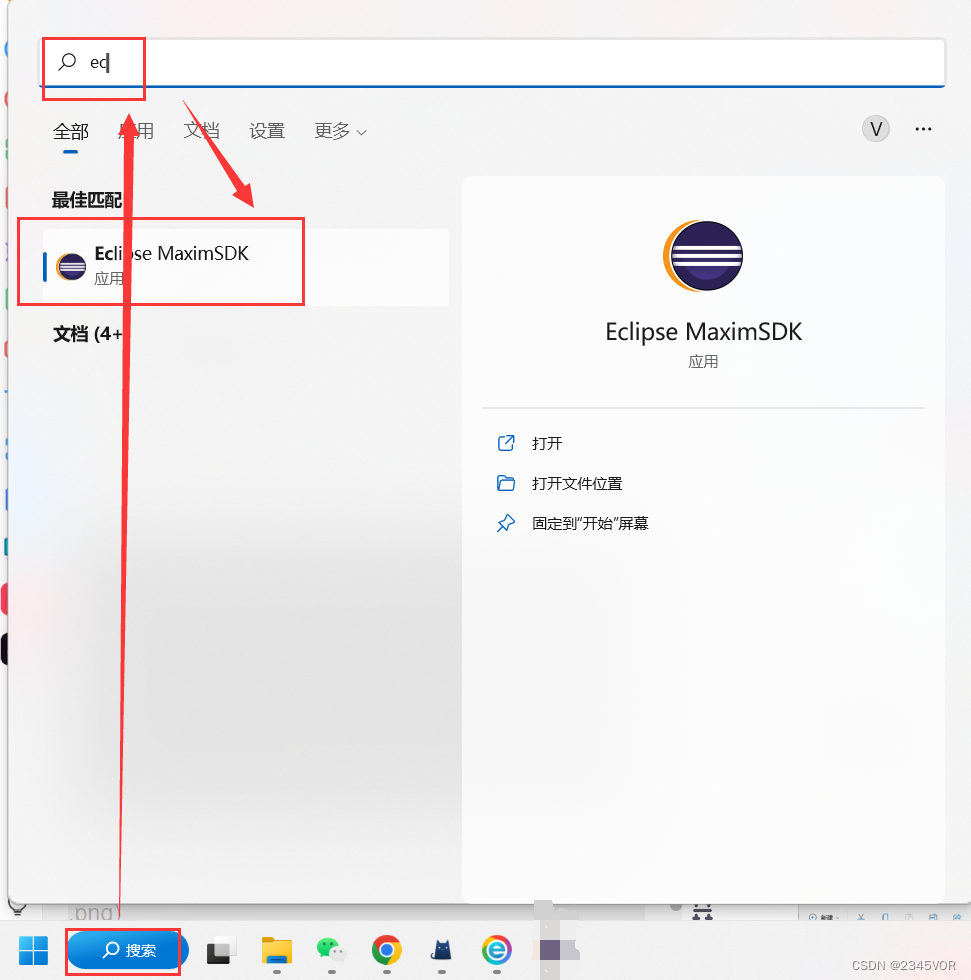
3.2 安装完成

在搜索栏中找到这全家桶,
- Eclipse就是🎏调试编译下载🎏全覆盖的UI编程软件;
- Maxim就是🎏辅助下载🎏的软件;
- MinGW就是命令行方式的🎏编译下载🎏的软件;
4. 测试环境
4.1 新建Hello word demo
- 点击Eclipse,这个是检查更新,不急
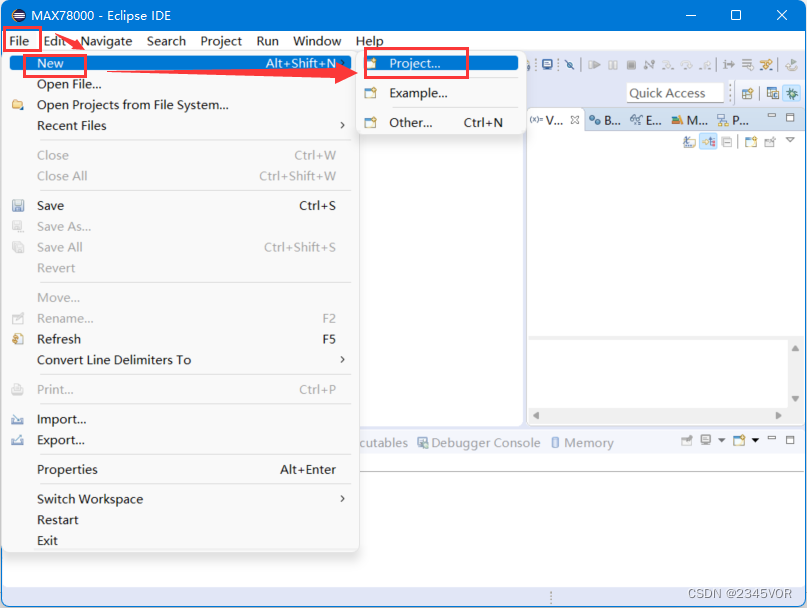
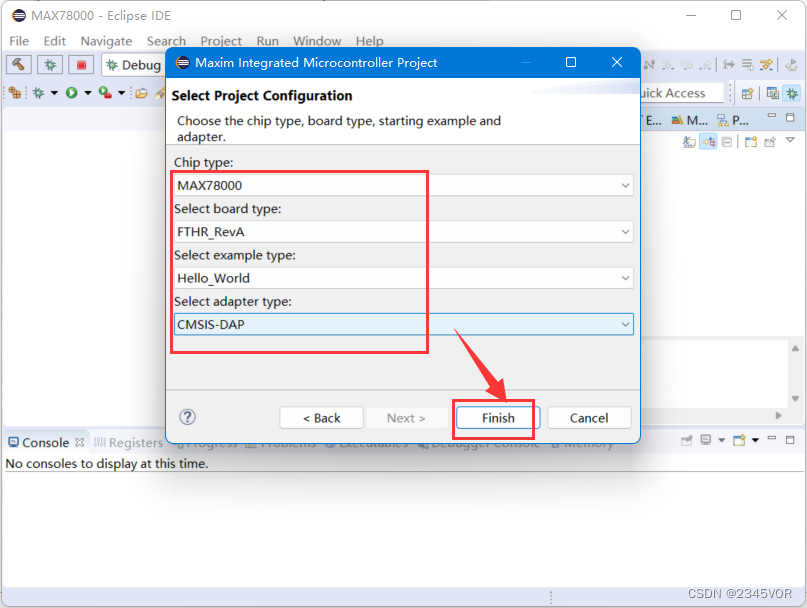
- 新建一个demo,file>new>Project
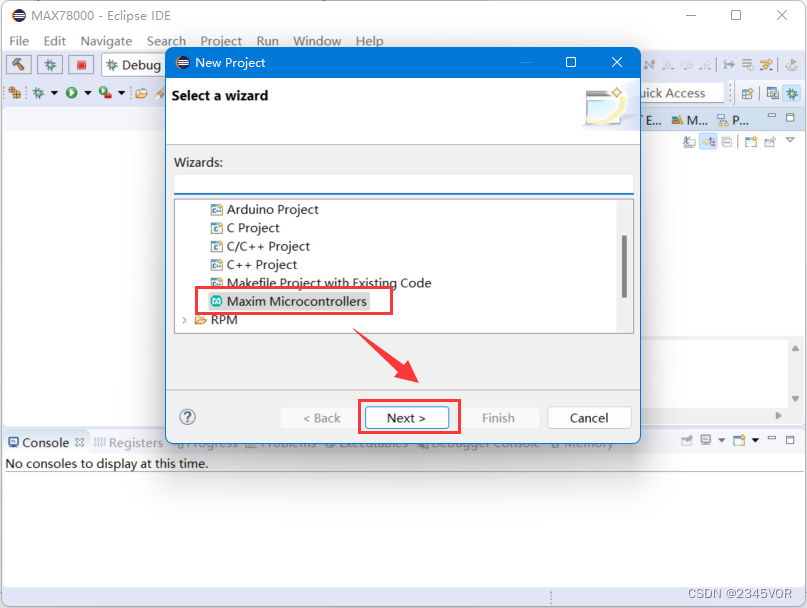
- 选择Maxim Microcontrollers,下一步
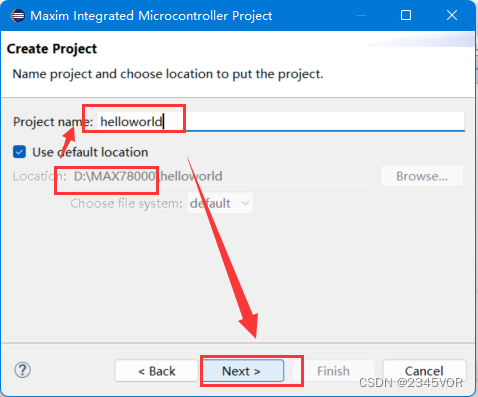
- 配置默认工作位置,首先helloworld吧,下一步
- 按照我的配置就好,finish
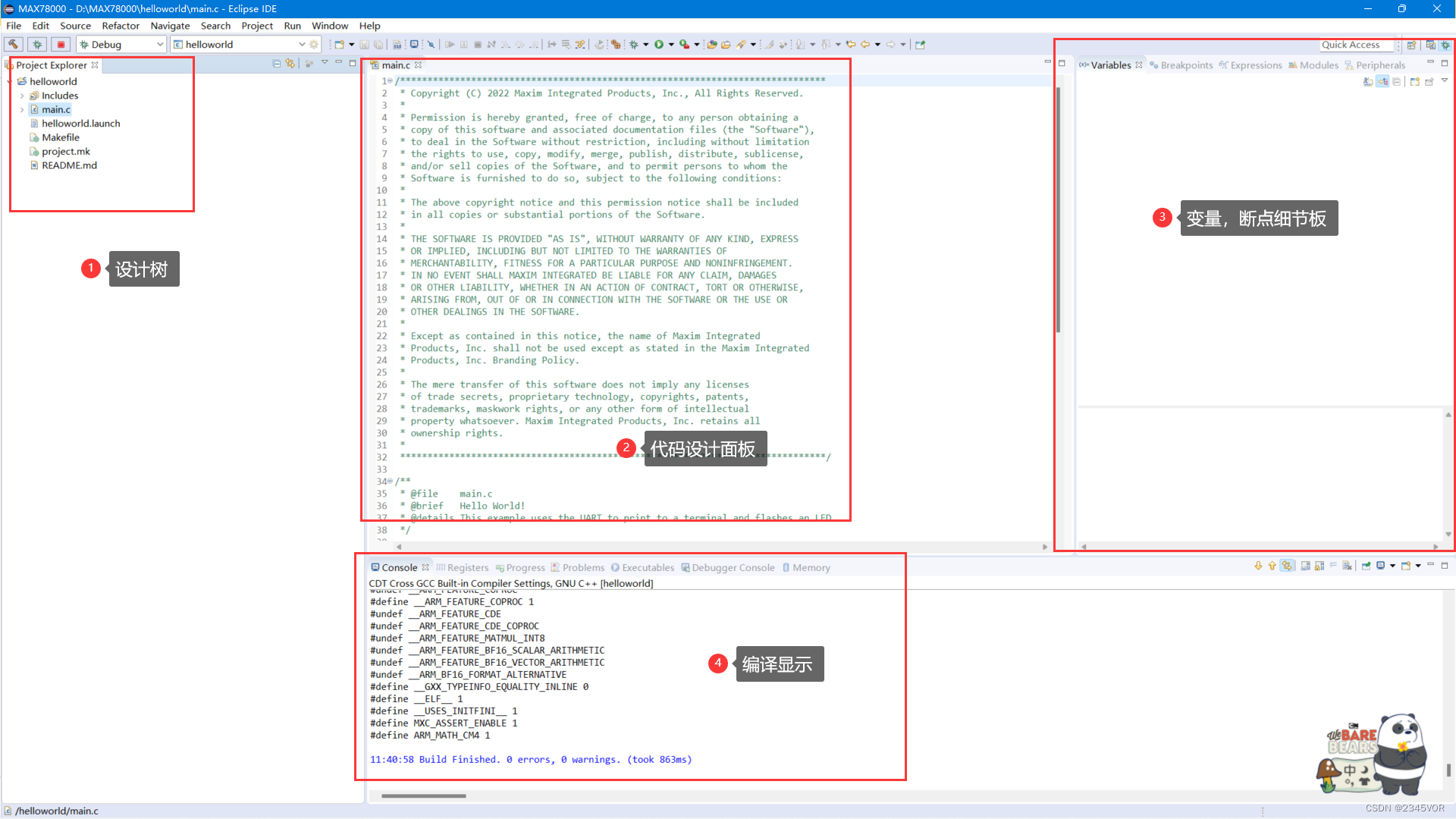
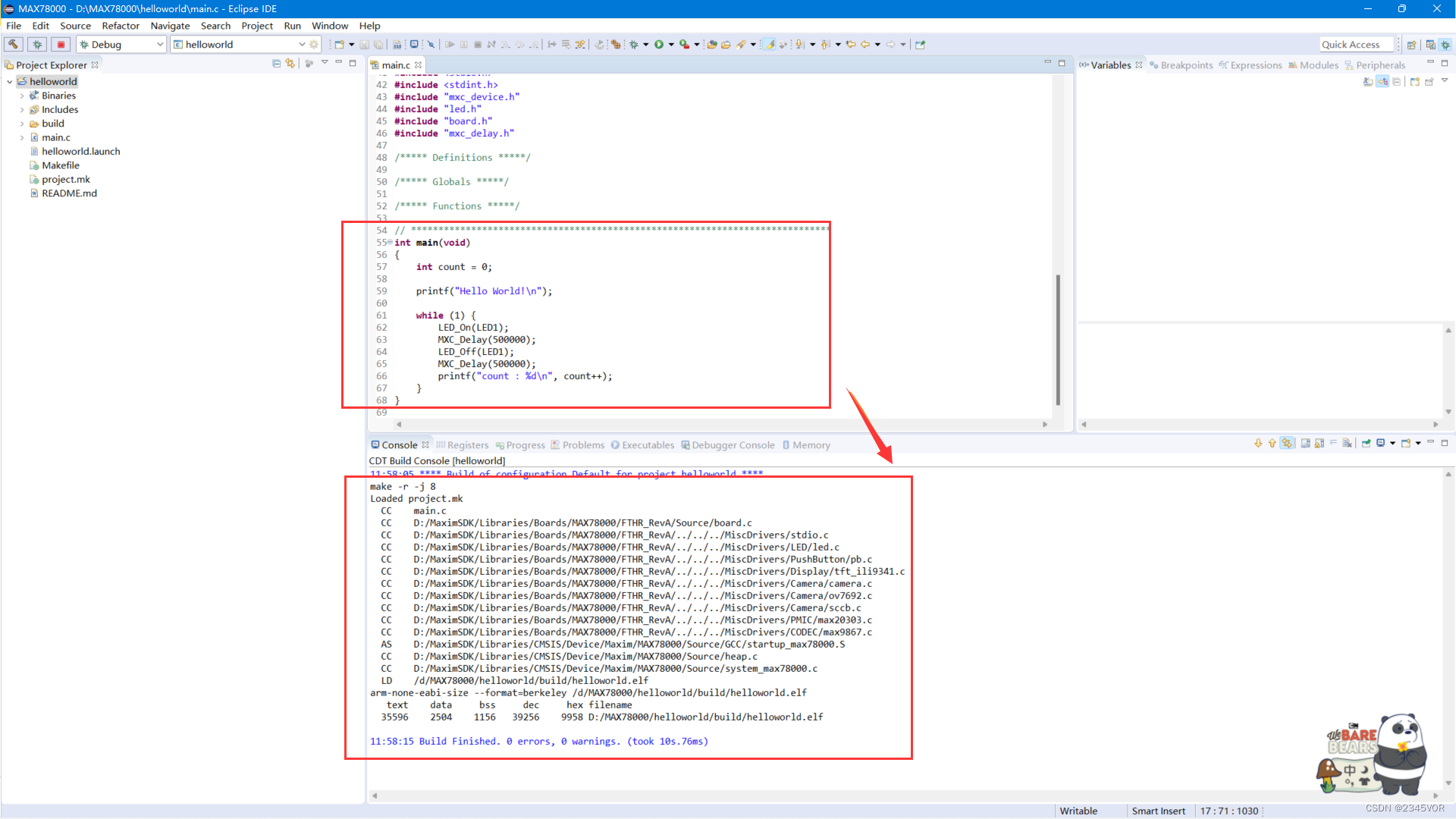
- 打开Helloword demo如下
main.c
/******************************************************************************
* Copyright (C) 2022 Maxim Integrated Products, Inc., All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a
* copy of this software and associated documentation files (the "Software"),
* to deal in the Software without restriction, including without limitation
* the rights to use, copy, modify, merge, publish, distribute, sublicense,
* and/or sell copies of the Software, and to permit persons to whom the
* Software is furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included
* in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS
* OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF
* MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT.
