







1 camera基本代码架构
高通平台对于camera的代码组织,大体上还是遵循Android的框架:即上层应用和HAL层交互,高通平台在HAL层里面实现自己的一套管理策略;在kernel中实现sensor的底层驱动。但是,对于最核心的sensor端的底层设置、ISP效果相关等代码则是单独进行了抽离,放在了一个daemon进程中进行管理:
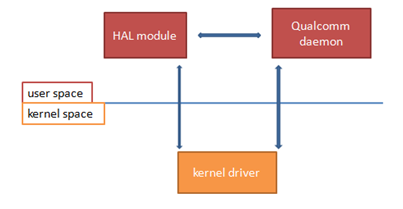
图1 Qualcomm平台camera代码架构简图
由于高通把大部分具体的设置及参数放到了daemon进程中,所以在kernel部分只是进行了V4L2的设备注册、IIC设备注册等简单的动作:
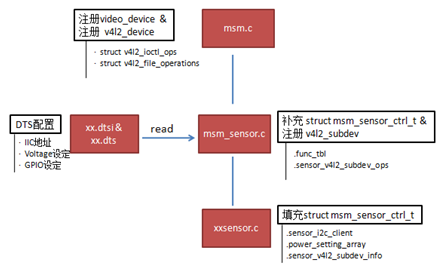
图2 kernel层camera主要代码简图
如上图,camera在kernel层的主文件为msm.c,负责设备的具体注册及相关方法的填充;在msm_sensor.c文件中,主要维护高通自己的一个sensor相关结构体—msm_sensor_ctrl_t,同时把dts文件中的配置信息读取出来;kernel层对于不同的sensor对应自己的一个驱动文件— xxsensor.c,主要是把power setting的设定填充到msm_sensor_ctrl_t中。
在vendor目录下,高通把各个sensor实质性的代码放置在此。一部分代码是高通自己实现的daemon进程和kernel层及HAL层进行通讯的框架代码;另一部分则是和sensor相关的chromatix效果代码和sensor lib部分代码(init setting、lens info、output info)。
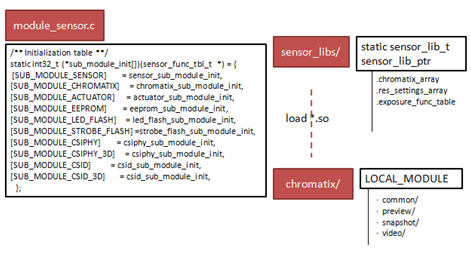
图3 vendor下主要camera代码简图
如上图,高通平台通过一个函数指针数组sub_module_init来管理sensor相关的组件;其中重要的是sensor_sub_module_init和chromatix_sub_module_init模块,对于sensor模块需要对应填充sensor_lib_t下的接口,对于chromatix模块则是通过高通的chromatix工具生成。
从更高的层次来看,sensor部分的代码只是camera子系统的一部分。打开高通vendor下面关于camera的源码也可以看到,/mm-camera2/media-controller/modules目录下面,sensors只是modules文件下面其中的一个子目录。
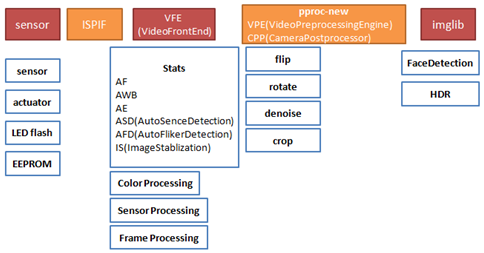
图4 高通camera子系统模块草图
2 主要移植步骤
2.1 kernel层代码移植
对于kernel层的代码移植,实际上对dts文件的移植。因为kernel层驱动代码基本已经被高通的框架以及vendor下代码架空,只剩下一个上电的列表。具体步骤为:
1. 在目录kernel/arch/arm/boot/dts/下的对应dtsi文件中新增camera节点,主要关注节点中的IIC地址、sensro的ID信息、电压设定信息:
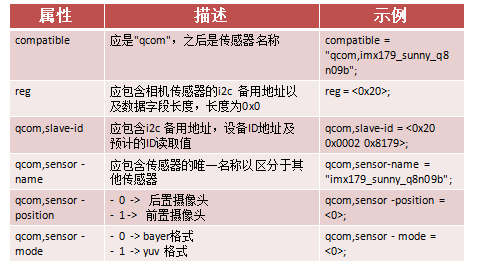
图5 dtsi中camera中的节点信息截选
2.在目录kernel/drivers/media/platform/msm/camera_v2/sensor/目录新增xxsensor.c文件,主要填充msm_sensor_power_setting结构体:sensor上电的包含的引脚设定和电压设定,具体格式可以参考同目录下的其他文件。
3. kernel下面的相关mk文件:
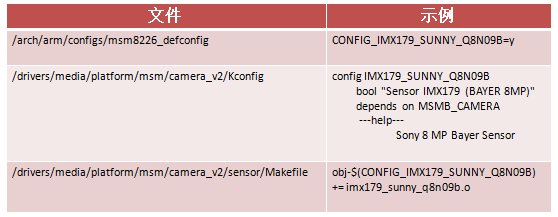
图6 kernel目录下camera相关配置文件
其他:如果sensor中带有eeprom,需要在dts文件中增加eeprom的节点信息;同样,sensor带有对焦功能,需要在dts文件中增加actuator节点信息;对于带eeprom的sensor,还需要配置eeprom的时钟控制代码(有待研究)。
2.2 vendor下代码移植
Vendor下面的代码主要是两部分,一个是sensor_libs目录下的sensor具体设定、配置文件,另一个是chromatix下面的ISP效果文件。具体为:
1. sensor_libs目录下文件:包括一个Android.mk文件和一个.c文件。其中Android.mk文件参考同目录下其他.mk文件修改和对应sensor有关设定即可;.c文件中需要填充的为一个sensor_lib_t类型的结构体:
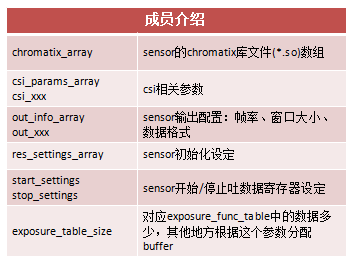
图7 sensor_lib_t成员截选图
2. chromatix目录下相关文件,在对应sensor目录下包含4个目录和一个Android文件,总共13个文件,这些文件都会由chromatix调试工具生成。下面为IMX179文件实例:
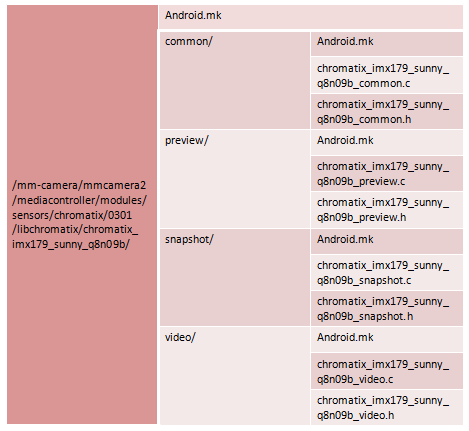
图8 vendor下chromatix相关文件示例图
3. vendor下还有eeprom文件,模组自带的eeprom数据处理相关;AF相关文件,调试工具生成的关于AF的效果文件;配置文件,把需要编译的模块填进配置文件中。

