







最小 SNAP 轨迹产生
1. Introduction
- 根据全局规划的路径点,产生满足运动学约束(安全可行)、光滑的轨迹
- 起点、中间点、终点的要求
- 安全优先
2. Minimum Snap Optimization
2.1 微分平坦
- 微分平坦:机器人的全维空间转换到低维空间,如UAV 的12个维度可以被微分平坦的输出和他们的导数进行代数组合得到。
- 比如无人机的位置,速度和姿态都可以由XYZ和偏航角以及其导数得到,集体推导参看课程和论文,参考2。
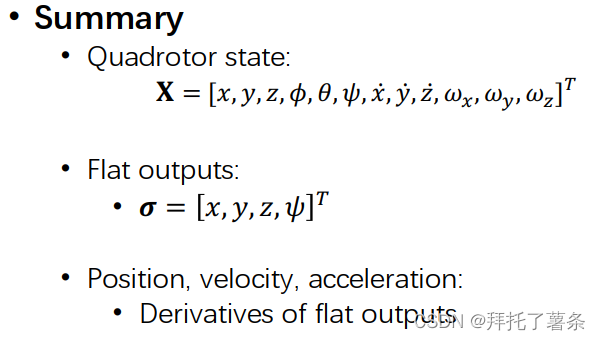
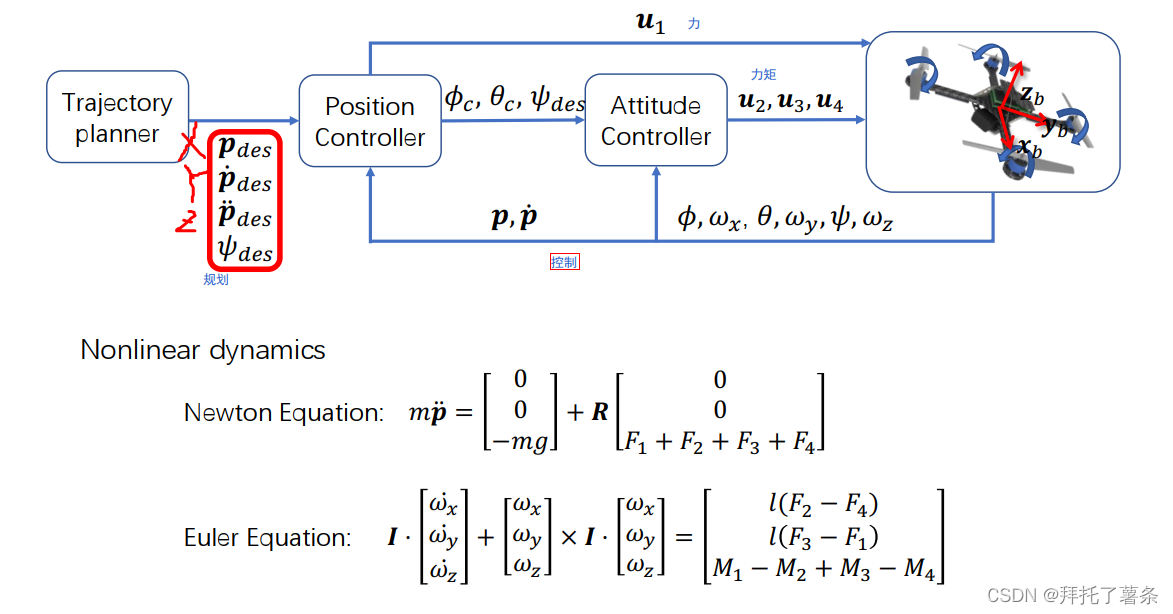
