






Multi-Resident Non-Contact Vital Sign Monitoring Using Radar: A Review
多用户非接触式生命体征雷达监测研究进展
生命体征被公认为改善健康状况的重要关键部分,世界各地医疗机构和临床观察都强调,需要持续检测心率和呼吸等生命体征,以进行更好的健康管理。雷达作为一种潜在的非接触式生命体征连续检测技术被广泛研究。本文对目前利用雷达进行非接触式生命体征(NCVS)测量的技术进行了综述。我们强调了在多用户环境中,需要往更高的频率发展以获得更高的精度,并分析了毫米波暴露对人类健康的影响和环境衰减的影响。并且详细讨论了与硬件和信号处理算法相关的重大挑战。最后,我们总结了多用户室内环境中生命体征检测相关的未来方向和挑战。
一、雷达系统拓扑和架构
1975年,Lin[26]通过测量幼年兔和人类的呼吸运动,首次成功实验并验证了微波传感的概念。
NCVS雷达拓扑结构
(1) 连续波雷达—CW雷达:CW雷达连续发射窄带信号,单源连续波雷达可用于发射和接收,具有简单、传输频谱扩展绩效、接收机各阶段滤波器简化、信号处理简单等优点。但是无法再时间上分离反射,导致接收信号中引入直流DC偏移和低频噪声,另外由于缺乏调制而丢失了时间信息,因此无法提取目标距离信息。此外,CW雷达系统的主要限制是发射机和接收机之间需要给隔离。
(2)调频连续波雷达—FMCW雷达:FMCW是频域雷达传感器,是CW雷达的延伸,克服了时间信息缺失而无法测量距离的问题。发射信号经过频率调制被发射出来,时间信息是通过接收到的信号与发射信号的频率差引入的,发射信号与接收信号经过混频得到中频信号,也被称为频扫或啁啾chirp。FMCW需要解决TX-RX泄露、交流-直流耦合效应、RF非线性和高采样率等要求。
(3)脉冲雷达/超宽带UWB雷达:脉冲雷达通过观察脉冲频谱上的多普勒频移,时域上测量发射脉冲和回拨之间的延迟来确定距离。脉冲雷达是典型的时域雷达,发射脉冲序列、单脉冲或者具有一定脉冲重复间隔的调制脉冲。发射和接收脉冲之间的双向传播时间决定了目标的距离,脉冲雷达提供了更宽的带宽。在非接触式生命体征监测中,目标通常与最近的杂波处于相同距离,UWB雷达提供了消除泄露的优势,然而,距离测量并不会有助于单个目标的生理运动监测,相比CW结构的复杂性增加并不会导致相应的效益增加。此外,超宽带雷达传感器不适合高分辨率应用,增加脉冲宽带可以解决这个问题,但是这会缩短脉冲宽度,减小脉冲宽带收到技术限制。
雷达射频前端接收机体系结构
接收的信号与发射信号混频并通过滤波以恢复基带信号进行进一步处理,根据转换原理,雷达RF前端可分为外差和零差。基于解调方案,RF接收机可以是单信道也可以是正交信道。
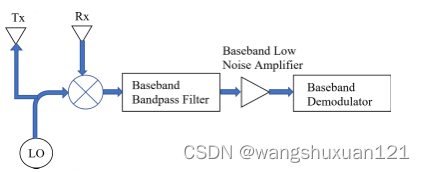
(1)外差接收机:在发射和接收链路中包含一个单独的本振LO,接收的信号在通过带通滤波器之后与LO产生的不同于发射频率的信号混频,因此,混频信号在非零中频上调制,而不直接转换到基带。中频信号在通过另一个带通滤波器,通过低噪声放大器LNA放大,然后直接解调。与零差结构相比,外差接收机对直流偏移具有鲁棒性,一个主要的缺点是需要与非线性相关的大型电路元件。
(2)零差接收机,零差结构直接将接收的信号转换为基带。接收信号与发射信号相同的本振频率混频,并使用带通滤波器转换到基带。引入了直流偏移。
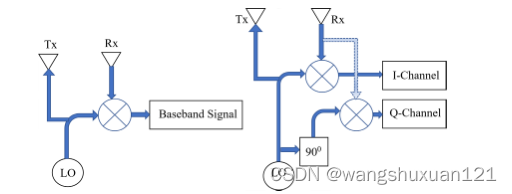
单通道和正交通道结构