* IN NO EVENT SHALL MAXIM INTEGRATED BE LIABLE FOR ANY CLAIM, DAMAGES
* OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE,
* ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
* OTHER DEALINGS IN THE SOFTWARE.
*
* Except as contained in this notice, the name of Maxim Integrated
* Products, Inc. shall not be used except as stated in the Maxim Integrated
* Products, Inc. Branding Policy.
*
* The mere transfer of this software does not imply any licenses
* of trade secrets, proprietary technology, copyrights, patents,
* trademarks, maskwork rights, or any other form of intellectual
* property whatsoever. Maxim Integrated Products, Inc. retains all
* ownership rights.
*
******************************************************************************/
/**
* @file main.c
* @brief Hello World!
* @details This example uses the UART to print to a terminal and flashes an LED.
*/
/***** Includes *****/
#include <stdio.h>
#include <stdint.h>
#include "mxc_device.h"
#include "led.h"
#include "board.h"
#include "mxc_delay.h"
/***** Definitions *****/
/***** Globals *****/
/***** Functions *****/
// *****************************************************************************
int main(void)
{
int count = 0;
printf("Hello World!\n");
while (1) {
LED_On(LED1);
MXC_Delay(500000);
LED_Off(LED1);
MXC_Delay(500000);
printf("count : %d\n", count++);
}
}
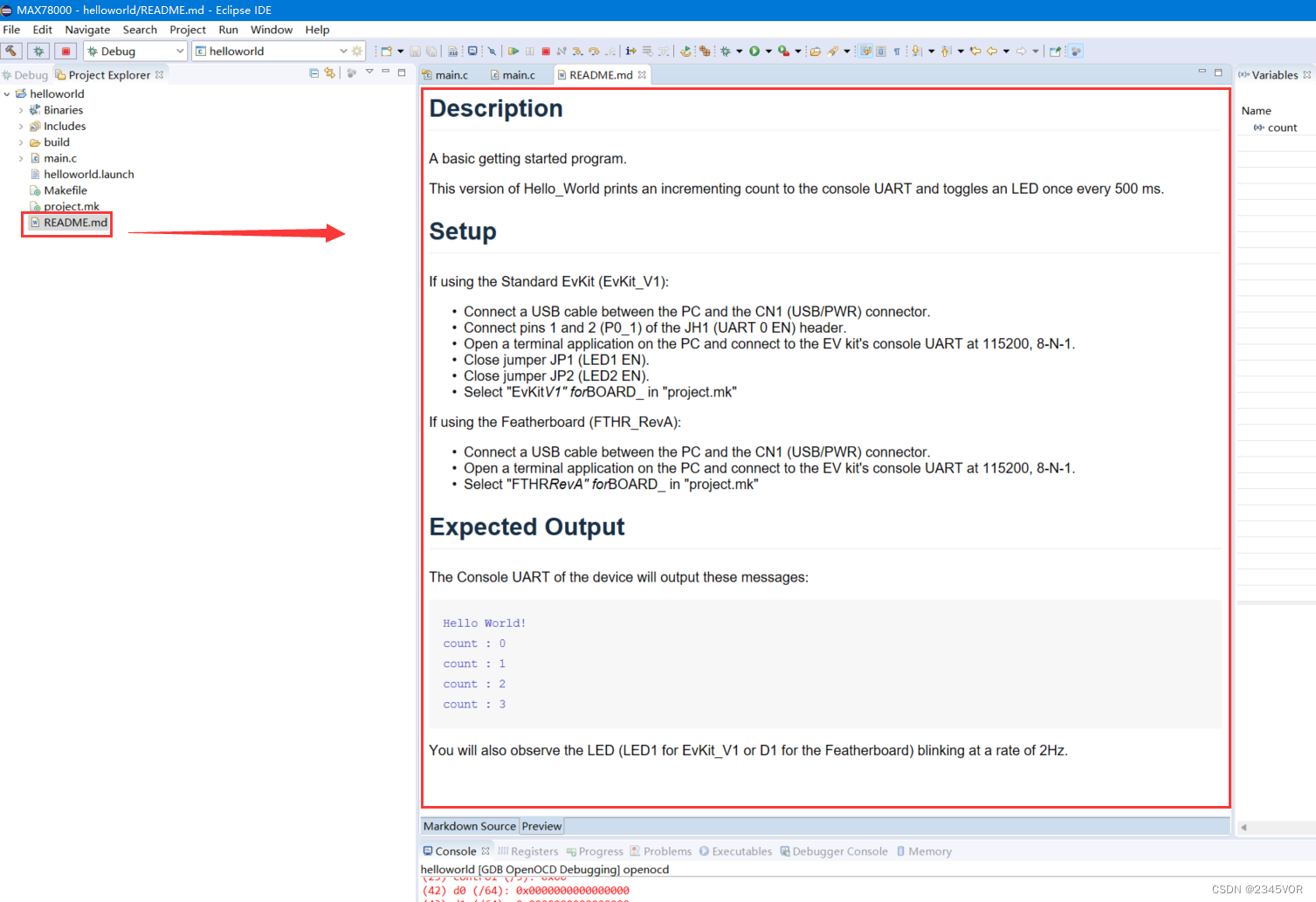
- 大家插入系统demo可以看看readme.md,分别实验验证
4.2 编译调试下载
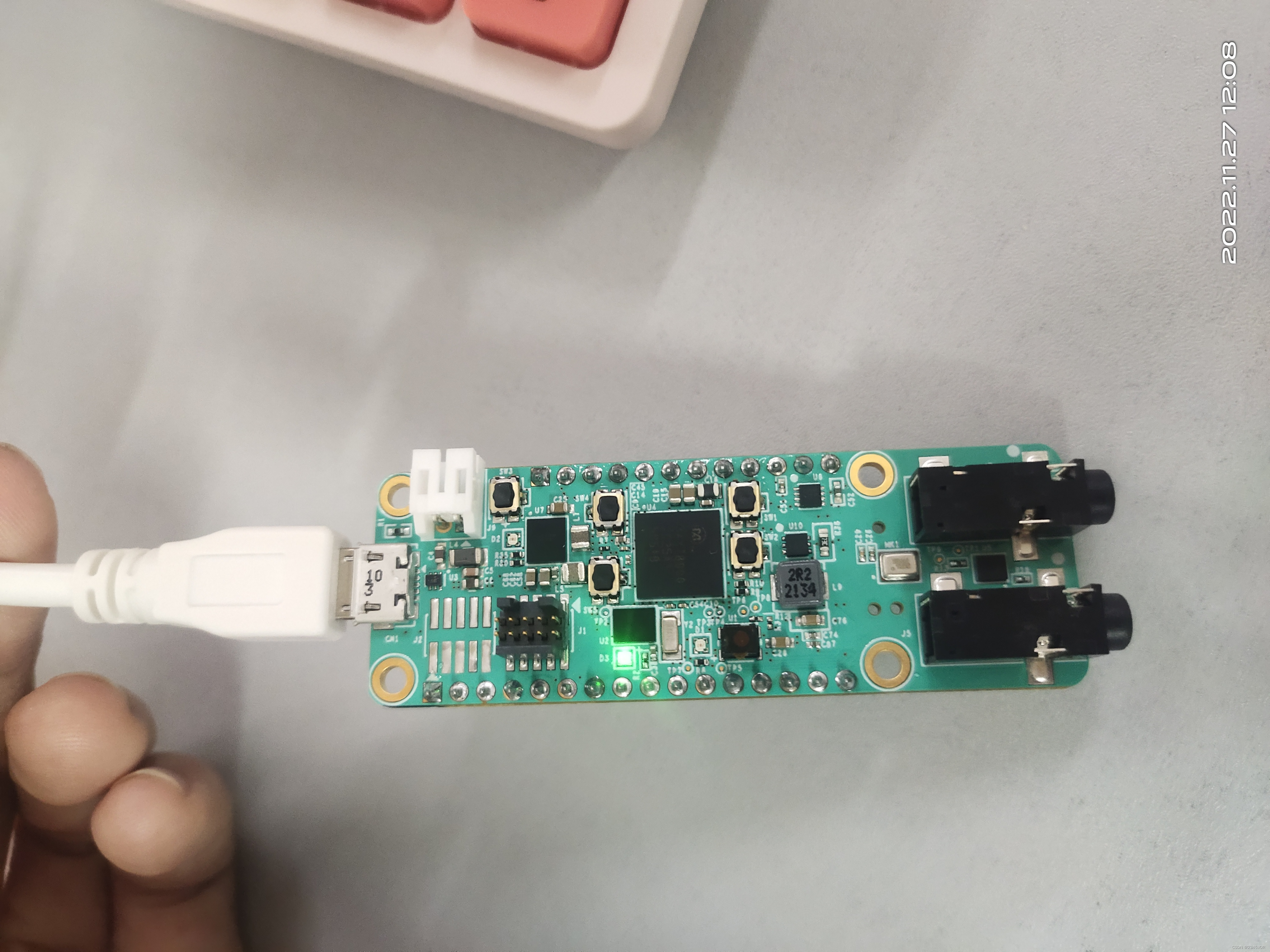
- 将Maxim通过安卓数据线连接到电脑上
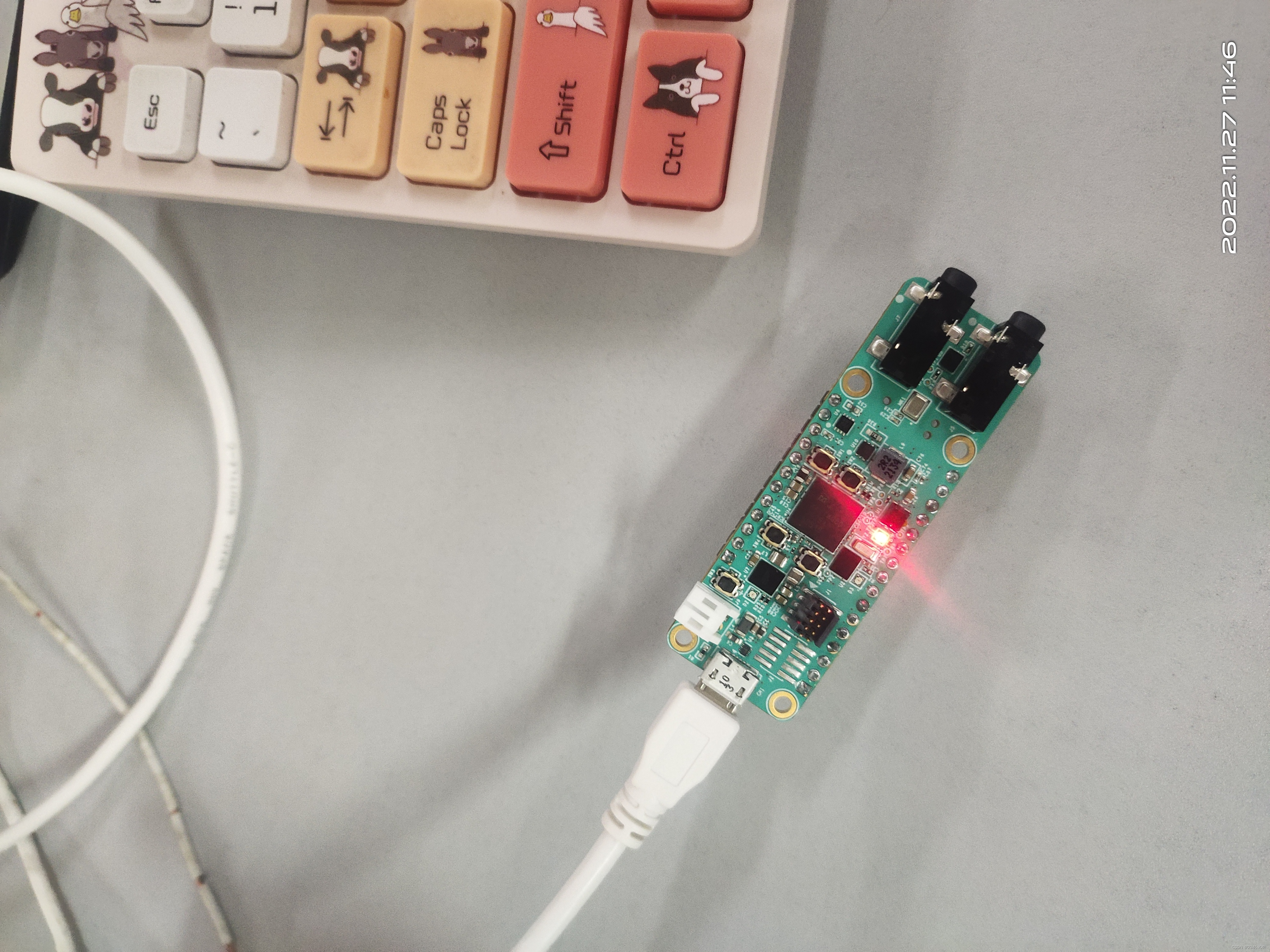
- 连接正常会出现DAPLINK 的U盘,如下查看
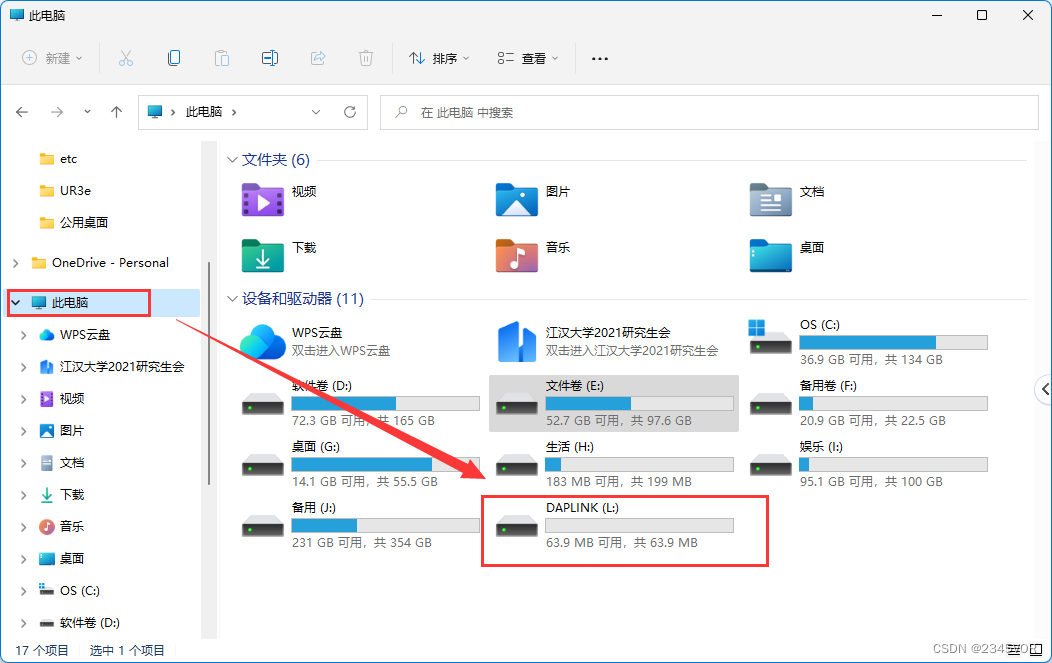
如果故障了,可参照官网刷固件还原!