图9 vendor下其他camera文件
3 调试常见问题
3.1 kernel和vendor下命名匹配
对于不是高通释放的标准驱动来说,在参考其他代码移植调试一个新sensor的过程中,要注意在对应的dts文件中给sensor配置节点信息的过程中,“qcom,sensor-name”字段的配置要和vendor下面的sensor lib代码中的“xxx_open_lib”函数名以及对应的Android.mk中的“LOCAL_MODULE”名称匹配,否则相应sensor的vendor下库文件无法调用,这时打开camera会出现闪退现象。具体可参考平台代码sensor.c中的sensor_load_library()函数。

图10 camera name匹配详图
3.2 sensor lib中的sensor_lib_out_info_t填充
一般来说,每个sensor可以配置输出不同大小的图像。此时,除了进行对应的sensor setting来改变sensor自身的输出及相关配置外;还需要将相关的输出大小、帧率等信息通知平台端,即填充struct sensor_lib_out_info_t结构体。
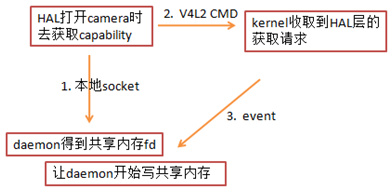
图11 高通平台获取sensor信息框图
填充的这个sensor_lib_out_info_t中的成员,最终会作为sensor基本信息的一部分被HAL层获取到,上图为高通平台获取sensor信息的一个简单框图。
在调试过程中,需要注意的是这个结构体的成员max_fps需要填写至少大于等于30;否则会因为在获取capability时无法得到有效的previewsize、video size而无法进入预览。具体可参考平台代码mct_pipeline.c中的mct_pipeline_populate_query_cap_buffer()函数。
3.3 sensorlib中的exposure_table_size填写
对于sensor端输出RAW数据,平台端进行ISP处理的情形来说,sensor端除了基本的init配置外,另外一个就是根据平台端AEC计算出来的数据来对应调整sensor的曝光。在高通平台上将平台端的AEC和具体的sensor曝光设置联系起来的是chromatix文件中的一个Exposure Table和sensor lib文件中的exposure对应接口。
这里的exposure_table_size对应着sensor lib中sensor_fill_exposure_array()接口写入的sensor寄存器的个数,平台代码中需要根据这个exposure_table_size来动态分配内存大小。如果这个值的填写和sensor_fill_exposure_array()中实际写入的值大小不一致,就会造成内存方面的crash。具体可参考平台代码sensor.c中的sensor_apply_exposure()函数。
3.4 kernel 层非常规设定
一般情况下,一个新sensor的移植和调试需要在kernel层进行的工作基本上没有问题。但是对于一些sensor来说,对于电压的设定或是MCLK的设定有非常规要求的时候,可能就需要修改平台上相关的默认设定。
对于sensor的几路工作电压 (AVDD、DVDD、IOVDD),平台端一般都是通过PMIC的相应regulator供电,而硬件上regulator的输出能力一般都有限制,代码上也会有体现。如果有sensor需要的电压超过代码上相应regulator的限制值,可以查看PMIC上的说明,如果代码上的限制值并不是硬件的真正极限,可以修改平台代码解决。
对于MCLK的设定,高通平台有一些常规的值设定。如果sensor有特殊要求,而这个MCLK不能被平台识别,这时候可以在平台的clock相关代码中,通过配置平台的PLL参数来生成特定的MCLK时钟给sensor使用。
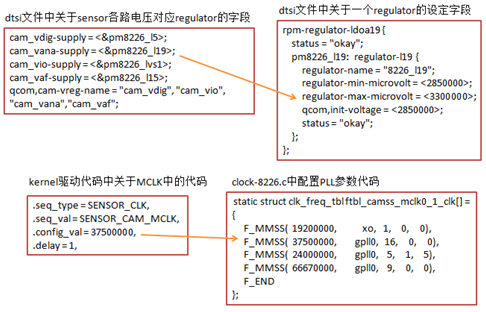
图12 kernel非常规设定代码片段















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