- 对无人机的控制,只是规划位置、速度,加速度和偏航角即可
2.2 Minimum-snap
这里依旧是解决 BVP 问题,但是涉及到多个线段,如何光滑连接。
- 基础的 BVP 问题研究,限制位置和速度
- 同时考虑起点,终点和中间点的一些限制,同时光滑优先,input是以最小的比率变化的。
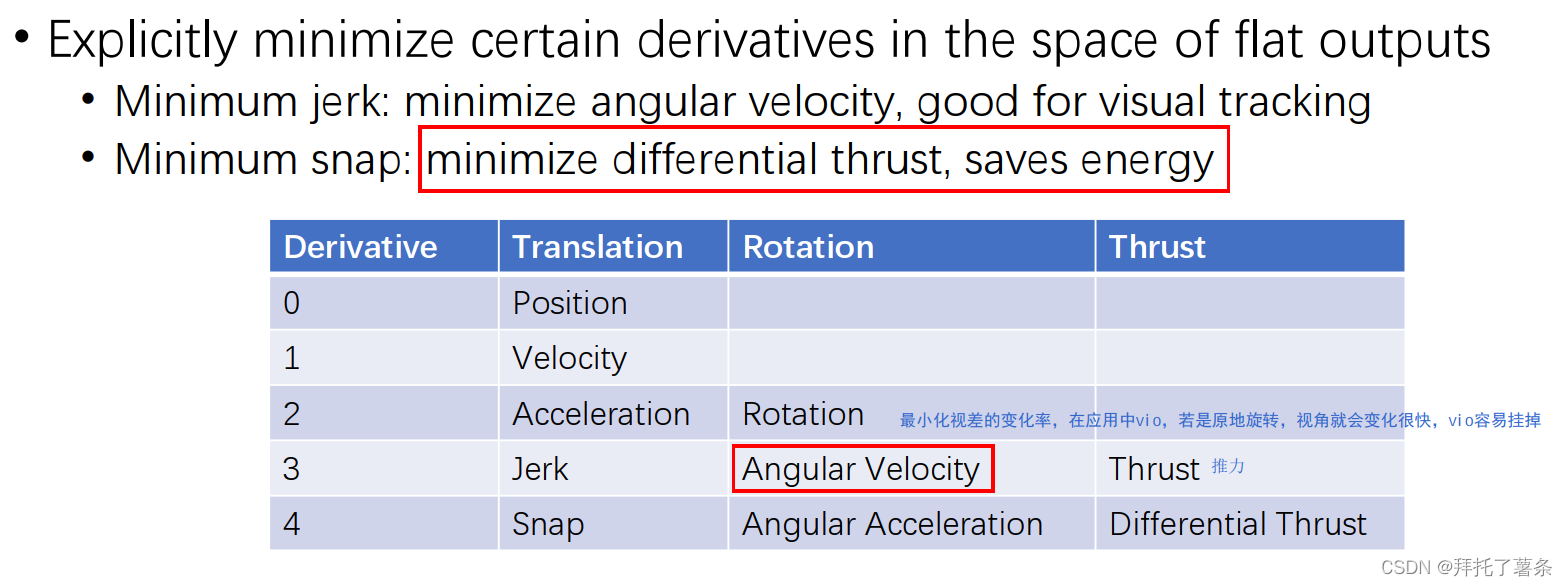
- minimum jerk :最小化角加速度变化,利于视觉追踪
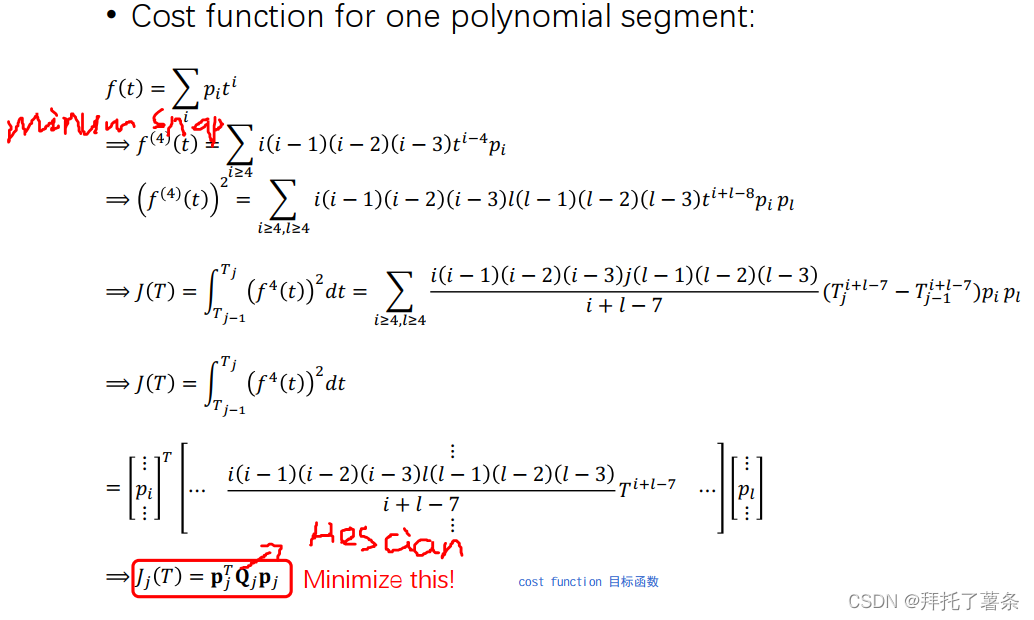
- minimum snap:推力的微分最小化,节省能量
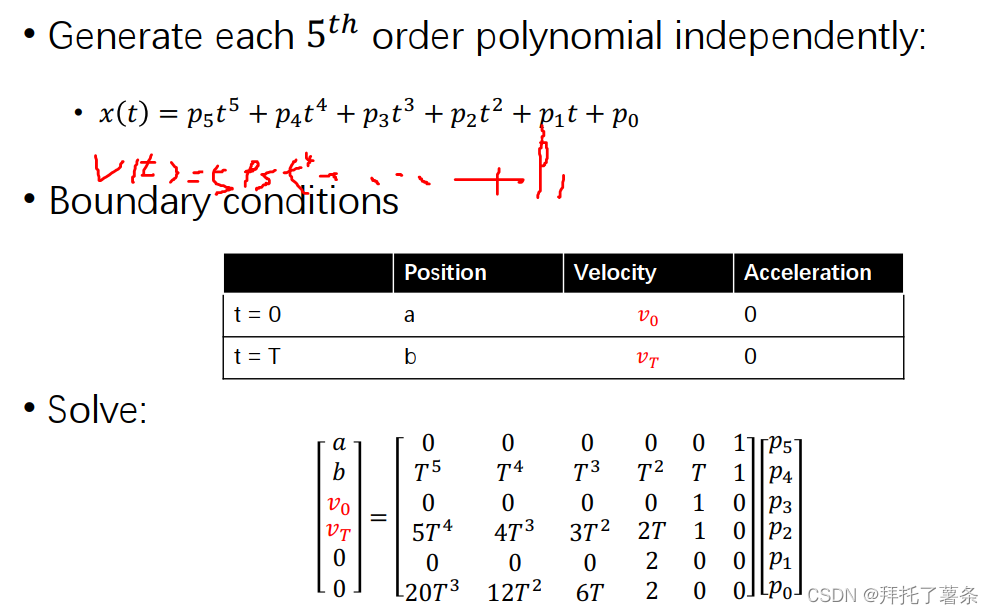
2.1 问题描述