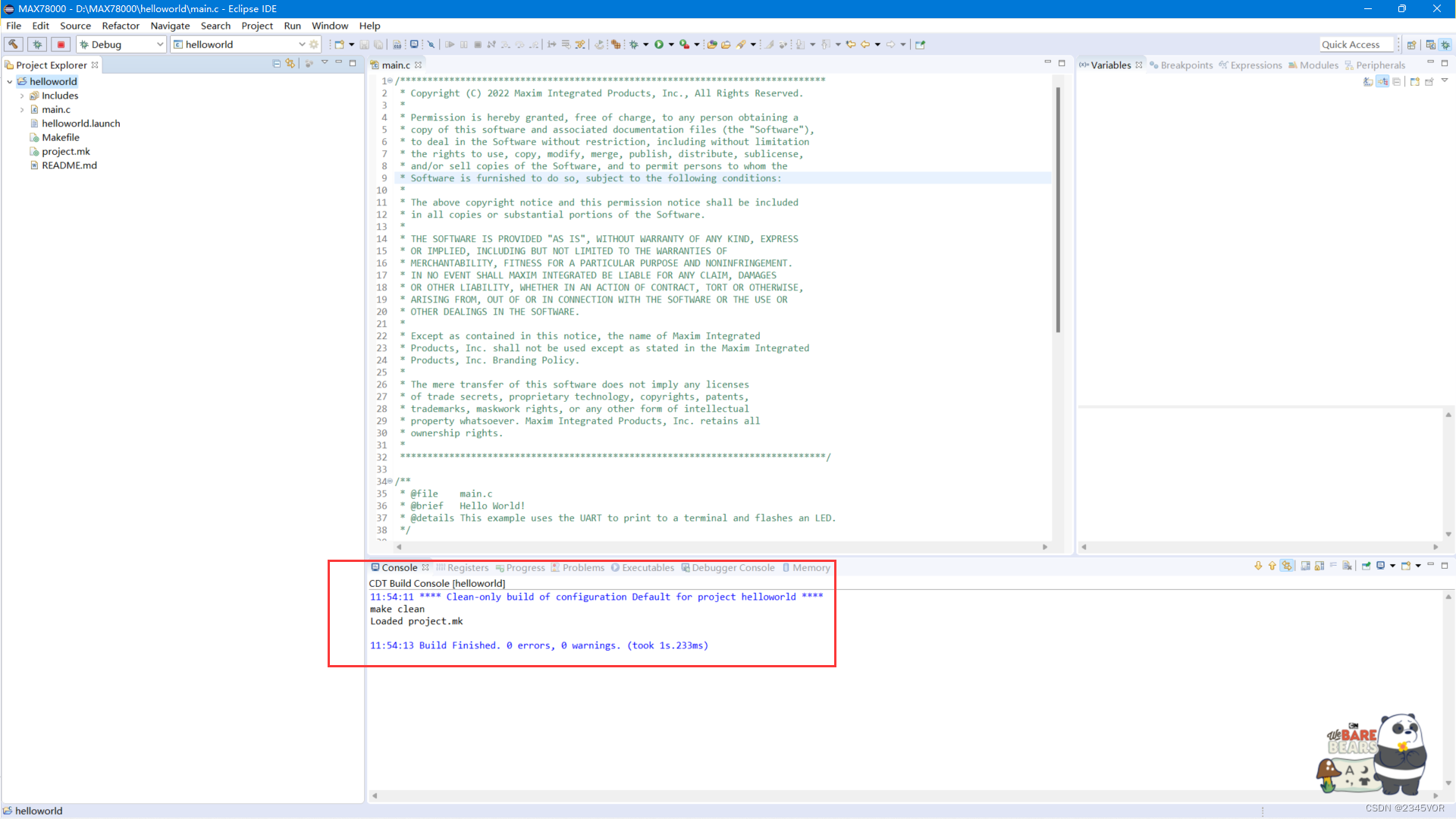
4.2.1 clean
-
鼠标右键项目,点击
clean project,清除原有编译结果(clean)
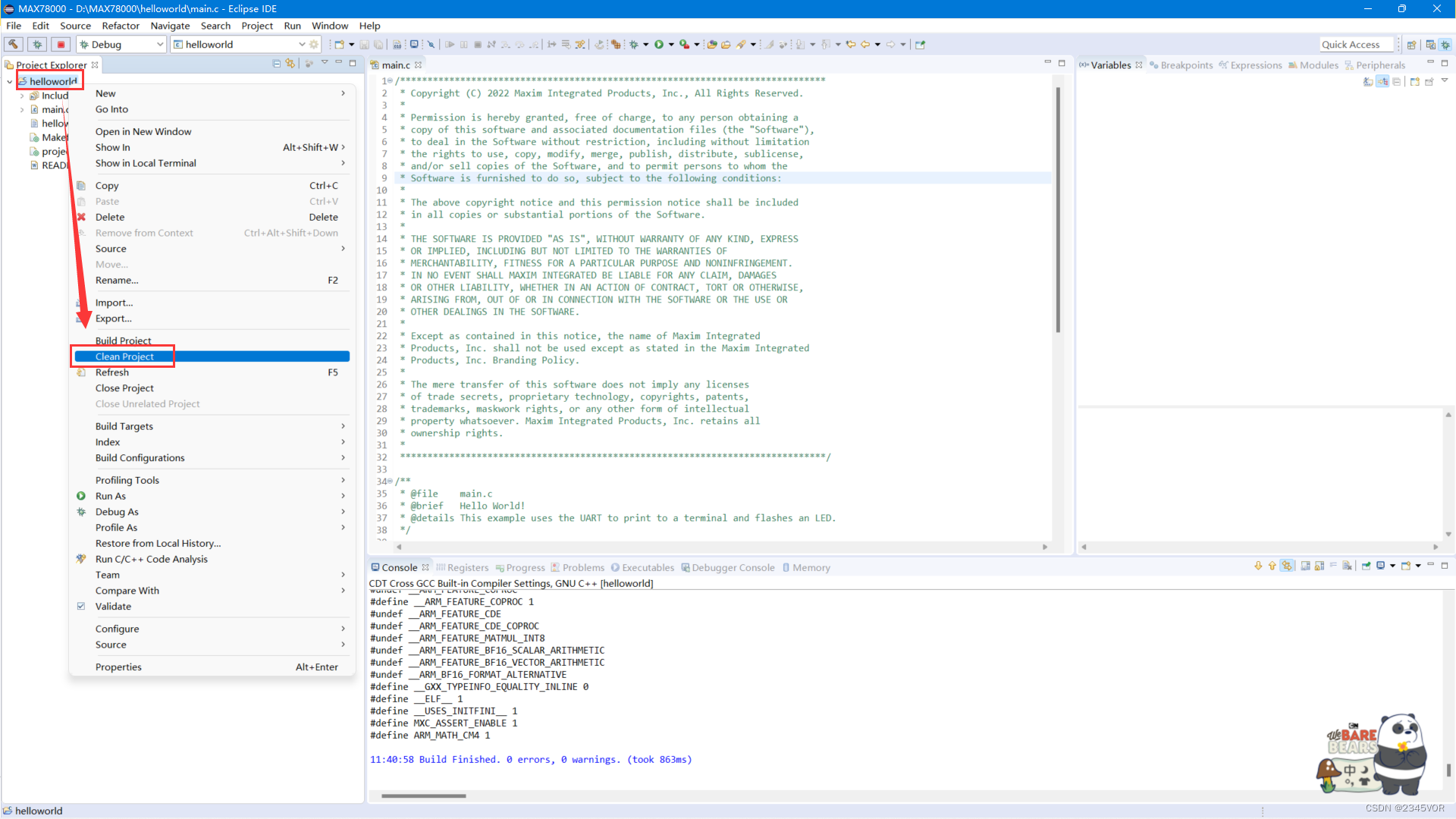
-
显示清除成功
4.2.2 build
- 鼠标右键项目,点击