多普勒雷达收发器可设计为单通道或同相(I)和正交(Q)通道,如上图所示。目标位置和工作频率导致了一个零点问题。单通道外差/零差接收机对零点问题高度敏感。在最坏的情况下,接收器几乎没有观察到用于估计生理运动的相位调制信号。因此,正交收发器或单通道频率调谐已被用于最佳信号解调。通过正交收发器的同相(I)和正交(Q)输出,总有一个通道不在零点检测[28]处。具体来说,FMCW信号具有接收信号的复杂性质,单通道就足以解决零点问题。使用复杂信号和FMCW斜坡压缩可以提高信噪比。
NCVS雷达基础
多普勒雷达发射一个频率为
f
f
f的信号
T
x
(
t
)
T_x(t)
Tx(t),公式如下
T
x
(
t
)
=
A
1
c
o
s
[
2
π
f
t
+
ϕ
(
t
)
]
T_x(t)=A_1cos[2\pi ft + \phi(t)]
Tx(t)=A1cos[2πft+ϕ(t)]
其中
ϕ
(
t
)
\phi(t)
ϕ(t)是本振的相位噪声。如果目标在距离
d
i
n
i
d_{ini}
dini处,
x
(
t
)
x(t)
x(t)是胸腔随时间的位移,那么发射天线与胸腔在时间
t
t
t的距离
d
(
t
)
d(t)
d(t)可以写成:
d
(
t
)
=
d
i
n
i
+
x
(
t
)
d(t)=d_{ini}+x(t)
d(t)=dini+x(t)
接收信号
R
x
(
t
)
R_x(t)
Rx(t)可以描述为:
R
x
(
t
)
=
A
2
cos
[
2
π
f
(
t
−
t
d
)
+
ϕ
(
t
−
t
d
)
+
θ
c
]
R_x(t)=A_2\cos[2\pi f(t-t_d)+\phi(t-t_d)+\theta_c]
Rx(t)=A2cos[2πf(t−td)+ϕ(t−td)+θc]
其中
A
2
A_2
A2是接收信号振幅,
t
d
t_d
td是双向时延,
θ
c
\theta_c
θc是恒定相移。
t
d
=
2
d
(
t
)
/
c
t_d=2d(t)/c
td=2d(t)/c,由于
d
i
n
i
>
>
x
(
t
)
d_{ini} >>x(t)
dini>>x(t),因此
x
(
t
)
/
c
x(t)/c
x(t)/c可以忽略。因此接收信号可以重写为:
R
x
(
t
)
=
A
2
cos
[
2
π
f
t
−
4
π
d
i
n
i
λ
+
ϕ
(
t
−
2
d
i
n
i
c
)
+
θ
c
]
R_x(t)=A_2\cos[2\pi ft-\frac{4\pi d_{ini}}{\lambda}+\phi(t-\frac{2d_{ini}}{c})+\theta_c]
Rx(t)=A2cos[2πft−λ4πdini+ϕ(t−c2dini)+θc]
对于正交接收机结构,接收信号乘以两个独立通道
9
0
∘
90^\circ
90∘相移的本振信号,分别对两个混频信号进行低通滤波,分别获得同向和正交两个基带信号
B
I
B_I
BI和
B
Q
B_Q
BQ,公式如下,这里没有将
x
(
t
)
/
c
x(t)/c
x(t)/c忽略。
B
I
(
t
)
=
A
2
A
1
2
cos
[
4
π
d
i
n
i
λ
−
θ
c
+
4
π
x
(
t
)
λ
+
ϕ
R
(
t
)
]
B_I(t)=\frac{A_2A_1}{2}\cos[\frac{4\pi d_{ini}}{\lambda}-\theta_c+\frac{4\pi x(t)}{\lambda}+\phi_R(t)]
BI(t)=2A2A1cos[λ4πdini−θc+λ4πx(t)+ϕR(t)]
B
Q
(
t
)
=
A
2
A
1
2
sin
[
4
π
d
i
n
i
λ
−
θ
c
+
4
π
x