- 各段表达式,这里每段时间都是已知的
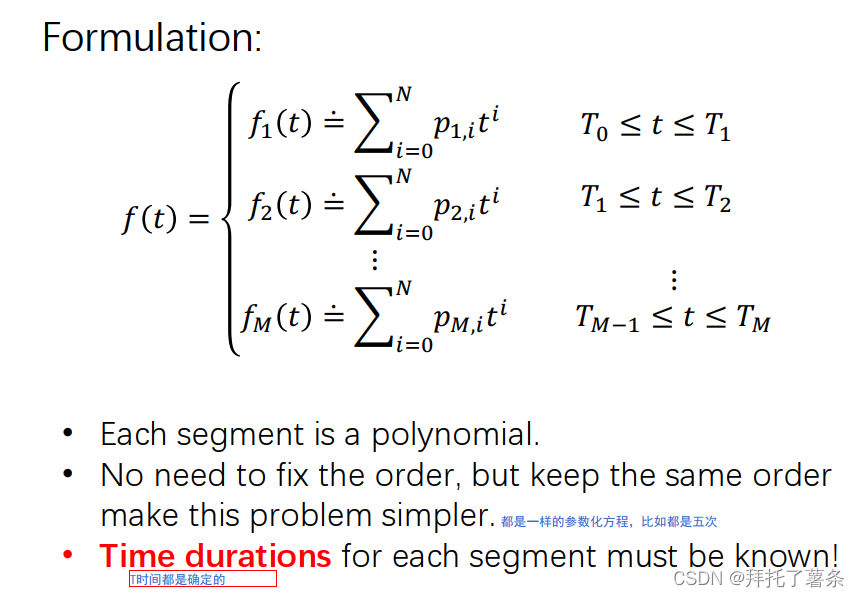
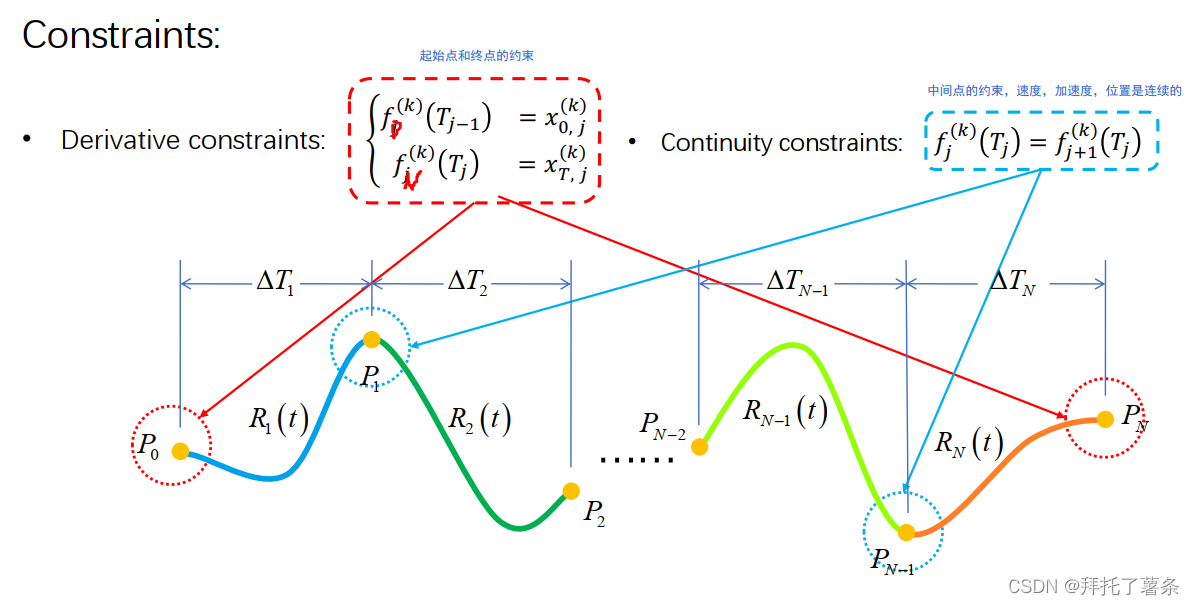
- 起点和终点,中间点约束
- 如何确定表达式的轨迹路径阶数(独立的三个条件)
-
确定阶数:一般最小jerk 是 5 阶 , 最小 snap 是 7 阶;
-
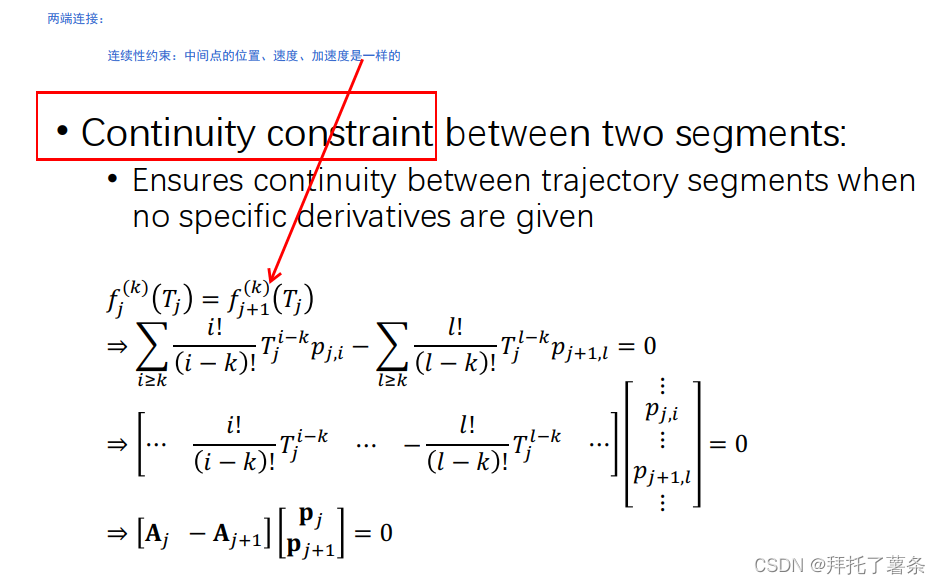
确定连续性:中间点是位置和速度,加速度连续的
-
-
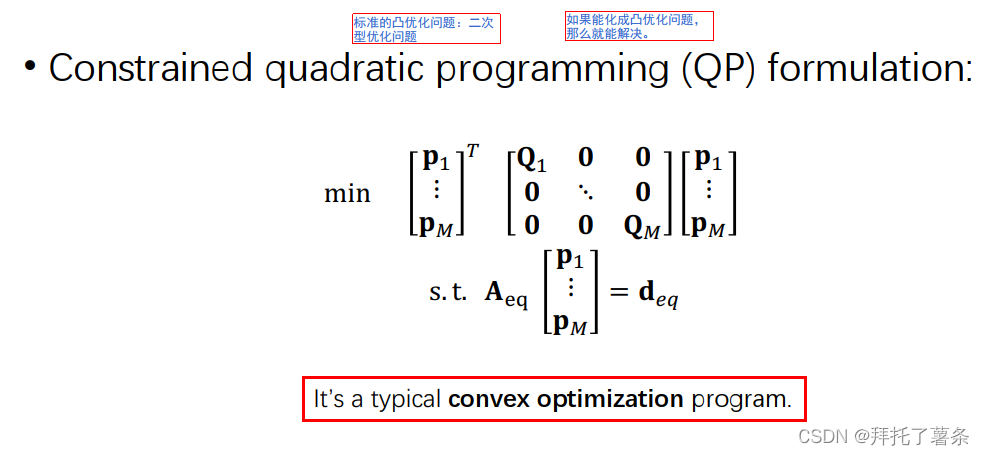
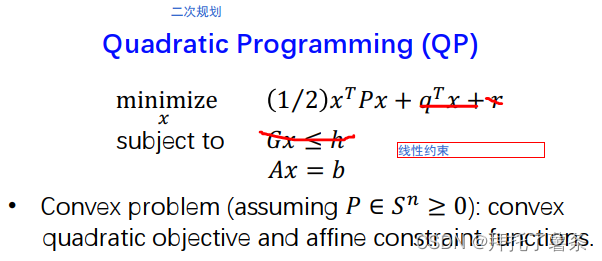