build project,编译项目(build)
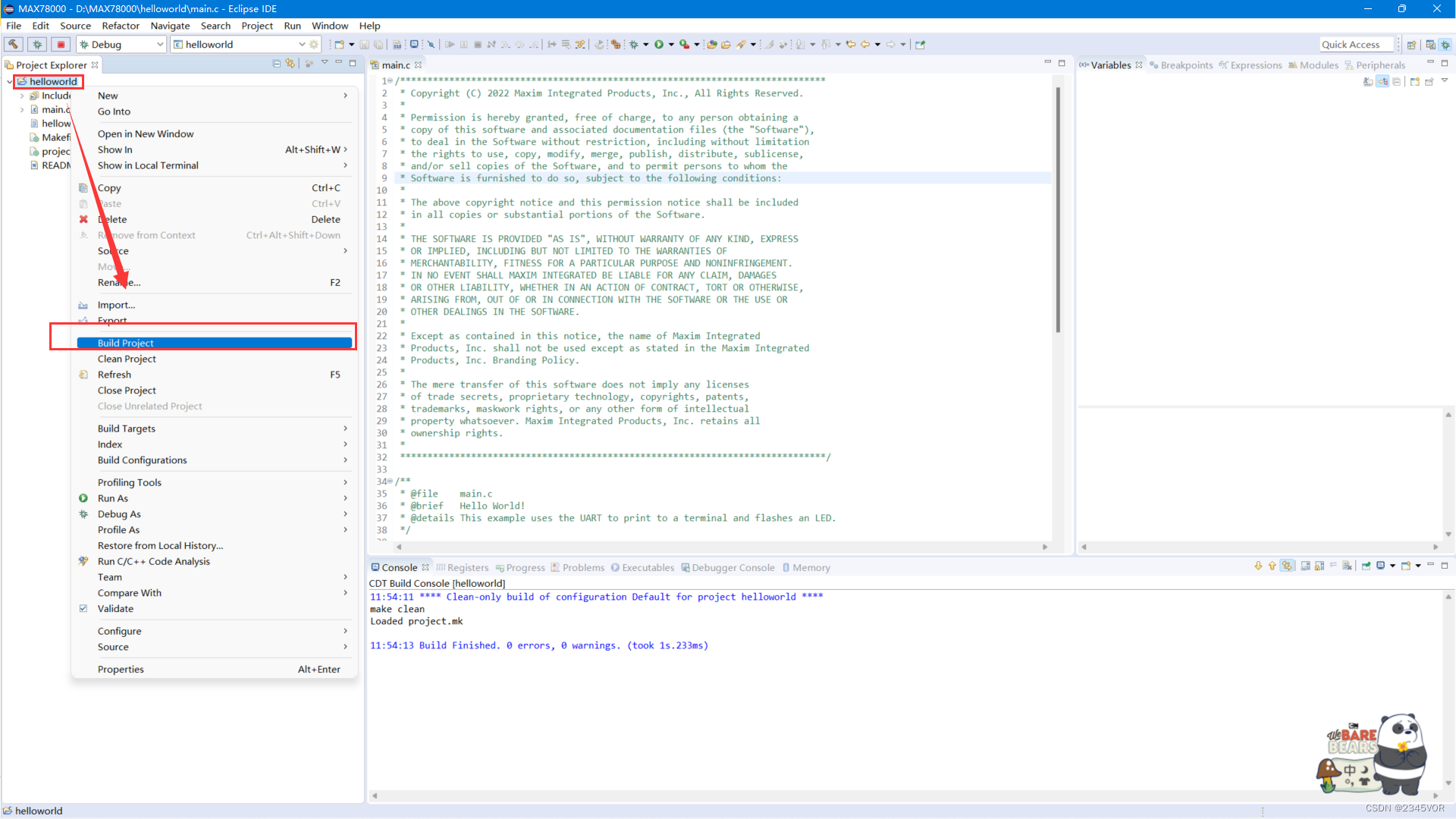
- 呼吸灯,打印
Hello World!程序,生成elf为编译成功
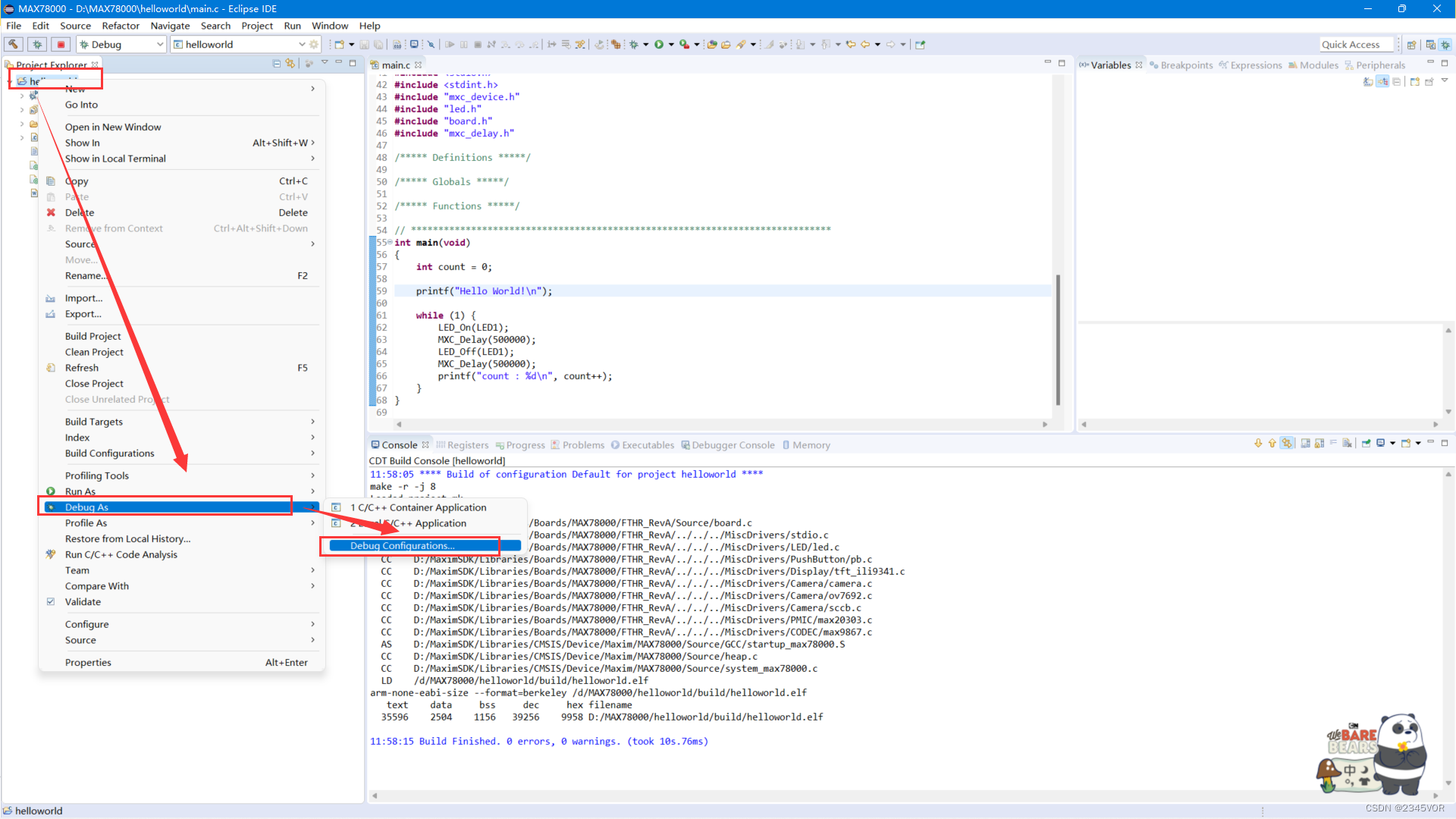
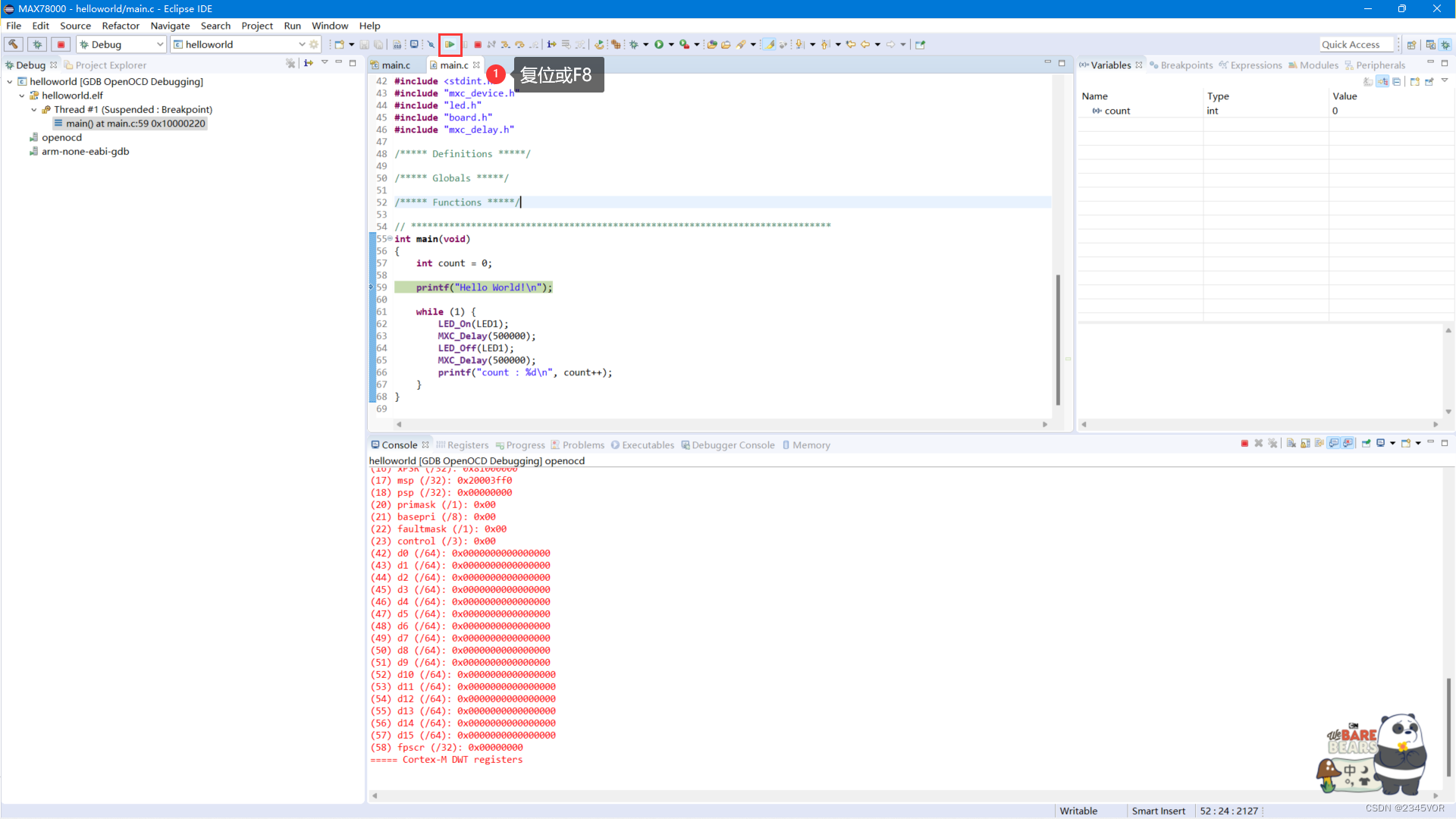
4.2.3 Openocd
