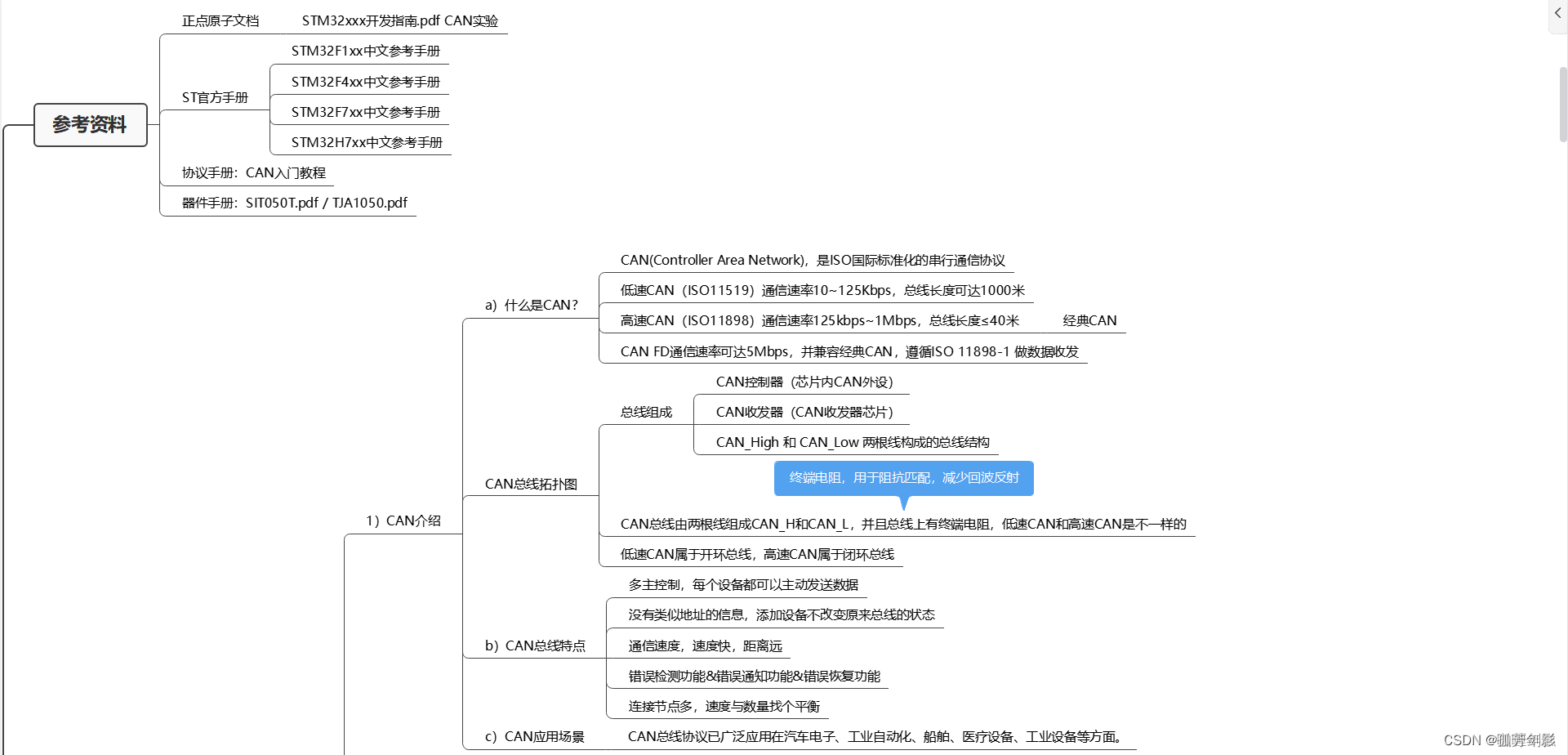
参考 http://t.csdnimg.cn/HSaU6 一、CAN基础知识介绍 1.1、CAN介绍 CAN(Controller Area Network)是一种串行通信总线协议,最初由德国博世公司在20世纪80年代中期研发,主要用于汽车内部电子控制单元(ECU)之间的通信。随着时间的发展,CAN协议因其高性能、可靠性和灵活性而逐渐被广泛应用于工业控制、航空航天、船舶、医疗设备、智能家居等领域。 <








 超级会员免费看
超级会员免费看

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