Minimum control input
-
典型的 QP 问题,可以用工具求解
-
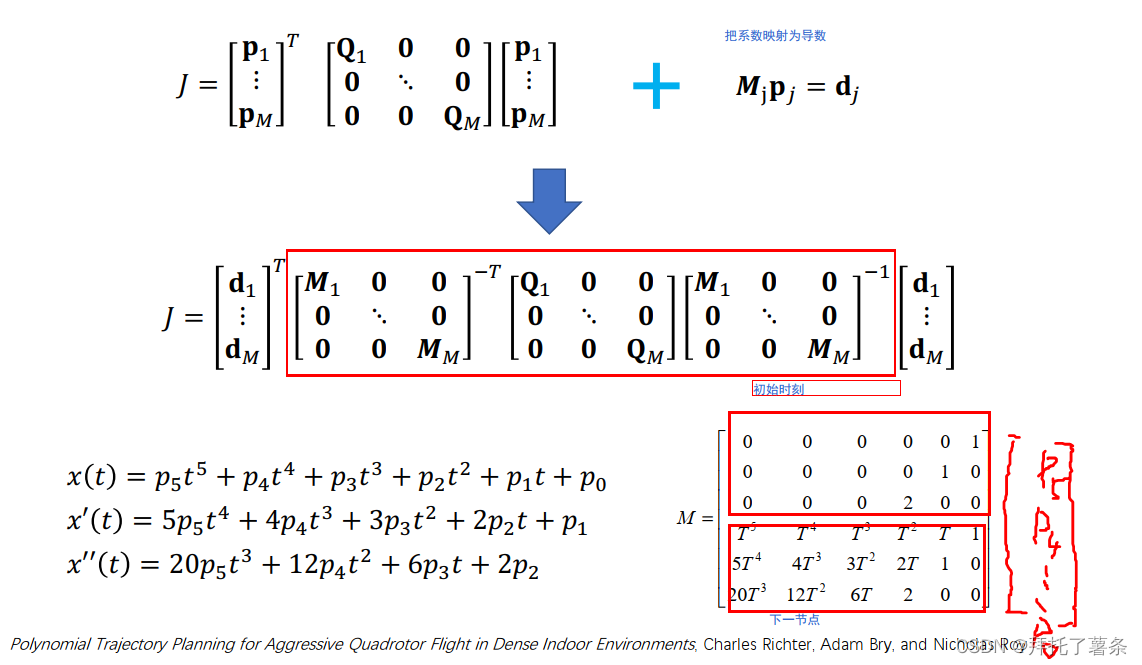
3. Closed-form Solution to Minimum Snap
将表达式的系数(无实际意义)映射成导数(位置,速度,加速度。。。),再进行闭式求解。具体过程建课程和论文[3],这里只是整理思路。
- 优缺点:
- 优点:通过路径搜索和轨迹优化的方式,算法高效,因为始终是在一个低维度的状态空间去考虑
- 缺点 :不能保证擦还是产生路径是安全的。解决,中间插点。后面考虑安全走廊的问题。
4. Implementation
工程问题参考课程和ppt,这里不详细说明。
参考
- 1.深蓝学院:移动机器人运动规划课程,具体内容请看课程,若内容侵权联系删除。
- 2.Minimum Snap Trajectory Generation and Control for Quadrotors, Daniel Mellinger and Vijay Kumar
- 3.Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments, Charles Richter, Adam Bry, and Nicholas Roy














 2162
2162











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