现在下载程序,采用Openocd
- 鼠标右键项目,点击
Debug as,选择Debug configurations(Debug)
- 选择
GDB Openocd Debugging下的Helloworld,点击Debug就开始下载程序啦!
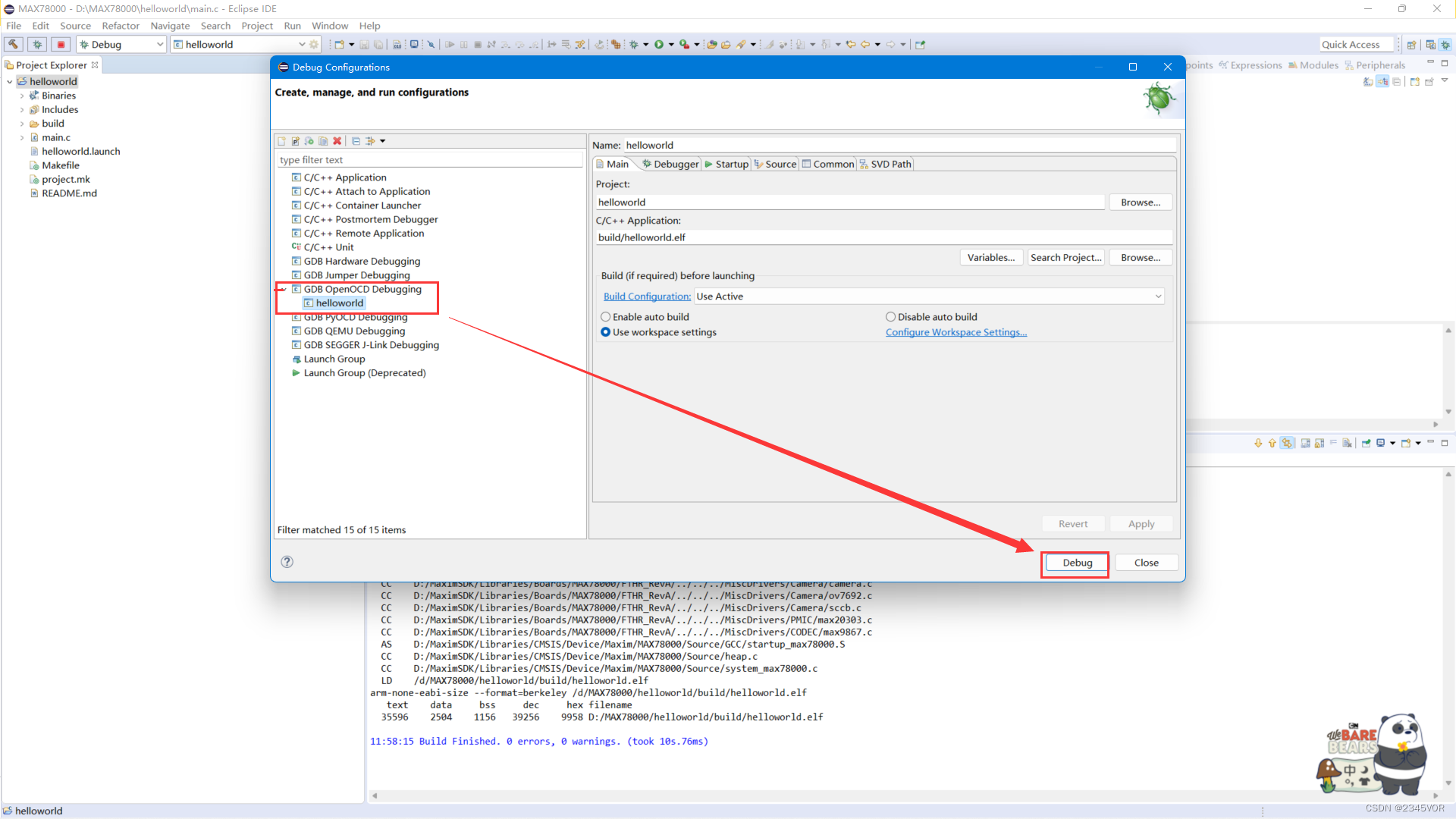
打印如下,就下载成功啦!
