






基于SMO滑模观测器算法的永磁同步电机无传感器矢量控制的仿真模型+C代码:
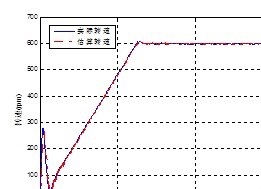
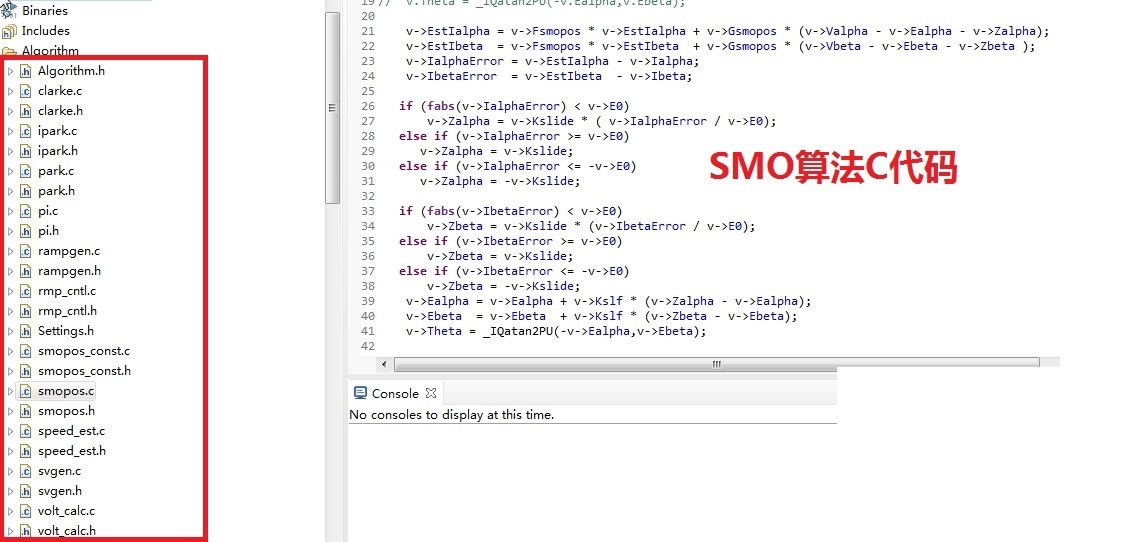
1. 完整的SMO滑模观测器算法的C代码,本人已经成功移植到DSP(TMS320F28335)芯片中,在一台额定功率为45kW的永磁同步电机的变频器中加以应用,响应速度快,转速估算精度高,抗负载扰动性能强,波形见下图;
2. SVPWM空间电压矢量调制,提高了直流母线电压的利用率,定子电流THD小;
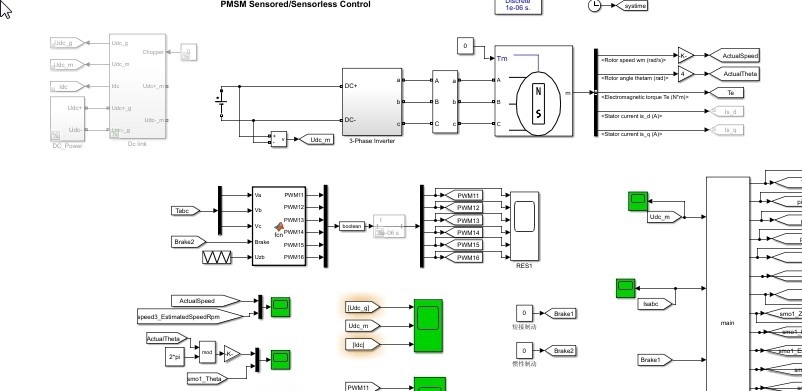
3. 仿真模型采用S-Function调用的方式,把算法C代码直接在Simulink下进行仿真,所见即所得!这不同于直接拖拽模块那种仿真方法!
4. 有详细的算法原理讲解。
大厂成熟的无感FOC代码。
ID:91500677457780522
专业算法工程师


基于SMO滑模观测器算法的永磁同步电机无传感器矢量控制的仿真模型+C代码
在永磁同步电机控制领域,传感器矢量控制是一种常用的方法。然而,传感器的使用会增加系统成本和复杂度,并且容易受到环境影响。为了解决这个问题,基于SMO滑模观测器算法的无传感器矢量控制成为了一种新的解决方案。
本文介绍了一种基于SMO滑模观测器算法的永磁同步电机无传感器矢量控制的仿真模型和C代码。该算法通过实时观测电机状态,并根据观测到的状态信息进行控制,从而实现了无需传感器的电机控制。
首先,本文给出了完整的SMO滑模观测器算法的C代码,并将其成功移植到DSP(TMS320F28335)芯片中。通过在一台额定功率为45kW的永磁同步电机的变频器中应用该算法,我们发现它具有响应速度快、转速估算精度高、抗负载扰动性能强的特点。同时,下图展示了该算法的波形。
接下来,本文介绍了SVPWM空间电压矢量调制的使用。通过该方法,我们可以提高直流母线电压的利用率,并减小定子电流的谐波失真(Total Harmonic Distortion,THD)。这样,我们能够更好地控制电机的运行状态,提高系统的效率。
为了验证无传感器矢量控制的效果,本文使用了基于S-Function的仿真模型。通过直接调用C代码并在Simulink下进行仿真,我们可以直观地观察到仿真结果,这与直接拖拽模块进行仿真的方法不同。这种基于C代码的仿真模型具备高度的灵活性和准确性,可以更好地模拟电机在实际运行中的行为。
最后,本文详细讲解了算法的原理。通过对SMO滑模观测器算法的分析,我们可以理解其实时观测状态的机制,并明确无传感器矢量控制的基本原理。这将为读者进一步的研究和应用提供了指导。
综上所述,本文基于SMO滑模观测器算法提出了一种无传感器矢量控制的永磁同步电机仿真模型和C代码。通过实验和仿真,我们证明了该算法具有良好的控制效果和性能,并且能够满足实际应用的需求。希望本文能够为相关领域的研究者和工程师提供参考和借鉴,促进无传感器矢量控制技术的发展和应用。
相关的代码,程序地址如下:http://matup.cn/677457780522.html
















 391
391











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









