






感应异步电机的无传感器矢量控制,完整的C代码+仿真模型:
1. 基于“电压模型+电流模型”的磁链观测器,实现转子磁场定向控制(FOC),可实现电机在低速、中高速段的高精度的转速估算;
代码已经成功移植到DSP芯片(TMS320F28335)和STM32中,对一台额定功率为33kW的异步电机进行了无传感器矢量控制,波形和试验台架数据见下图。
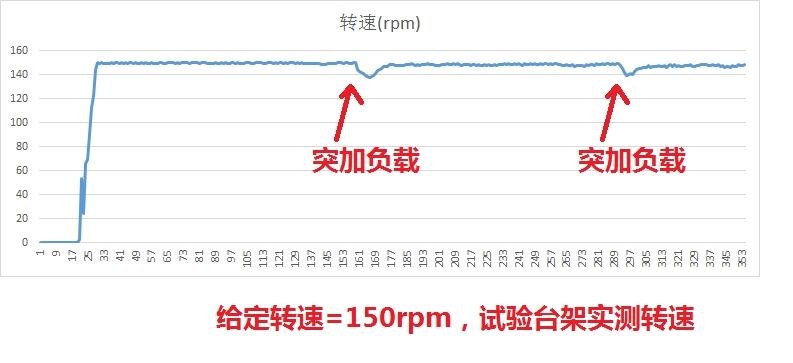
2. 可实现电机带满载零速启动,抗负载扰动性强,响应速度快,控制精度高;
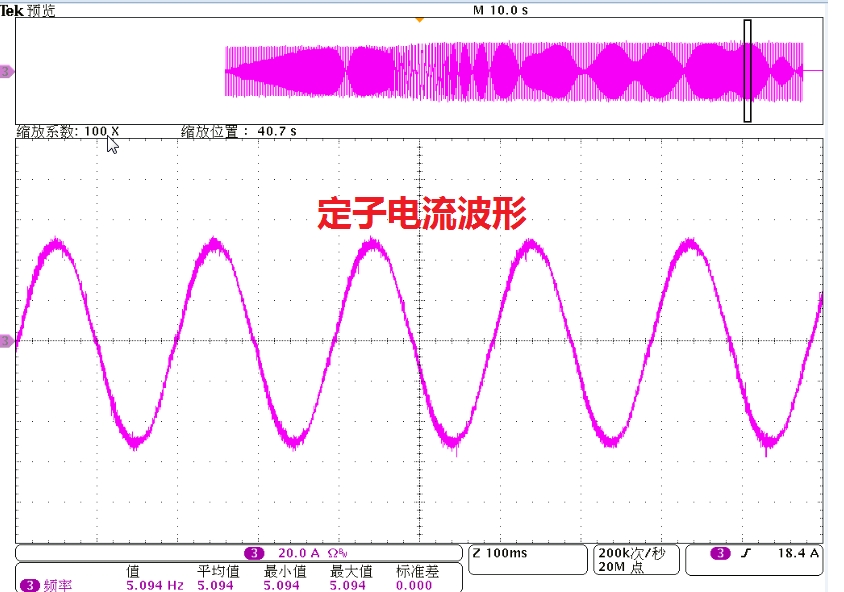
3. SVPWM空间电压矢量调制,定子电流波形的畸变率低;
4.采用S-Function的方式,把C代码直接在simulink下进行仿真,所见即所得!
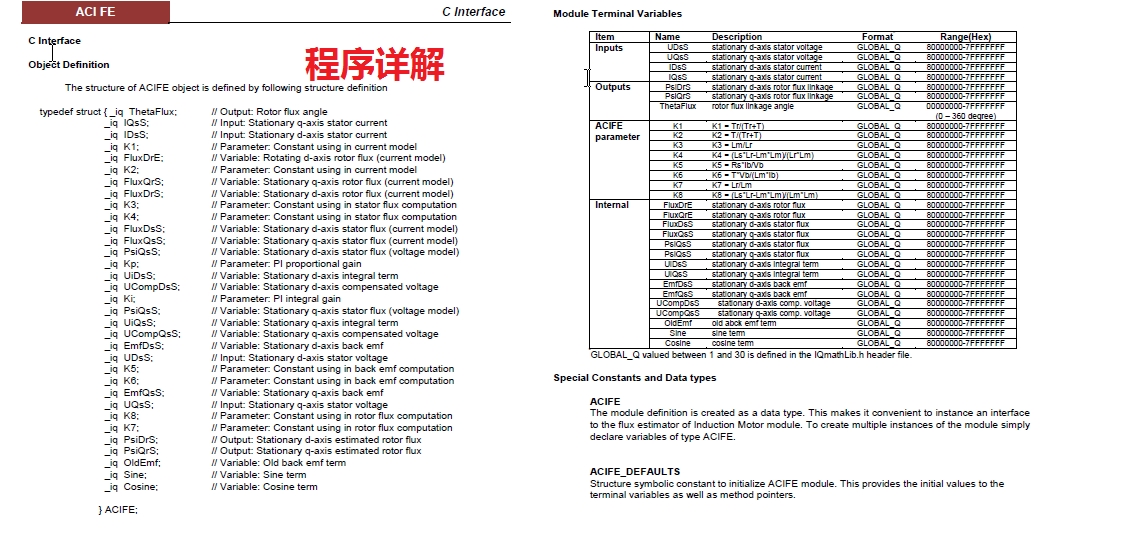
5.详细的算法原理推导,跟程序代码是完全对应的。
ID:28300677457556899
专业算法工程师
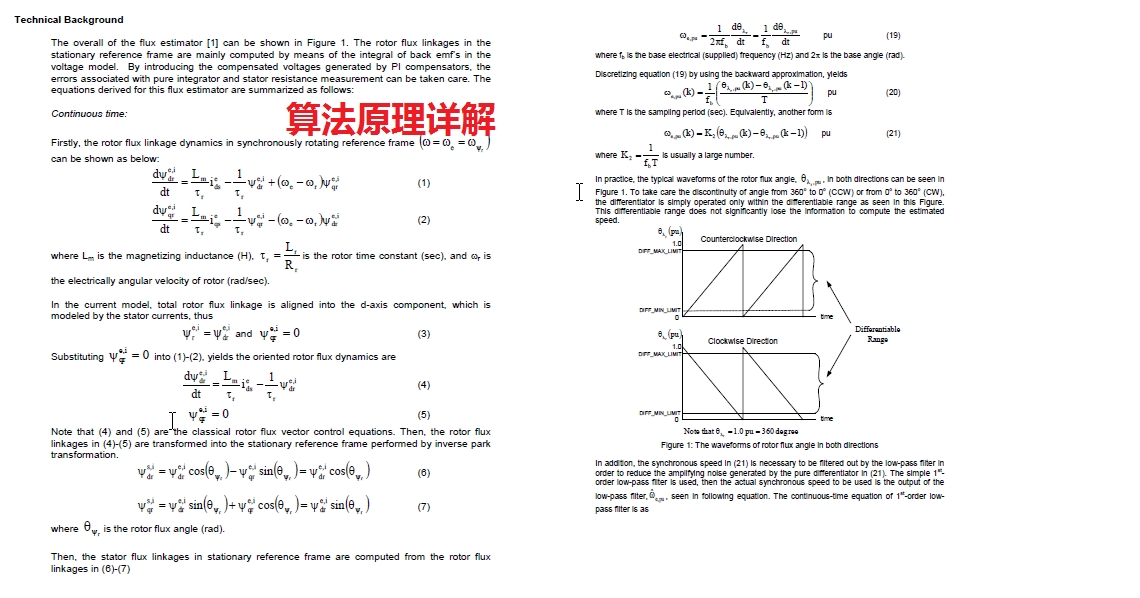