(
t
)
λ
+
ϕ
R
(
t
)
]
B_Q(t)=\frac{A_2A_1}{2}\sin[\frac{4\pi d_{ini}}{\lambda}-\theta_c+\frac{4\pi x(t)}{\lambda}+\phi_R(t)]
BQ(t)=2A2A1sin[λ4πdini−θc+λ4πx(t)+ϕR(t)]
tan
[
4
π
d
i
n
i
λ
−
θ
c
+
4
π
x
(
t
)
λ
+
ϕ
R
(
t
)
]
=
tan
θ
R
\tan[\frac{4\pi d_{ini}}{\lambda}-\theta_c+\frac{4\pi x(t)}{\lambda}+\phi_R(t)]=\tan\theta_R
tan[λ4πdini−θc+λ4πx(t)+ϕR(t)]=tanθR
θ
R
=
tan
−
1
[
B
Q
(
t
)
B
I
(
t
)
]
\theta_R=\tan^{-1}[\frac{B_Q(t)}{B_I(t)}]
θR=tan−1[BI(t)BQ(t)]
可以看出相位变化
θ
R
\theta_R
θR与胸壁位移
x
(
t
)
x(t)
x(t)成线性正比关系。
二、发射功率和工作频率对基本雷达设计的影响
雷达系统的接收信号强度公式:
S
=
P
t
G
t
4
π
R
2
⋅
σ
c
4
π
R
2
⋅
A
e
S=\frac{P_tG_t}{4\pi R^2}\cdot\frac{\sigma_c}{4\pi R^2}\cdot A_e
S=4πR2PtGt⋅4πR2σc⋅Ae
其中
S
S
S是返回信号强度,
P
t
P_t
Pt是雷达发射功率,
R
R
R为目标距离,
G
t
G_t
Gt和
A
e
A_e
Ae分别表示天线增益和有效面积,
σ
c
\sigma_c
σc是目标截面积。
为了获得更好的接收信号强度,必须通过提高发射功率Pt来最大化信噪比。然而,电磁场的发射功率受到不利的健康影响和生物参数退化的限制。另外,目标距离、雷达的范围取决于
P
t
P_t
Pt和
A
e
A_e
Ae,可以通过增加功率或者光圈面积或者天线增益或者孔径米面积,但是在家庭环境中,天线的尺寸不能增加。因此人们开始研究适合生命体征检测的频率范围。
大部分研究主要集中在4个波段,即L波段(1-2 GHz)、X波段(8-12 GHz)、ka波段(26。GHz)和W (75-110 GHz)频段。目前大多数的研究都是使用24 GHz频段作为雷达传感器。24 GHz系统由两个波段[32]组成,一个是窄带宽,24GHz到24.5GHz。一个是超快带,带宽5GHz,提供了高距离分辨率。
毫米波雷达
毫米波雷达系统的另一个设计方面是波束宽度。对于等效天线尺寸,毫米波频率提供了一个小的波束角度。窄的光束宽度增加了方向性和方向性。
非接触生命体征监测的挑战
心脏信号的量级小,对杂波、运动伪影、呼吸谐波引起的干扰等噪声高度敏感。此外,硬件的非理想性、直流偏移、噪声、相位偏移都对NCVS构成挑战。
这部分都是关于硬件的介绍,暂时不写了。
信号处理、检测算法和相关挑战
与呼吸相比,由于心跳,反射信号的位移最小。RR信号的二阶和三阶谐波在量级上与HR基频相当。心率和呼吸信号之间的互调以及RR谐波使心率的提取变得困难,增加了信号处理和检测算法的复杂性。随机体运动和杂波在信号中引入了噪声,这是设计有效的低信噪比信号检测算法的障碍。这个问题如图9所示,红色虚线构成了杂波。各种方法已经在文献中研究,以解决这些挑战,并设计一个高效和简单的检测算法,以准确提取RR和HR。
(1)身体的随机运动引起的运动伪影。文献[62,78,79, 81-85]
