







 超级会员免费看
超级会员免费看
参考
http://t.csdnimg.cn/hXJK2
串口、 UART、TTL、RS232、RS422、RS485关系
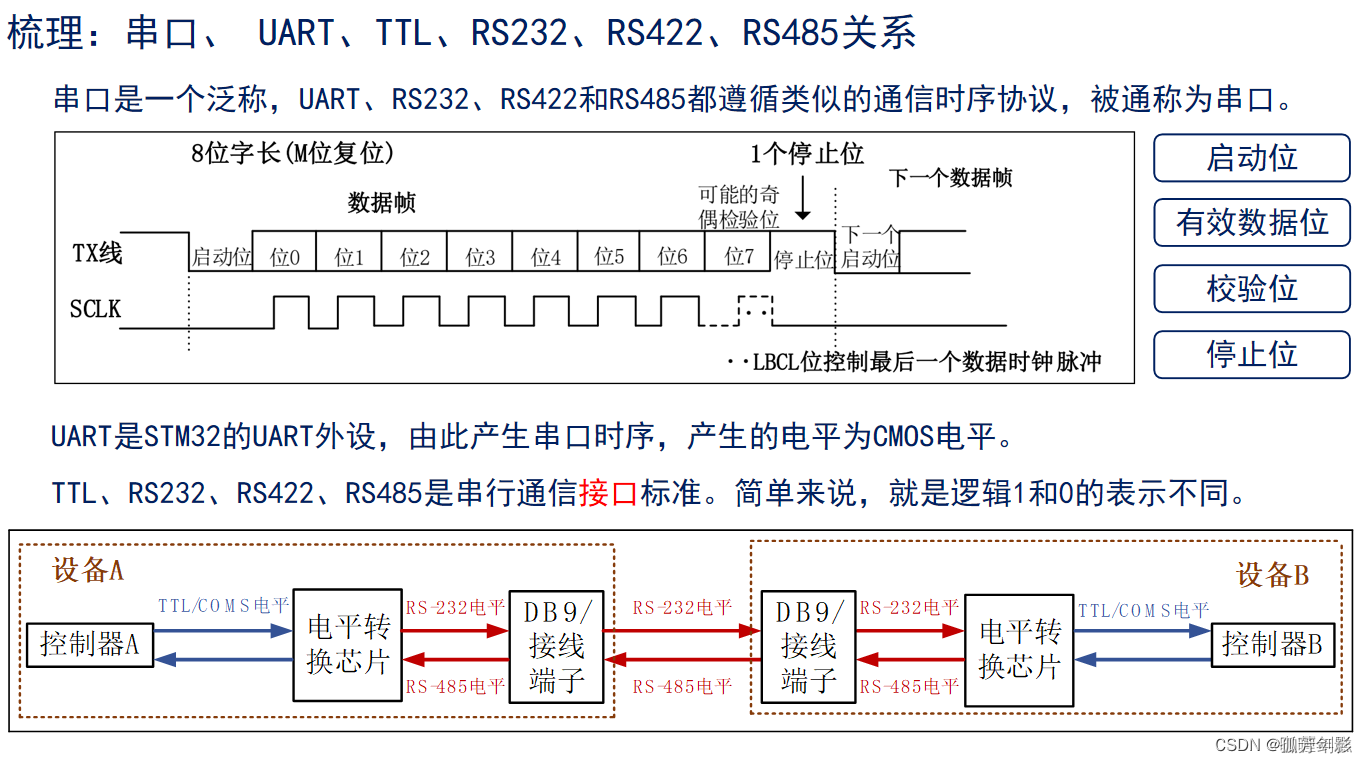
串口、UART、TTL、RS232、RS422和RS485之间的关系可以如此理解:
串口:是一个广义术语,通常指的是采用串行通信协议的接口,它可以包括多种具体的物理接口标准和逻辑电平标准。
UART(通用异步收发传输器):是一种集成电路,负责处理串行通信协议中的时序生成、数据编码解码等功能,是嵌入式系统中常见的用于实现串行通信的硬件模块。UART本身并不规定具体的电气特性,而是产生遵循串行通信时序的信号(如启动位、数据位、校验位和停止位)。
TTL(晶体管-晶体管逻辑)电平:是一种逻辑电平标准,通常在集成电路内部或者集成电路之间近距离通信时使用,它的高低电平相对较低,通常为3.3V或5V表示逻辑1,0V表示逻辑0。
RS232:是一种早期广泛应用于计算机和终端设备之间的串

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 8614
8614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