感应异步电机的无传感器矢量控制,是一种高精度的控制技术,可以在低速和中高速段实现电机的高精度转速估算。该控制技术基于"电压模型+电流模型"的磁链观测器,通过实时观测转子磁场的磁链变化,实现对电机转矩的精确控制。
这种控制方法已经成功地移植到了DSP芯片(TMS320F28335)和STM32等平台上,并在一台额定功率为33kW的异步电机上进行了实验。通过无传感器矢量控制,实现了电机的高精度转速估算,并且在转速估算的波形和试验台架数据中得到了验证。
其中,该控制方法具有以下特点:
-
高精度的转速估算
该控制方法基于磁链观测器,可以实时观测转子磁场的变化,从而精确估算电机的转速。通过使用"电压模型+电流模型",可以实现对电机在低速和中高速段的高精度转速估算。这对于需要精确控制电机转速的应用场景非常重要。 -
可实现带满载零速启动
传统的电机控制方法在电机零速启动时需要传感器进行反馈,而无传感器矢量控制方法可以实现电机在满载状态下的零速启动。这意味着在启动过程中,电机可以承受大负载的情况下保持稳定,并且抵抗负载扰动性强。 -
响应速度快,控制精度高
无传感器矢量控制方法可以实现电机的快速响应,响应速度快。通过精确估算电机的转速,并采用磁链观测器进行转子磁场定向控制,可以实现电机的高控制精度,满足对电机控制精度要求高的应用场景。 -
低畸变率的定子电流波形
该控制方法采用了SVPWM空间电压矢量调制,并通过磁链观测器对定子电流进行控制。这种控制方法可以降低定子电流波形的畸变率,从而减小了电机的功率损耗,并提高了电机的效率和稳定性。 -
算法原理推导与代码对应
该文中详细说明了无传感器矢量控制方法的算法原理,通过推导和分析,将算法原理与代码完全对应。这使得读者可以更好地理解控制方法的工作原理,并且可以直接在Simulink下使用S-Function的方式进行仿真,实现所见即所得。
综上所述,基于"电压模型+电流模型"的磁链观测器的感应异步电机无传感器矢量控制是一种高精度的控制技术。通过实时观测转子磁场的变化,实现了对电机转矩的精确控制。该控制方法具有高精度的转速估算、满载零速启动、抗负载扰动性强、响应速度快、控制精度高等特点,并且通过SVPWM空间电压矢量调制和磁链观测器的应用,可以实现低畸变率的定子电流波形。算法原理推导和代码对应的方式,使得读者可以更好地理解控制方法的工作原理,并且可以直接在Simulink下进行仿真。
相关的代码,程序地址如下:http://matup.cn/677457556899.html
















 661
661











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