62:利用基于复信号调制和双收发机的arctan调制技术可以消除随机体运动产生的噪声
78:多雷达
80:谐波雷达
81:分析身体运动作为接收信号中的点目标的影响
(2)杂波:多径衰落、其他物体反射。文献[84,86,87]
84:背景减法技术如奇异值分解、主成分分析(PCA)和帧差分
86:测量从人的头部进行,以减少来自人体躯干和其他身体部位的多重反射信号
83-85:自适应确定调节参数(REP A),以减少小运动伪影的影响。引入移动平均滤波和背景提取技术
87:利用超宽带雷达阵列的多输入多输出(MIMO)配置的时间门控特性,也消除了不需要的回波
(3)呼吸谐波和互调产物引起的干扰。心跳信号振幅和频率分别用位移和胸部运动速度来表征。呼吸和心跳的胸部位移分别在4 - 12毫米和0.2 - 0.5毫米之间。HR信号比RR信号振幅小,频率略高。此外,RR信号的二阶和三阶谐波在幅度上与HR基频相当,并引起无法滤波的干扰。同时,互调产物也会影响HR的估计。当两个不同的频率通过一个非线性装置时,额外的频率信号将由这两个频率的线性组合产生。文献[89,90,91,92,94,95,96,97,98,99]
89:谐波抵消器或移动目标指示器(MTI)
90:利用可穿戴标签产生的互调频率设计了非线性智能传感器
91:连续小波变换进行多分辨率分析
92:利用复信号解调技术对接收信号进行频谱分析,重构呼吸信号
93:考虑了信号的二阶导数来代替直接位移值的处理
94:采用峰值检测算法从RR主导的微弱心率信号中提取心率变异性(HRV)
95:高采样率降低了模拟滤波器的陡峭截止要求,并提供了大分辨率来解决谐波问题
96\97:设计了谐波路径算法(HAP A)来寻找等距的三个节点并估计HR频率。
98:设计了一种呼吸运动检测算法,该算法同时利用了时变延迟和相位调制。
(4)直流偏移和噪声影响:低信噪比信号由于在接收机的直流电偏置和放大器的其他非线性而观察到性能下降。
101:利用FIR滤波来解决低信噪比信号的挑战
102:将STFT应用于与HR相关的频段,对所选频段内的每个频谱进行集成,以去除噪声的影响
103:通过矢量减法处理信号以去除背景噪声
104:平均减法
107:阐述了Tx-Rx泄漏是由于FMCW雷达天线耦合引起的直流偏移造成的频谱泄漏造成的。
108:采用高效梯度下降算法实现动态直流偏置跟踪并进行直流偏置校正
51:指出在arctan解调之前,这个直流偏移必须精确校准,这依赖于通过检测到的运动跟踪的圆弧中心的精确估计。
109-112:针对直流偏移提出了各种中心估计算法
113:表明即使胸壁运动的幅度很小,但由于波长较小,弧长与高频的弧长相当
114:如果由相位变化引起的弧长相对较短,则线性解调方法可能是更准确的选择
115:采用高RF-LO隔离混合器
116:设计了一种具有直流耦合自适应调谐架构的雷达传感器,该结构允许基带放大器以足够高的增益工作
数字滤波器和采样率的影响
117:强调在第一阶段必须考虑提高信噪比。
118:指出使用高频将是有益的,因为增加相位调制;然而,正如文中所提到的模拟和测量,当增加频率时,一些失真效应也会被放大
119:为了去除不必要杂波造成的信号部分,采用了基于环回滤波器的技术
120:利用缺口滤波器来消除呼吸的谐波
121-123:描述了快速信号处理是基于FMCW雷达的NCVS系统的关键问题。由于胸壁运动的振幅很小,为了获得较高的信噪比,在模拟到数字的转换过程中需要高速采样。但是,高采样率会产生大量的数据需要处理,降低了实时性。为了解决这个问题,已经实现了采样率转换(SRC)和不同的数字下变频(DDC)结构
124:6端口雷达