Open On-Chip Debugger 0.11.0+dev-g56a818e4c (2022-11-16-05:46)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
DEPRECATED! use 'adapter driver' not 'interface'
Started by GNU MCU Eclipse
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : CMSIS-DAP: SWD supported
Info : CMSIS-DAP: Atomic commands supported
Info : CMSIS-DAP: FW Version = 0254
Info : CMSIS-DAP: Serial# = 04440001405d035900000000000000000000000097969906
Info : CMSIS-DAP: Interface Initialised (SWD)
Info : SWCLK/TCK = 1 SWDIO/TMS = 1 TDI = 0 TDO = 0 nTRST = 0 nRESET = 1
Info : CMSIS-DAP: Interface ready
Info : clock speed 2000 kHz
Info : SWD DPIDR 0x2ba01477
Info : max32xxx.cpu: Cortex-M4 r0p1 processor detected
Info : max32xxx.cpu: target has 6 breakpoints, 4 watchpoints
Info : max32xxx.cpu: external reset detected
Info : starting gdb server for max32xxx.cpu on 3333
Info : Listening on port 3333 for gdb connections
Info : accepting 'gdb' connection on tcp/3333
target halted due to debug-request, current mode: Thread
xPSR: 0x21030000 pc: 0x10002524 msp: 0x2001ffc0
Warn : Prefer GDB command "target extended-remote :3333" instead of "target remote :3333"
Info : SWD DPIDR 0x2ba01477
target halted due to debug-request, current mode: Thread
xPSR: 0x81000000 pc: 0x00002124 msp: 0x20003ff0
Info : SWD DPIDR 0x2ba01477
target halted due to debug-request, current mode: Thread
xPSR: 0x81000000 pc: 0x00002124 msp: 0x20003ff0
Info : Padding image section 0 at 0x10008b04 with 12 bytes
Info : SWD DPIDR 0x2ba01477
target halted due to debug-request, current mode: Thread
xPSR: 0x81000000 pc: 0x00002124 msp: 0x20003ff0
===== arm v7m registers
(0) r0 (/32): 0x10000000
(1) r1 (/32): 0xe000ed08
(2) r2 (/32): 0x00000001
(3) r3 (/32): 0x40000000
(4) r4 (/32): 0x00000000
(5) r5 (/32): 0x00000000
(6) r6 (/32): 0x00000000
(7) r7 (/32): 0x00000000
(8) r8 (/32): 0x00000000
(9) r9 (/32): 0x00000000
(10) r10 (/32): 0x00000000
(11) r11 (/32): 0x00000000
(12) r12 (/32): 0x20003fc8
(13) sp (/32): 0x20003ff0
(14) lr (/32): 0x0000211d
(15) pc (/32): 0x100004b4 (dirty)
(16) xPSR (/32): 0x81000000
(17) msp (/32): 0x20003ff0
(18) psp (/32): 0x00000000
(20) primask (/1): 0x00
(21) basepri (/8): 0x00
(22) faultmask (/1): 0x00
(23) control (/3): 0x00
(42) d0 (/64): 0x0000000000000000
(43) d1 (/64): 0x0000000000000000
(44) d2 (/64): 0x0000000000000000
(45) d3 (/64): 0x0000000000000000
(46) d4 (/64): 0x0000000000000000
(47) d5 (/64): 0x0000000000000000
(48) d6 (/64): 0x0000000000000000
(49) d7 (/64): 0x0000000000000000
(50) d8 (/64): 0x0000000000000000
(51) d9 (/64): 0x0000000000000000
(52) d10 (/64): 0x0000000000000000
(53) d11 (/64): 0x0000000000000000
(54) d12 (/64): 0x0000000000000000
(55) d13 (/64): 0x0000000000000000
(56) d14 (/64): 0x0000000000000000
(57) d15 (/64): 0x0000000000000000
(58) fpscr (/32): 0x00000000
===== Cortex-M DWT registers
5. 实验效果
- 此时板载绿灯一直闪烁,
- 复位或者F8开始运行程序
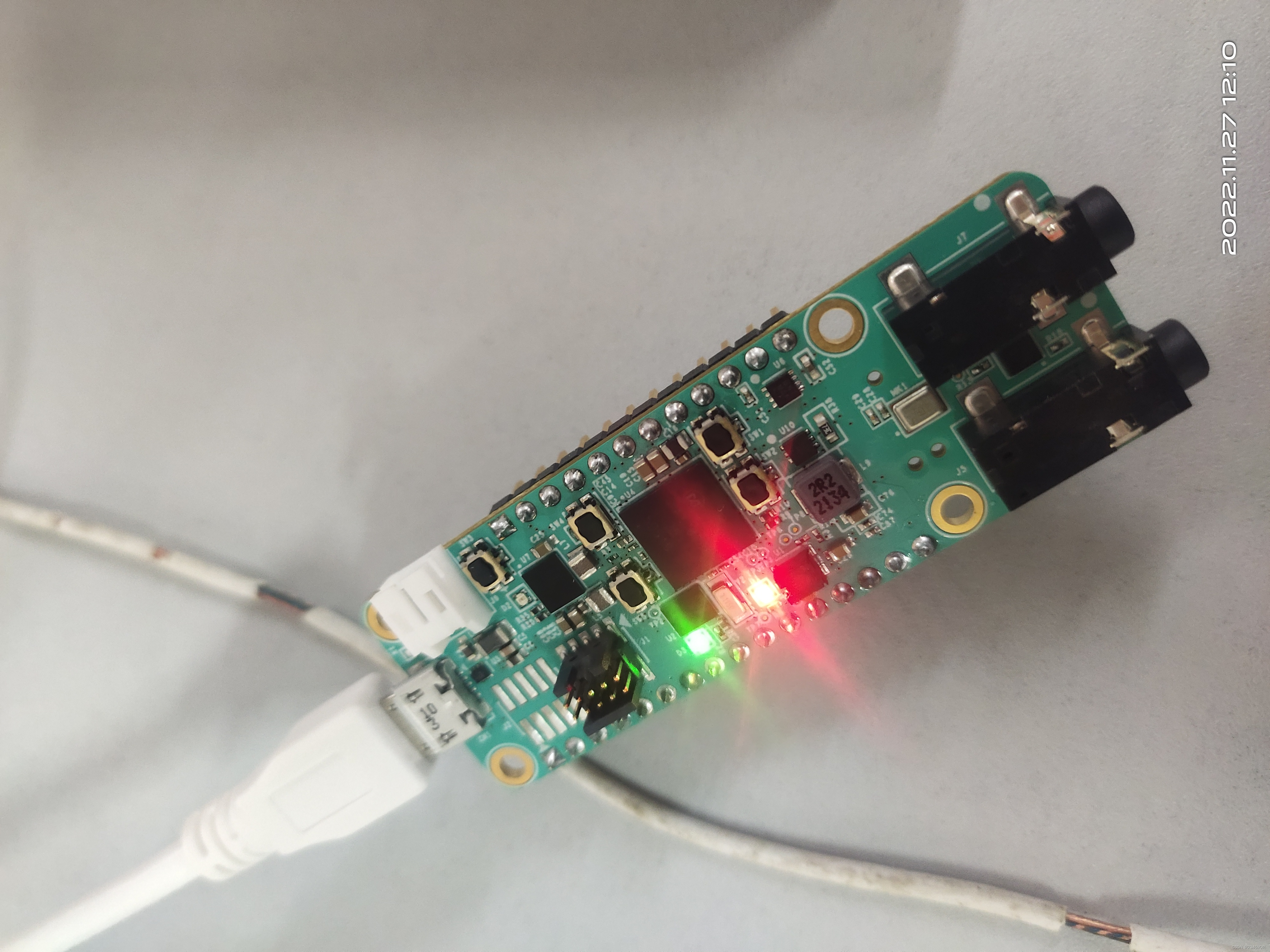
- 打开串口调试助手,我用的Serial studio,设置好115200波特率,选择端口连接,调试如下

6.小结
通过对这篇文章我们掌握了window下配置Maxim SDK环境,接下来会有许多有趣的实验,尝试与Arduino通讯做语音小车,进而丰富我们的生活。🛹🛹🛹从而实现对外部世界进行感知,充分认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。🤣🤣🤣
🥳🥳🥳再次非常感谢大赛支持和胡同学🥳🥳🥳
参考文献:
window10下配置Maxim SDK
数据手册
MAX78000板卡项目汇总
应用笔记



















 5120
5120

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











