







 这篇博客介绍了点云处理的常用软件,包括开源的CloudCompare和Meshlab,以及商业软件如Microstation TerraSolid和LiDAR360。此外,还提到了点云处理的重要开源库PCL和Open3D,以及一些典型的数据集,如ETH和Semantic3D,用于点云注册和语义分割。这些工具和资源广泛应用于机器人、遥感、地形测绘等领域。
这篇博客介绍了点云处理的常用软件,包括开源的CloudCompare和Meshlab,以及商业软件如Microstation TerraSolid和LiDAR360。此外,还提到了点云处理的重要开源库PCL和Open3D,以及一些典型的数据集,如ETH和Semantic3D,用于点云注册和语义分割。这些工具和资源广泛应用于机器人、遥感、地形测绘等领域。
1、常用软件
(1)开源软件:
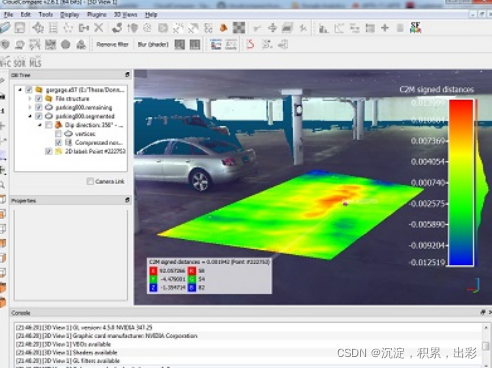
CloudCompare
特点:
开源,且支持多平台(Windows, Mac,Linux),支持常见的点云数据格式,简单的点云编辑,支持用户自己添加插件和增加新功能(如Ransac,Poisson MeshReconstruction, Classification withCANUPO),适合于点云可视化,简单编辑或者处理
Meshlab
特点:处理和编辑3D三角形网格的开源系统,主要是编辑,清理,修复,检查,渲染,纹理和转换网格的工具3D Acquisition: color mapping andtexturing Cleaning 3D models,支持多平台(Win,Linux, Mac)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