信号处理算法
HR和RR都需要从接收到的数据中提取。各种信号处理算法被采用,每一种都有自己的优点和局限性。提取HR和RR最直接的方法是在相位信号的长度上使用FFT并找到频谱中的峰值。然而,由于傅立叶变换的数据长度有限,存在泄露问题,导致检测性能下降。傅里叶变换要求重要信号在短时间内的不变性。如果生命体征随时间变化,FFT算法是无效的,提取性能大幅下降。
125:提出了一种基于参数和循环优化的方法RELAX算法
126:过使用多种信号分类(MUSIC)算法解决了FFT涂抹和泄漏问题
129:使用两级模拟带通滤波器(BPF)进行时域峰值检测,提取HR和RR。
三、多人生命体征检测的挑战
大多数研究都是在实验室环境中进行的,在雷达传感器附近有一个静态目标,如图10(a)所示。这些系统在受控环境中提供了良好的结果,但真实的场景意味着新的挑战。在现实情况下,患者很有可能由另一个人陪同,如护士或陪护人员、有看护人的老年人和有父母的婴儿,如图10(b)所示。在这种情况下,本文提出的生命体征监测系统将停止工作。为了在所有实际场景中扩展生命体征监测系统的适应性,设计需要在多用户环境中概念化和验证。
134:通过稳健的信号处理和特征提取算法(多人跟踪算法)来分离不同距离范围内的目标
135:相位信息是通过FFT获得的,并且对距离应用参数谱估计,从而获得高精度和
高分辨率。
另一个问题是运动伪影,因为身体运动产生的信号比使检测困难的生命体征强[25],频谱中会存在鬼影,通过高增益的天线抑制旁瓣,功率集中在主瓣上解决。
87:利用MIMO技术实现了人体生命体征监测。
132:观察到运动目标会收到影响来自静止物体的发射和接收信号。它会与来自静止物体的反射信号中产生相位和振幅调制。这使得在室内环境中存在静止杂波时很难检测目标,即环境中存在静态杂波。利用连续小波变换定位伪影,然后使用移动平均滤波器抑制伪影,从而消除随机身体运动的影响。
131\136:利用FMCW特性将多目标隔离再不同的range bin中,并提取呼吸和心跳。
114:利用步进连续波雷达SFCW,提取人体呼吸心跳。
四、总结和展望
自20世纪70年代初至今,硬件技术的进步使得在单芯片上实现低功耗和低成本雷达成为可能。对于NCVS监测,雷达系统在2010年后获得了发展势头,近年来研究显示出增长趋势。目前的研究工作是生产一种NCVS设备,该设备与ECG准确度相当,同时节能、体积更小、坚固可靠,适合实际应用。
NCVS系统中使用了各种雷达拓扑。然而,FMCW具有固有的距离选通能力,可以在不同的频率段中分离多个目标。除了雷达类型外,天线设计也会影响系统性能。高增益天线提高了接收信号的信噪比,从而提高了接收机的灵敏度。另一方面,为了减少杂波的影响,需要高定向天线。
对系统性能有重大影响的其他方面包括相位噪声和偏移误差、多径衰落、增益、正交解调中的相位误差以及ADC动态范围拟合的非理想性。为了解决这些问题,研究了不同的技术和稳健的信号处理算法,表四总结了更准确提取HR参数的方法。每种技术和方法的局限性为改进性能开辟了进一步的研究途径。
频率越高,带宽越大,分辨率越高,检测越准确。因此,趋势是从较低的ISM频段向较高的频率发展,现在向mmWave发展。由于波长较小,毫米波雷达具有占地面积较小的优点。但是大部分文献都是在距离0.5m到2m,如何提升探测距离是关键。
几乎所有实验都是在受控的实验室环境进行的,有明确的路径或距离。















 2760
2760











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









